Remeber:
Ultrasonic waves can be devided in two types:
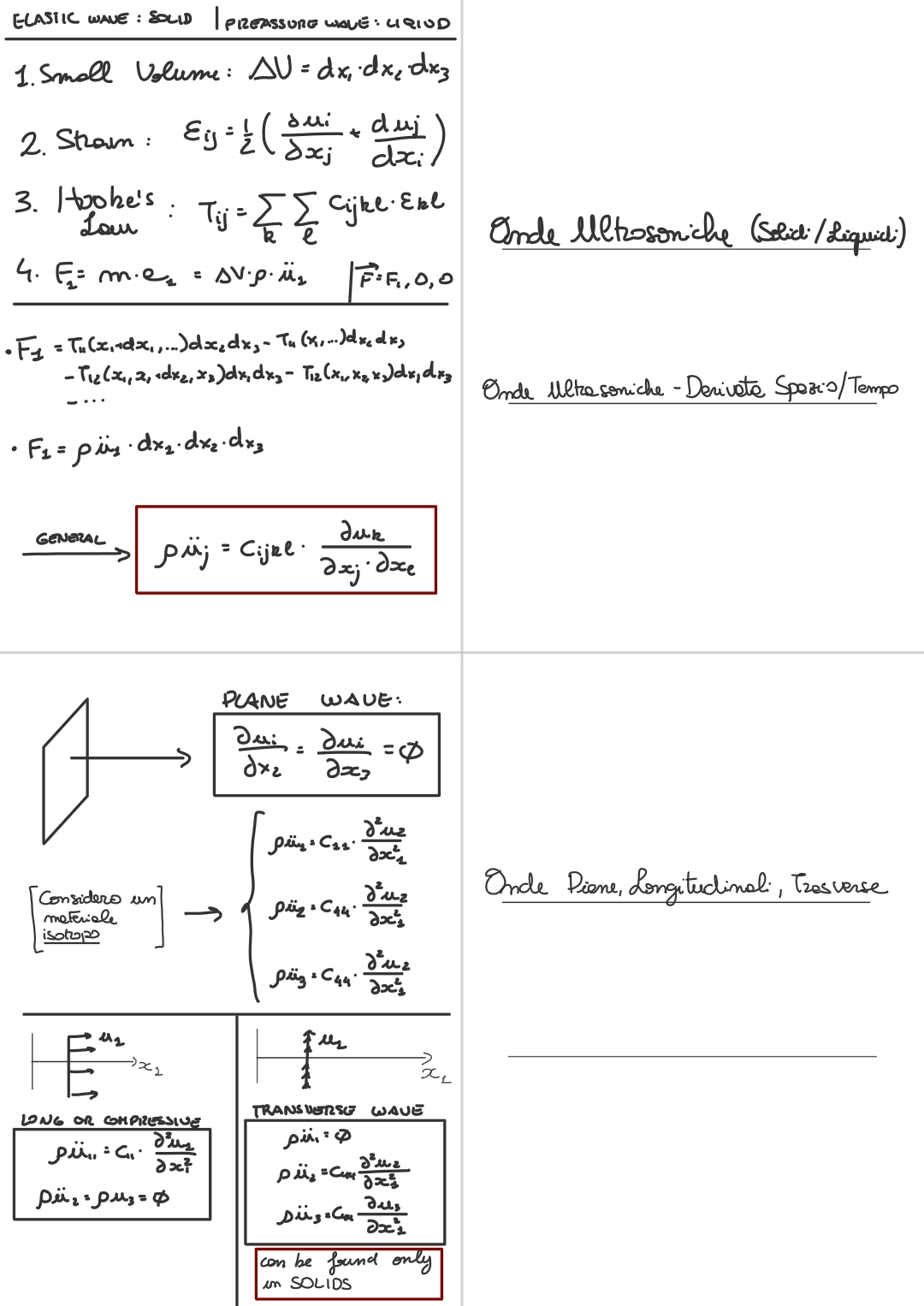
- The “elastic waves” are waves that propagates in solids.
These are also called pressure wave or stress wave and are related to the elastic behavior of solids.- In fluids instead, they are usually called “acoustic waves”.
We talk about acustic waves also for waves that propagate in air or human tissues.
To simplify things a lot, in our studies we have considered:
- Perfect continuous elastic medium.
- Wave of small intensity, which grants a linear phenomena.
- No dissipation or loss.
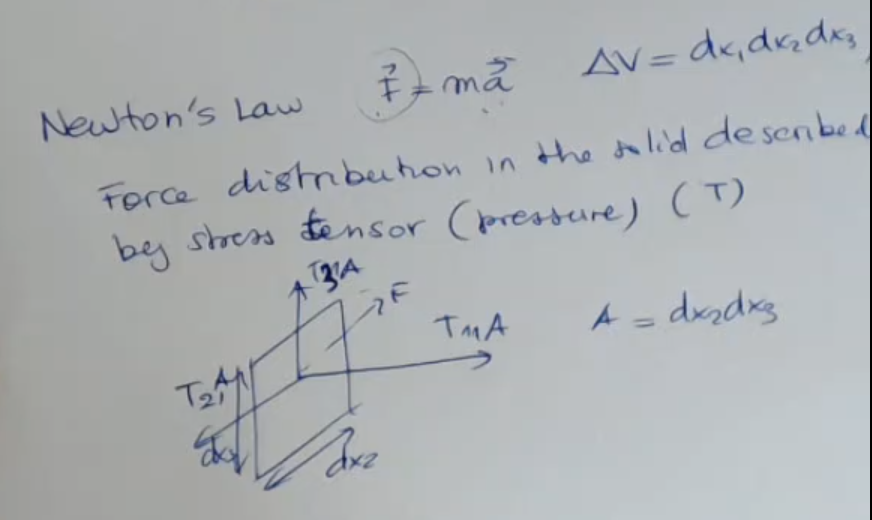
Here is the setup we have used to describe the propagation trough solids:
- Take a small ideal small cube of volume and we select a generic vertex on it:
So we define its small voulume as: .
Then take a the opposite vertex on the cube, opposite with respect to .- Using this small volume, the definition of stress and the second newton’s law , and considering for simplicity.
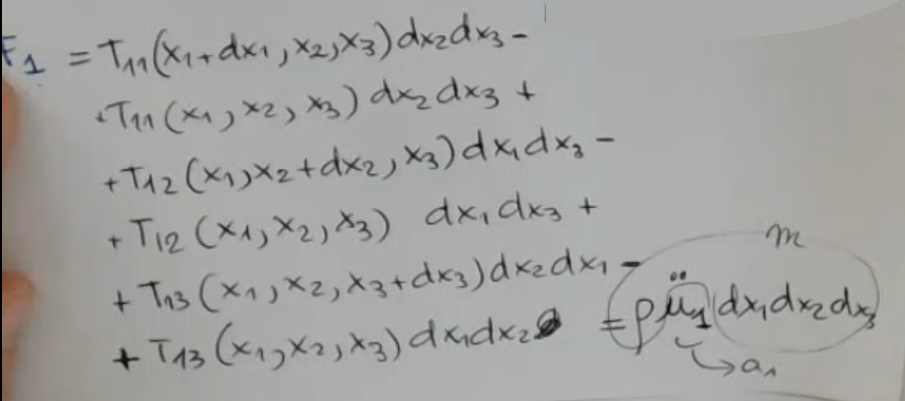
Then we describe the force as athe sum of all the stresses multiplide by their corresponing surface .
Here is the complete formula (NOT IMPORTANT):
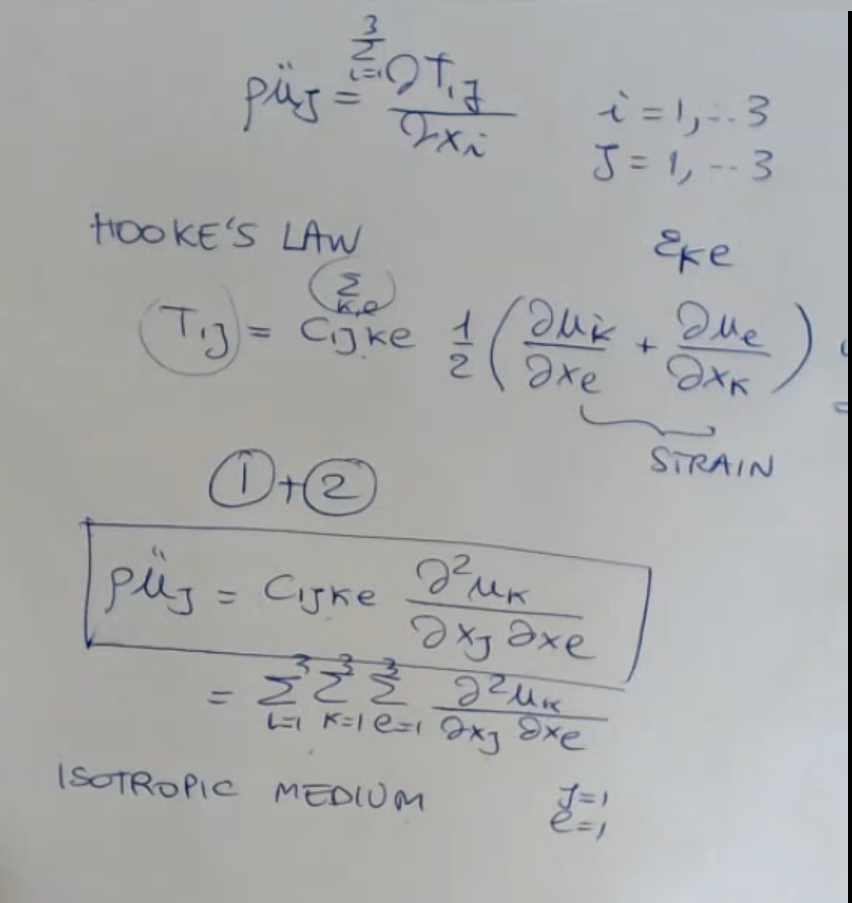
is the acceleration on the axis , since we have considered only .- We perform the limit and we find:
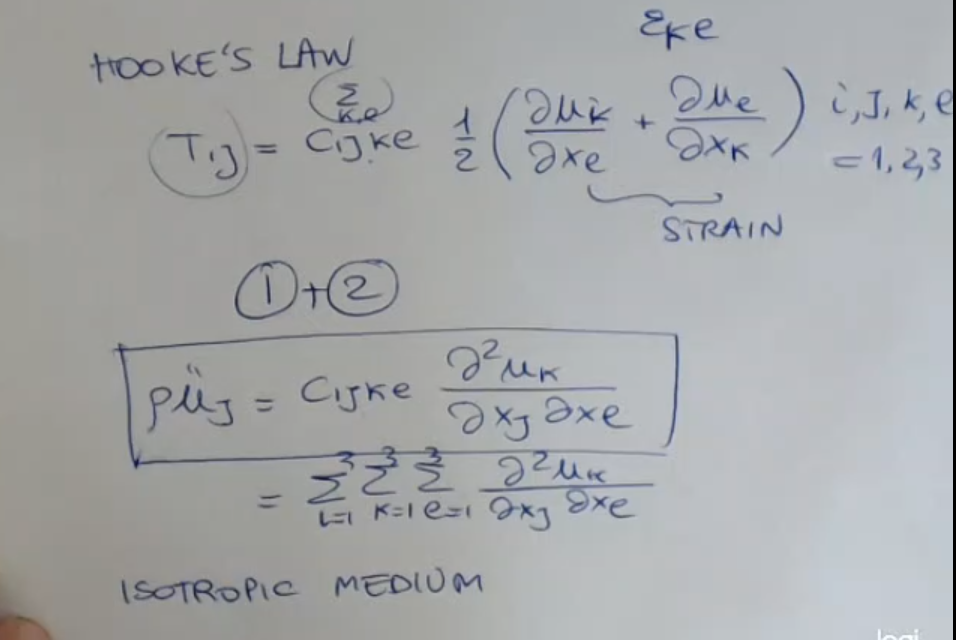
- We define know that the Hooke’s law is:IMPORTANTE Where the strain is defined asIMPORTANTE :
- Using the two formulas (and considering a general force ) we find an usuful wave equation that relates a derivative in time with a derivative in space:This particular definition is useful when talking about ultrasonic waves.
Where:
- is the -the axis on which the waves propagates.NOT_SURE_ABOUT_THIS
- While defines the direction where the particles that compose the wave move.NOT_SURE_ABOUT_THIS
- For isotropic materials we have defined the collapsed stifness tensor.
Memory Card
- The elastic waves are these waves in solids, usually the name of waves in solids.
These are pressure wave or stress wave and are related to the elastic behavior of solid, elastic behavior. - Whereas when we are speaking about waves in fluid, they are usually called acoustic waves through fluid, or in general, ultrasonic waves, which gives the overall description of the phenomena.
- So we think about a continuous elastic medium.
To simplify things, a lot, we consider:
- Perfect ontinuous elastic medium.
- Wave small intensity, which grants a linear phenomena.
- No dissipation or loss
We take a small ideal small volume and we select a generic point :
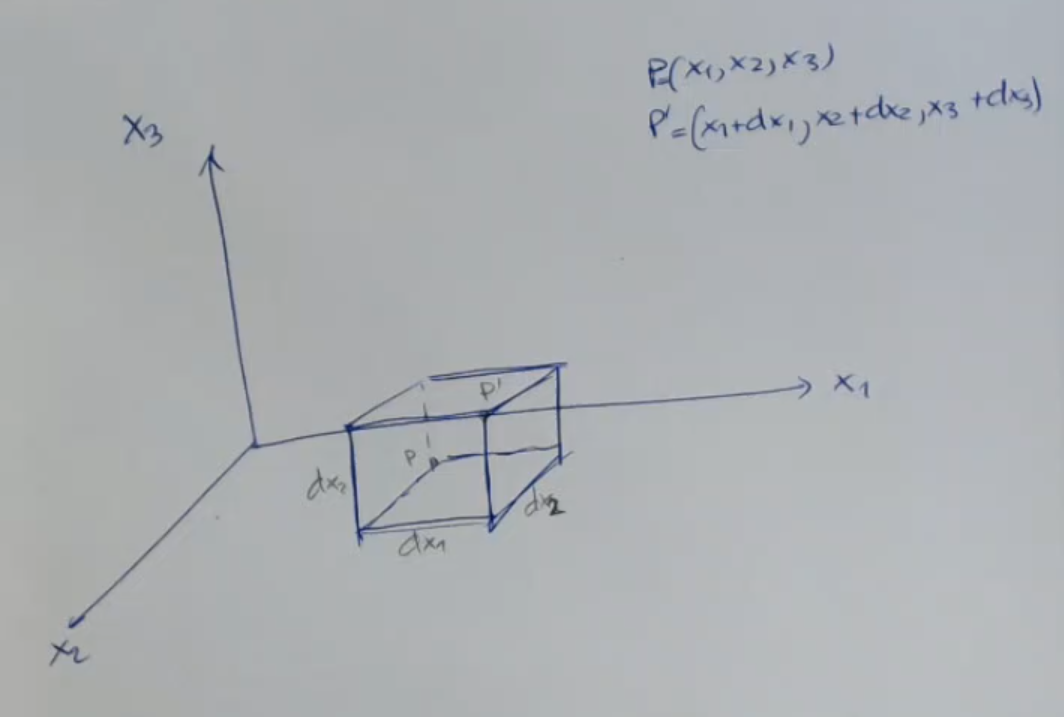
- Then we take a point in the opposite site of the cube with respect to .
- It is a small volume:
Now we try to write the Newton’s law for this small volume, which is:
- This force applied to the volume, which causes the acceleration .
- It will then be resisted by the elastic force, which tends to keep this volume in its own position.
- We want to understand which is the acceleration applied to the small volume.
- We need to find the result of the force applied to this small portion of our solid , which is internal to the solid, and we know that the force distribution in the solid is described by the stress tensor .
So the component of the force applied to the whole volume , will be equal to:
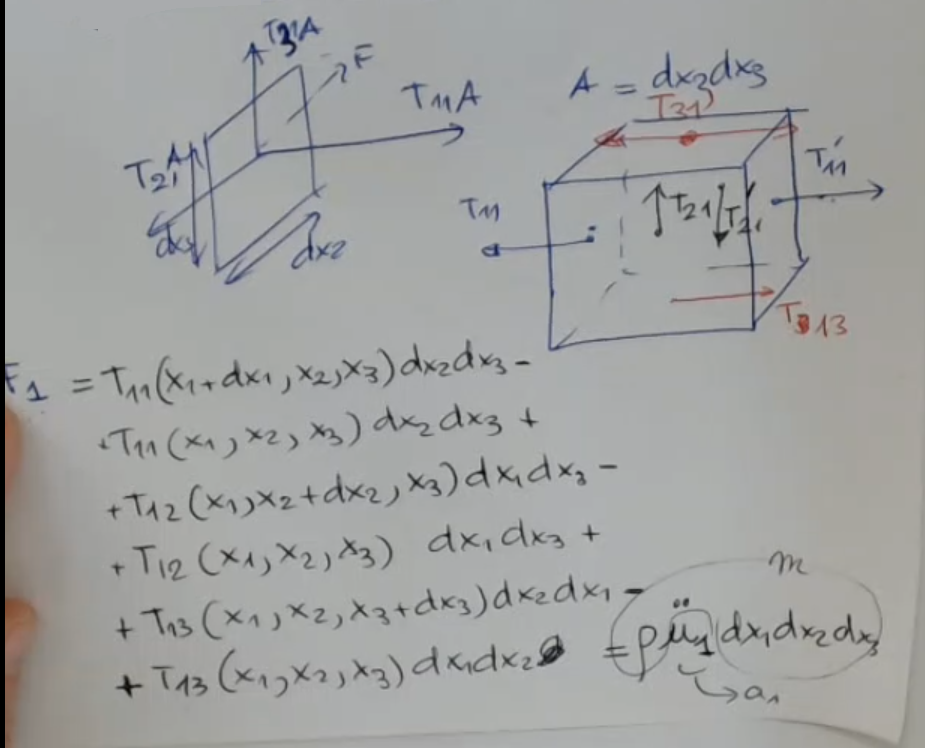
- We consider all possible sheer forces in our small solid , so by taking two opposite points and we can add all the sheer forces apllied at each of the solid ( faces in total, we can call them: , , , , , ), all having the same direction of the force (half will point towards and the other will point at the opposite direction)
- NOTE: In the drawings and are wrongly directioned, they should be pointing in the direction .
- NOTE: In the drawings should be called .
- Each small force has its counterpart that causes stress in the material , this way we can model the “streches”/stress of the material.NOT_SURE_ABOUT_THIS
Professor explonation:
“I try to zoom on the volume and let you understand maybe what happens:
So I have to combine applied to this face here, with the one applied to the opposite face , then I have to combine, let’s change color , , , .
So I have to take into account all the components along this first direction here.” - : density of the solid.
- , where is the acceleration and the position.
So we can define the limit:
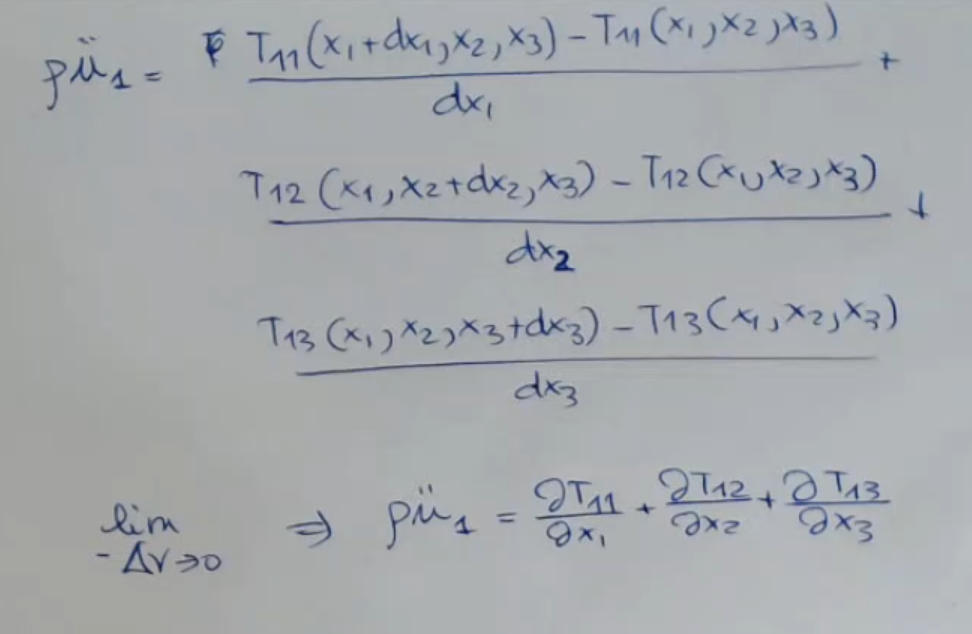
- For is exacty the definition of derivative.
Equal to:
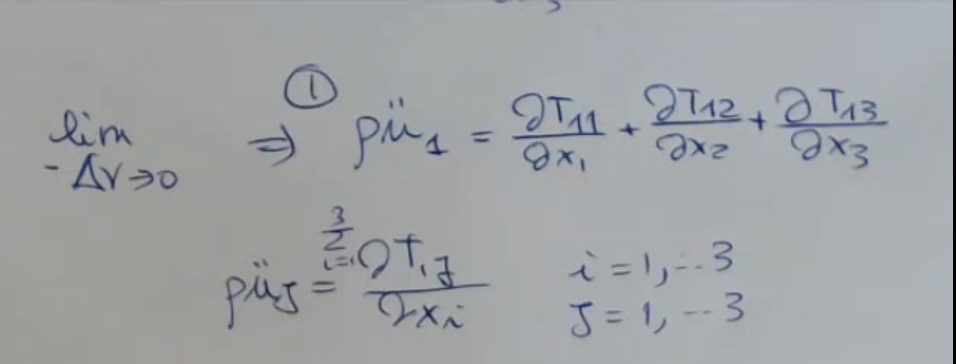
- I write it better: Where:
- is the normal direction to each normal.
- is each component of the force/acceleration.
We can then define the Hooke’s Law:
-
: coefficients of the matrix.
-
: position along the -direction or axis.
-
: -axis.
-
Let’s break down this formula:
- , , all represent the axis, and can be seen as the combination them
- is derived by the first index of the matrix, we have seen before the example where we studied the component and used all , in that case .
- , and are not derived by anythin in particular.
- We can define the strain as: This formula is due to the fact that for anisotropic materials (like piezoelectric materials) the shear strain is not , so for the strain is the same definition as before, so or for more complex materials: , and in this case we defined the displacement as .
Insted if we applied a shear force to the materail, we would need to account for the sheer strain. - So we can have seen that the realationship between stress and strain like:So the stress is the summation of all the strains both perpendicular and paralle to the vector , it is similar to how we have defined the stress for isotropic materials, but this time we need to consider all the strains, not just the parallel one, since we are working with anisotropic materials, also the coefficient (previously for isotropic materials called the Young Modulus ) will not be a single constant, but it will depend on the surface and type of material, it can be represented by a 4D matrix .
- Remeber that we have defined for isotropic materials:
- Young Modulus:
- Poisson Modulus:
- Stress: , where : force, and : area
- Strain: , where we use the and indices to mean the variation, the axis parallel or perpendicular to the direction of the force.
So we have this structure here, of the full matrix:
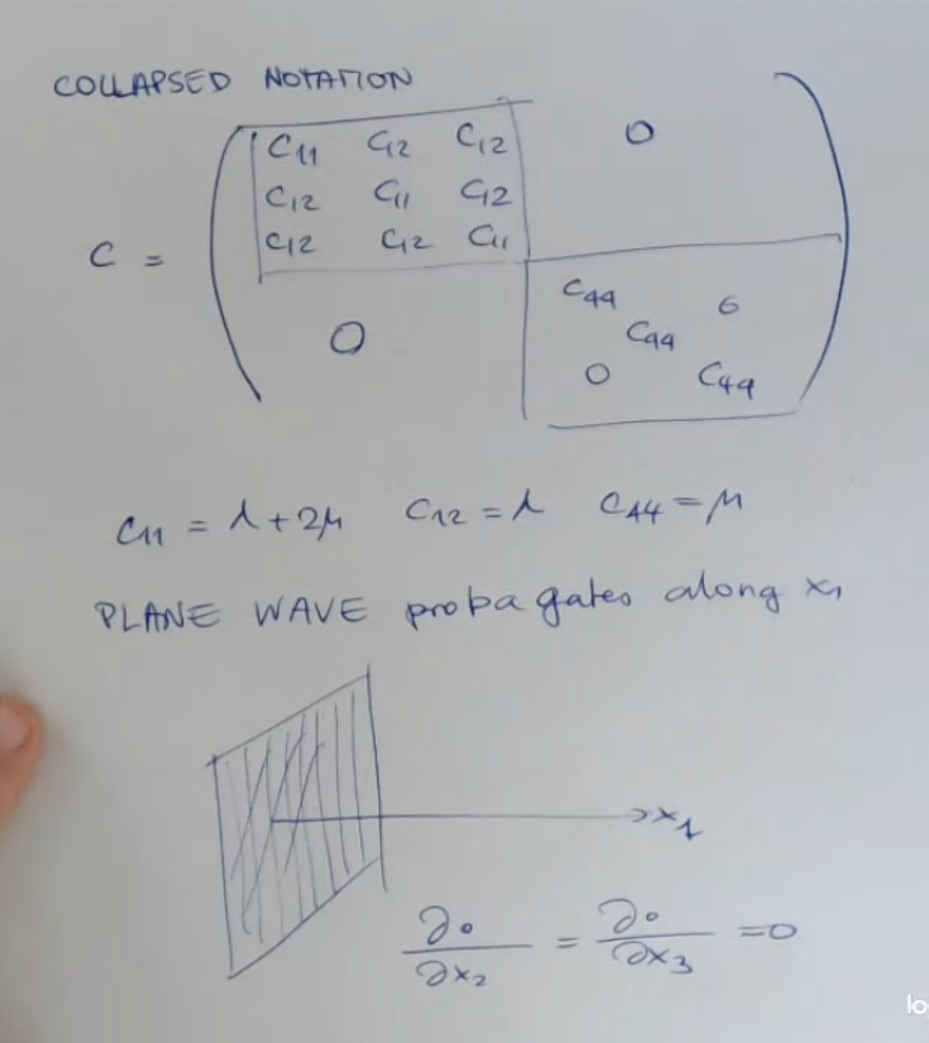
- So given and we can find the whole matrix.
- If derivete a planar wave which propagates in the direction, in or the result is .
- tensor: “stiffness tensor” or “elasticity tensor”, due to symmetry the elements of this matrix can be reduced to elements for orthotropic materials and for transversely isotropic materials.
In this case we taked as an example an isotropic medium, like Silicon which only needs elastic constants, and can be represented with only indipendent constants. - Quartz instead has independant components (still very few), other anisotropic materials can have more.
- To get an idea, with , and , we can find:
- Young Modulus:
- Poisson Modulus:
So finally the complete Hooke’s Law is defined as:
- So actually we ==need only two parameters to fully describe, the elastic behavior of this kind of isotropic material==.
- And therefore now we have a simplified version of the equation because we have many zeros here.
- So in practice for isotropic materials, we can always assume , for the other cases for example,