Remeber:
Suppose to have an accelerometer where we measure the strain via a strain gauge, here’s a simple structure:
- All the springs and dumpers can be “merged” together in a single spring.
- ==The mass can move in every direction and we don’t exit from the elastic regime==.
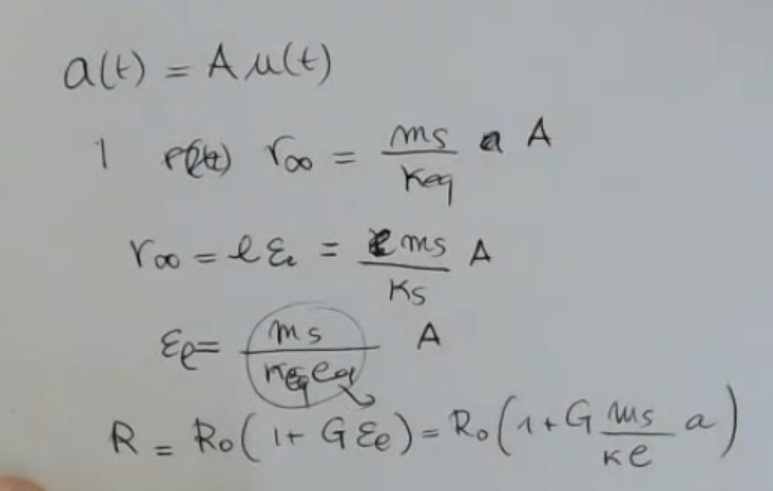
- The resistances values will be:Where:
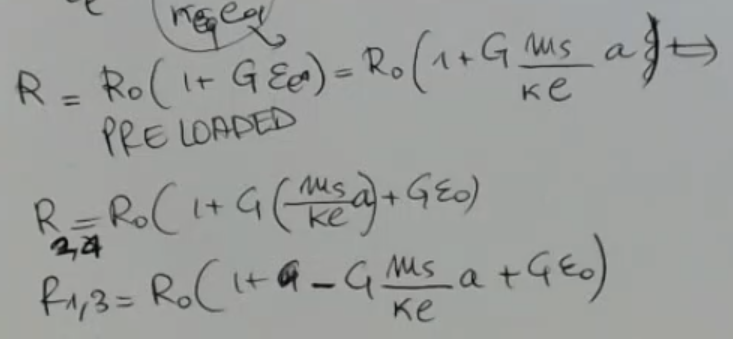
- Also we have to consider that the strain gauges are pre-deformed so:

- All the springs and dumpers can be “merged” together in a single spring.
- ==The mass can move in every direction and we don’t exit from the elastic regime==.
 Where:
Where:
- : regime value of the elongation.
- : amplitude of the acceleration.
- : sismic mass.
- : elastic constant of the equivalent system.
- or : elastic constant of a single sensor/spring.
- : length of the spring.
- : strain in the single direction we are considering.
- : longitudinal strain.
- : equivalent damp coefficient.
- : the strain gauge factor.
So I have an output, which is linearly related to the acceleration.
Actually, since they are pre-deformed, I have to add to this deformation, due to acceleration, the ones which were impressed at the beginning, so :