List of things to memorize:
SaM - Primary Sensors
Link to original
- SaM - Definition of Primary Sensor
- SaM - Types of Primary Sensors
- SaM - Different Definitions for Preassure
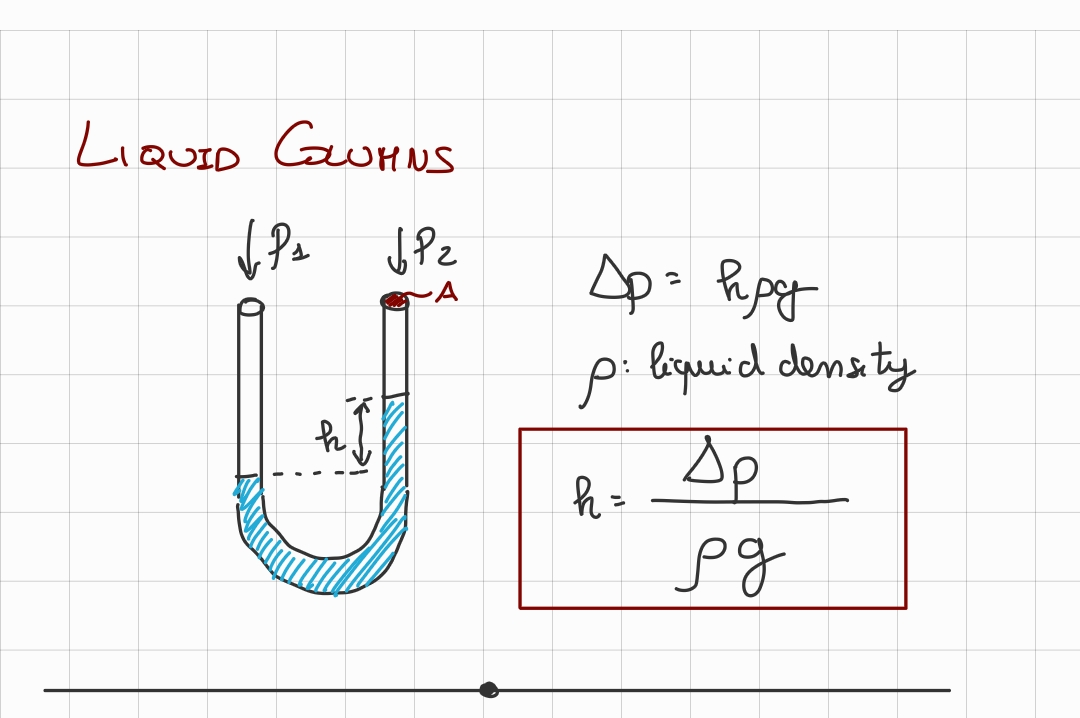
- SaM - Liquid Columns
- SaM - Deformable Structures
- SaM - Burdón Tubes
- SaM - MEMS Membranes
- SaM - Orifices
- SaM - Pitot Tube
- SaM - Anemometry or Hot Wire
- SaM - Introduction to Ultrasounds
- SaM - Fan or Turbine
- SaM - MEMS Cantilever
- SaM - Load Cells or Pillar
- SaM - Gyroscope
- SaM - Accelerometer
- SaM - Primary Sensor for Temperature (Skip)
SaM - Definition of Primary Sensor
Sensor = Primary Sensor + Real Sensor The typical structure of a device is: Sensor ⇒ Front-End Electronics ⇒ A/D Converter
- ==A primary sensor transform a non-electrical quantity into another (more “convinent”) non-electrical quantity==.
- ==A sensor (or in this case called “real sensor”) instead, transforms a non-electrical quantity into an electrical quantity==.
SaM - Different Definitions for Preassure
-
differential pressure (so the difference between two pressures)
-
absolute pressure, so it’s like taking as pascal
-
gauge pressure, which is a differential pressure where is atmosphere
-
There are many different applications and solutions for primary sensors for pressure, and they depend essentially on the range (preassure ranges) can be very different
-
The unit for pressure that should be used is Pascal.
-
Actually also atmosphere is used: one atmosphere is a little more than 100 kilopascal.
-
It is also used bar, a bar is exactly 100 kilopascal.
-
PSI which is pound per square inch, which corresponds to .
SaM - Liquid Columns
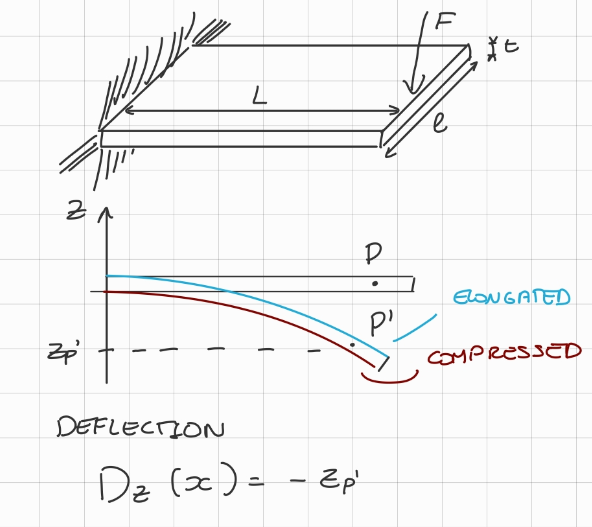
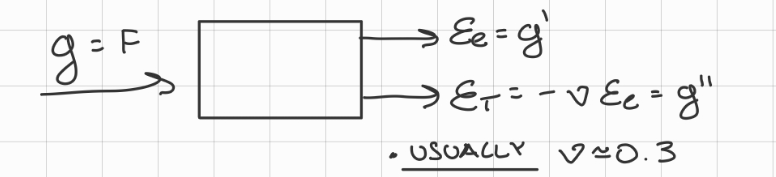
SaM - Deformable Structures
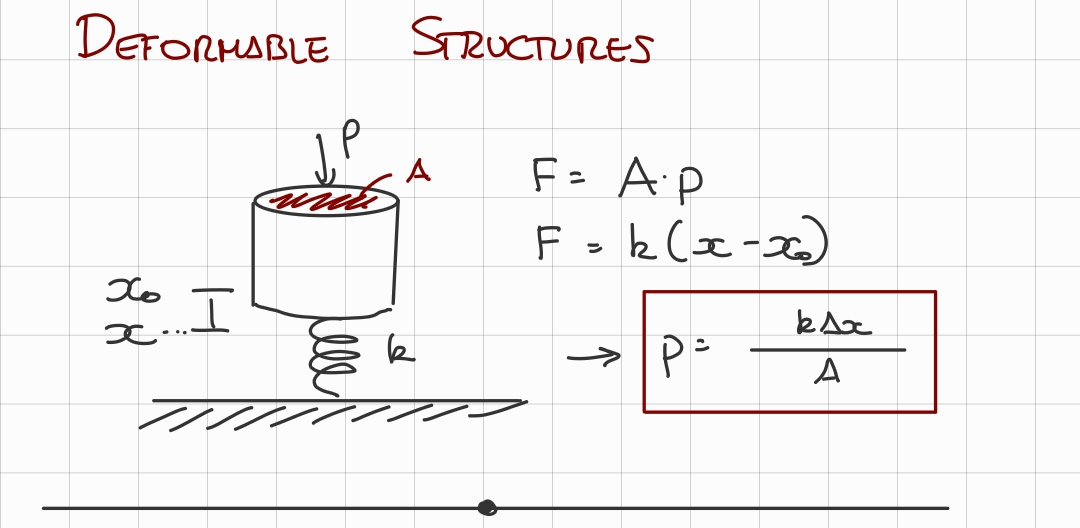
- Formula:
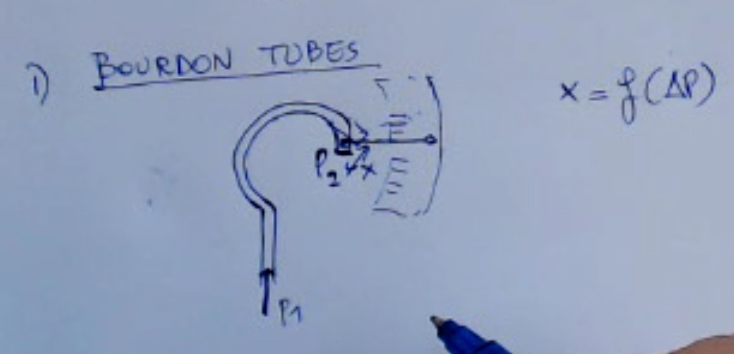
SaM - Burdón Tubes
SaM - MEMS Membranes
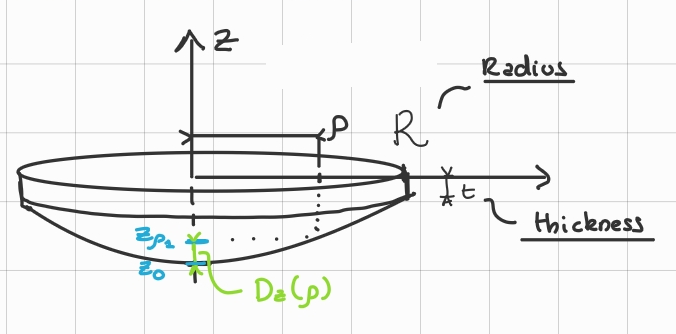
- Formula:Where: (NOT IMPORTANT, too complicated)
SaM - Orifices
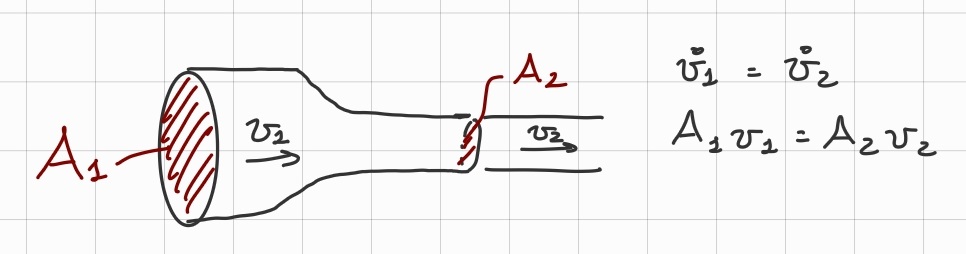
- “Orifices” in italian: “Orifizi”.
- Bernoulli equation:
- Orifices equation:
SaM - Pitot Tube
- Structure:
(One tube has static preassure, used as reference, the other is open and its preassure varies due to the velocity of the fluid)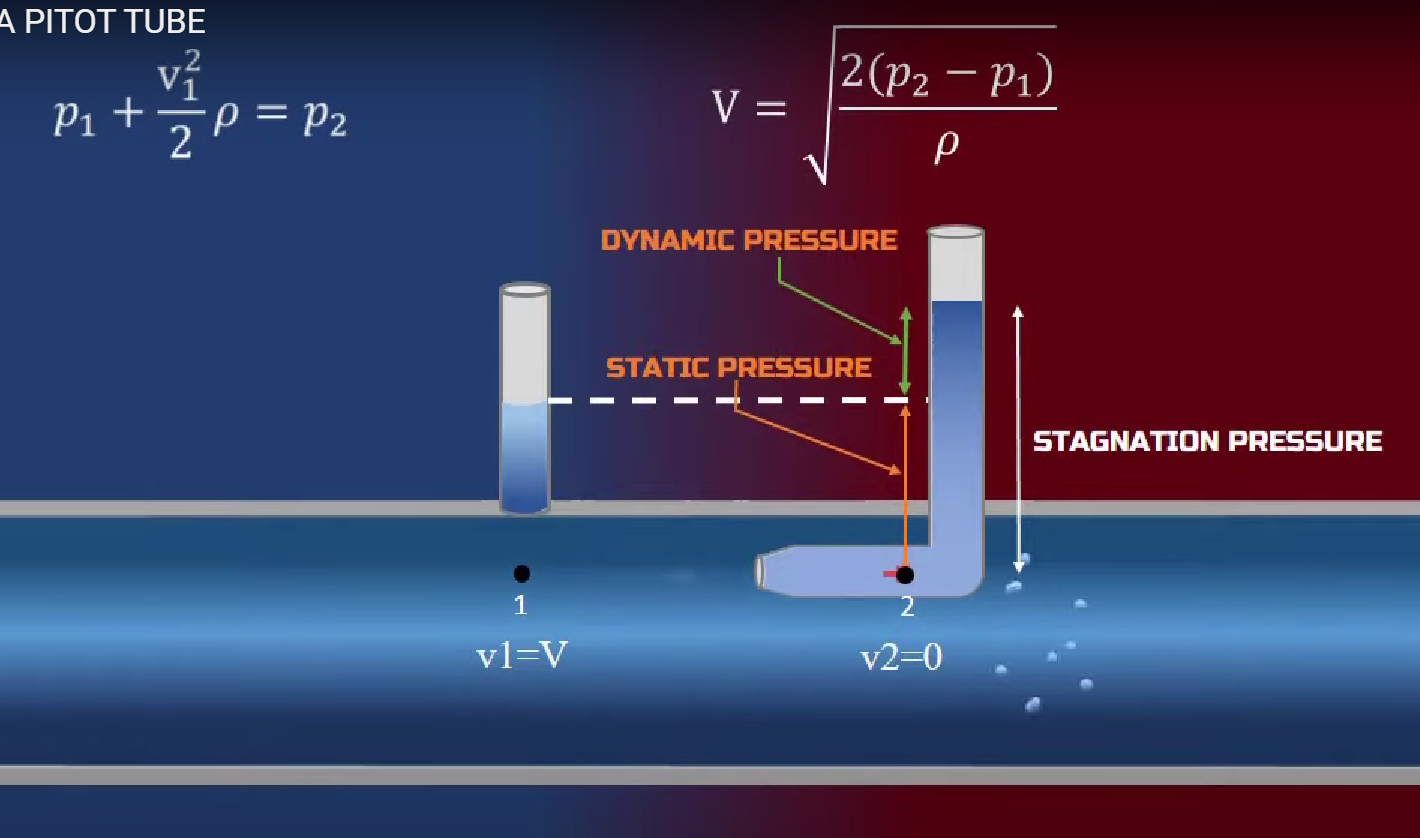
- Using the bernoulli equation, if we measure the difference in height:Or if we measure the difference in preassures:Where:
- .
- . So:
SaM - Anemometry or Hot Wire
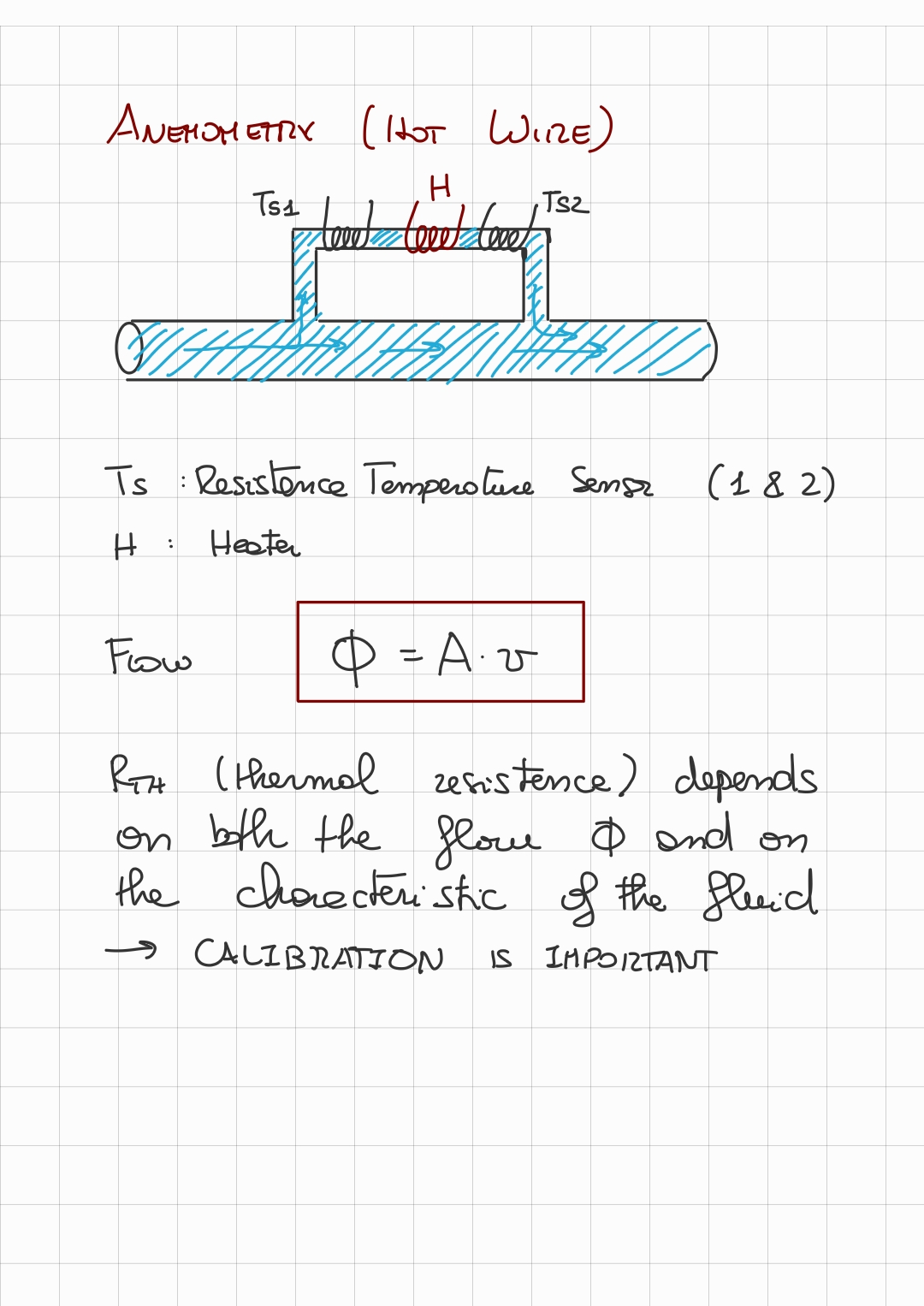
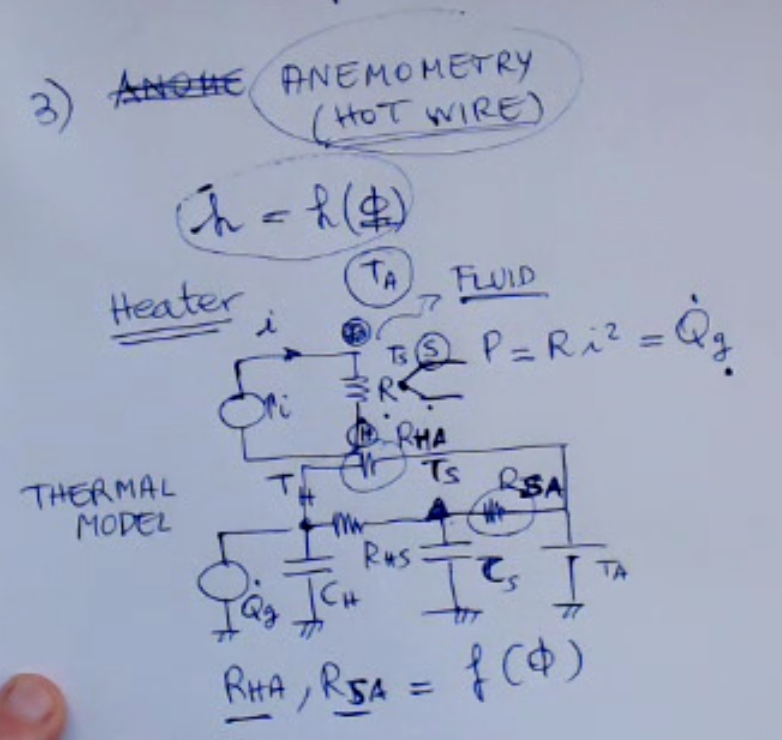
- We heat something and then we sense the temperature of other devices close to this heater, to understand which is the convection factor, the convection behavior of the fluids surrounding this heat source
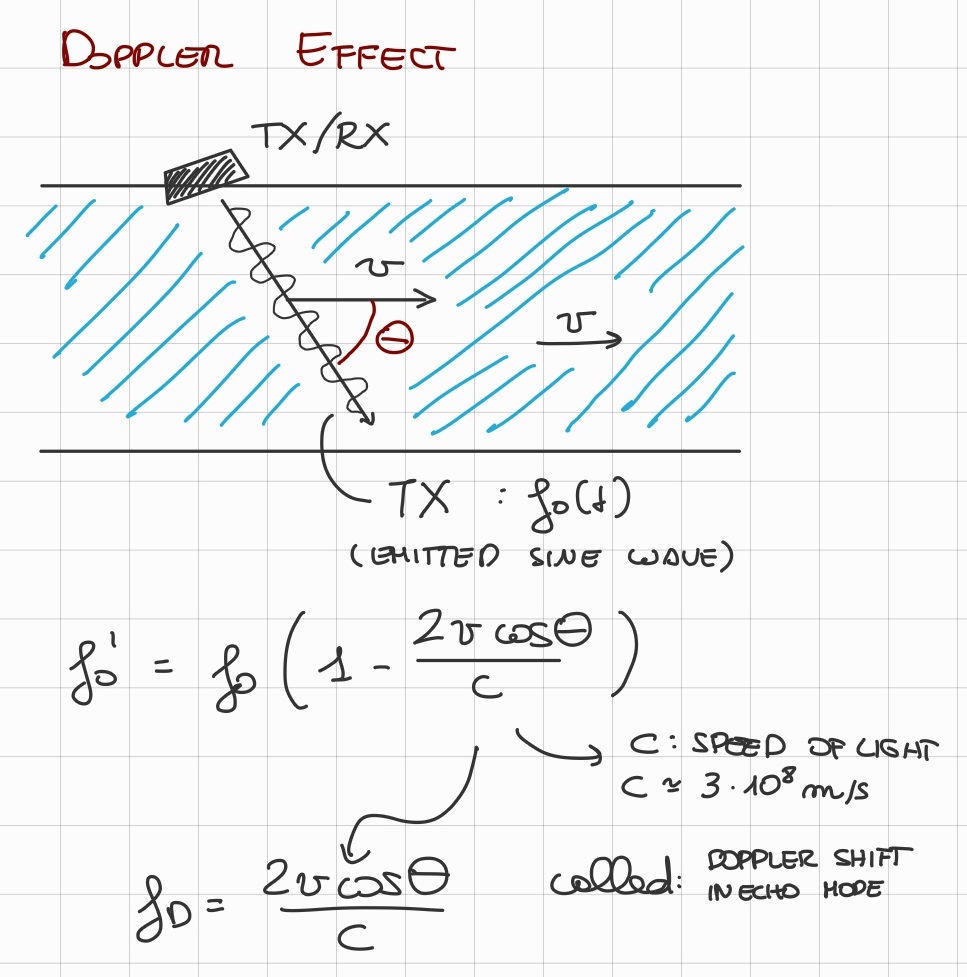
SaM - Doppler Effect for Primary Sensors
Where:
SaM - Time of Flight Principle for Primary Sensors
- Formulas:And:
- Structure:
(There is an error in the following formulas)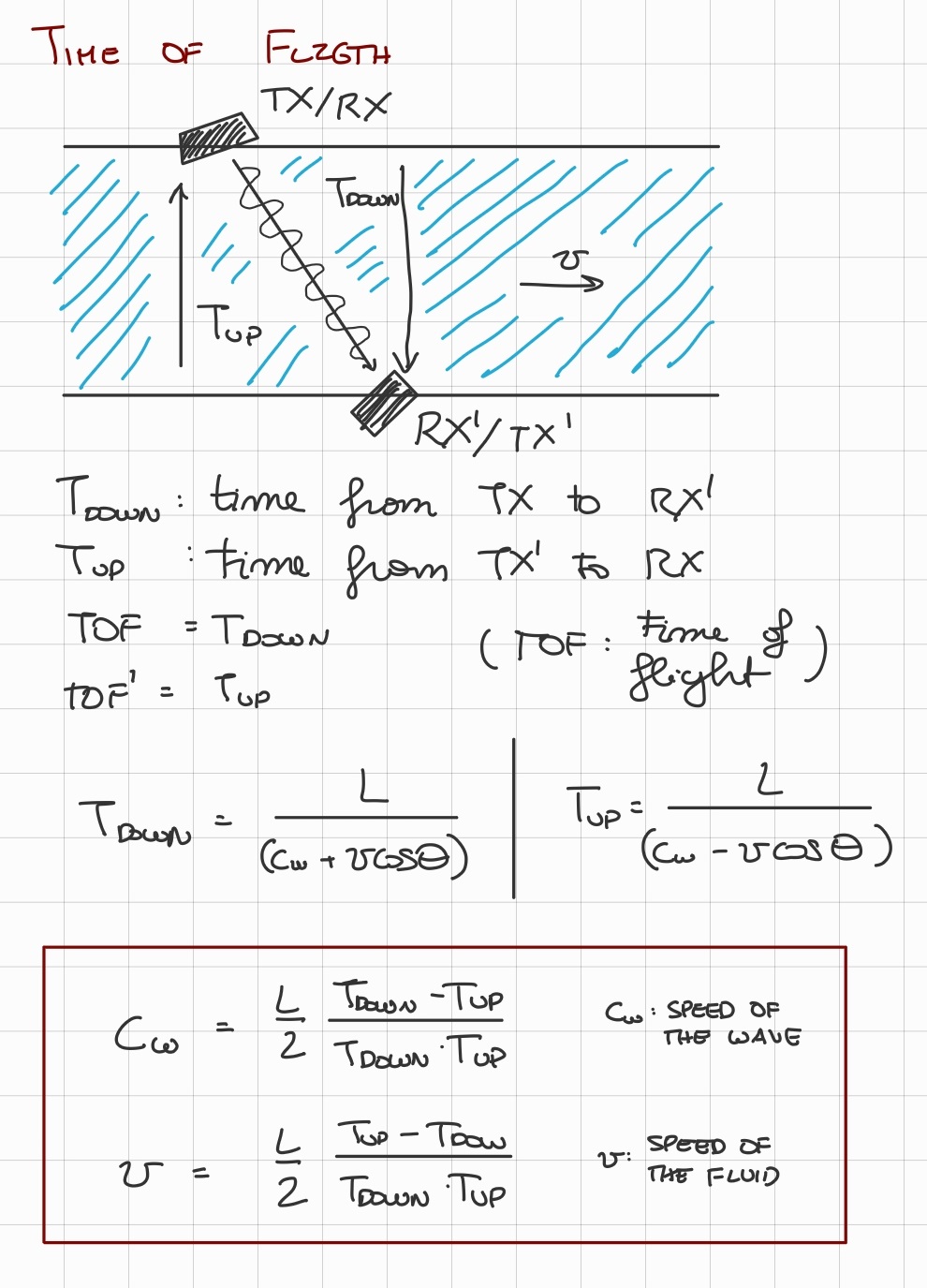
SaM - MEMS Cantilever
- Formula:More specifically:
- It is a differential primary sensor:

SaM - Load Cells or Pillar
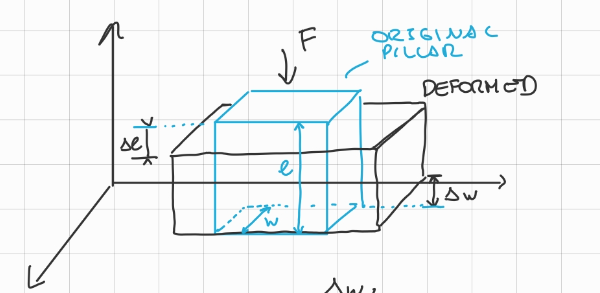
- Formula:
- It is a differential sensor:
SaM - Gyroscope
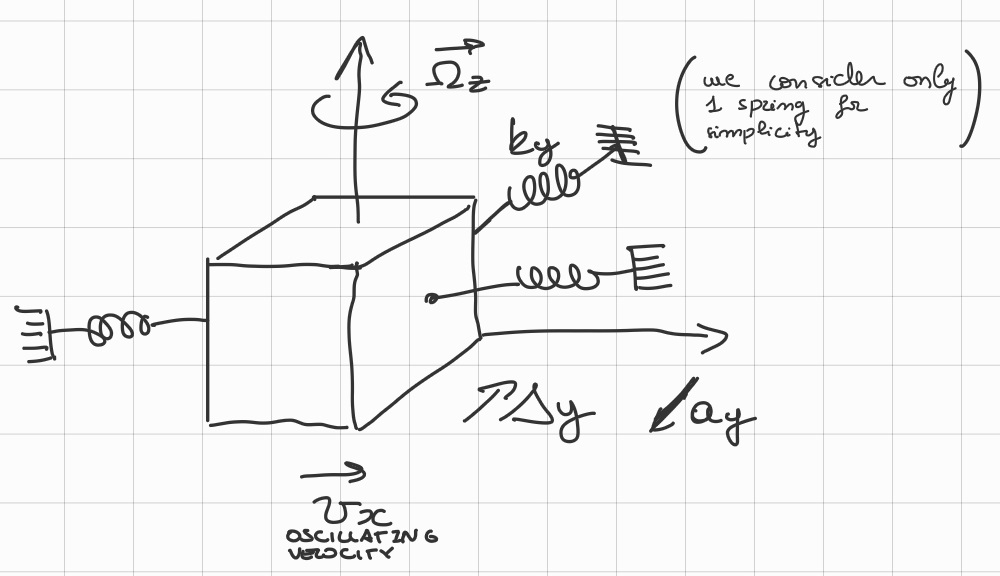
- Coriolis aceleration formula:
- Simplest case (angular velocity perpendicular of the velocity):
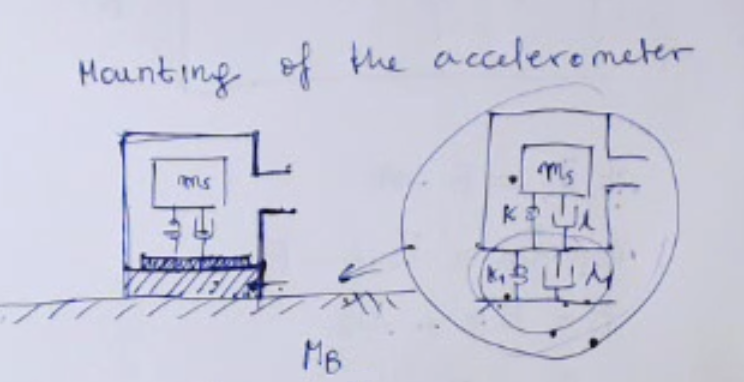
SaM - Accelerometer
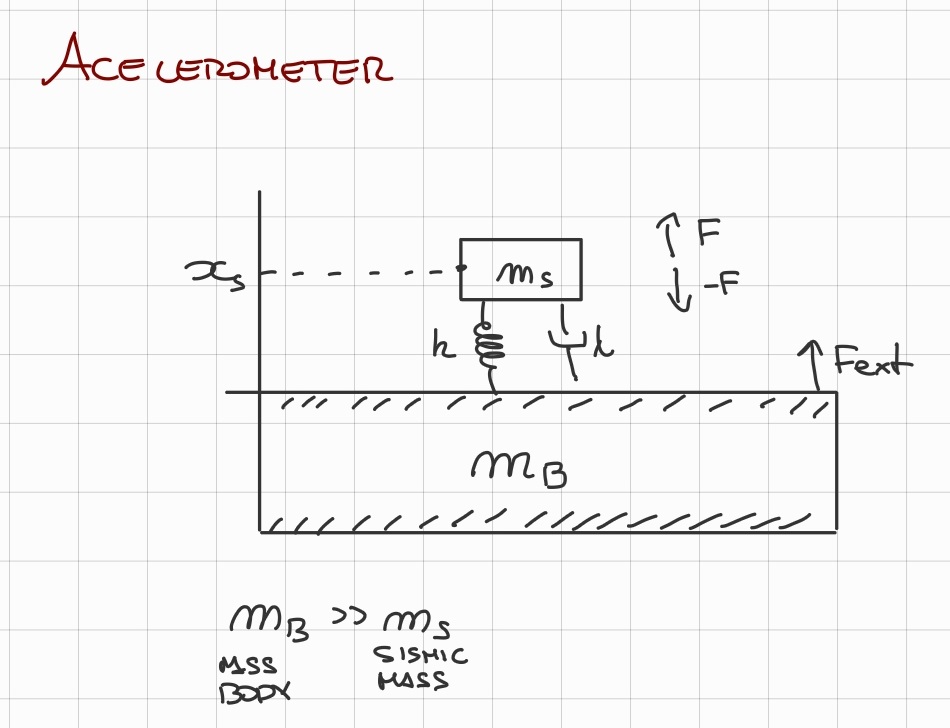
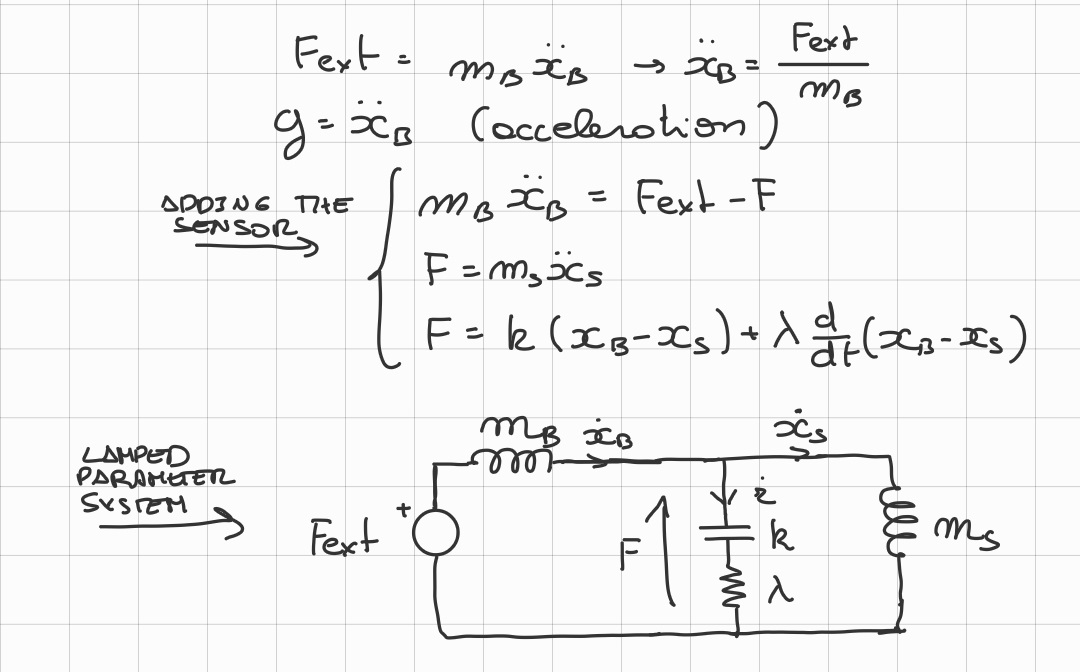
- Calculations:
- Find the lumped parameter model:
- Find the Thevenim Equivalent:
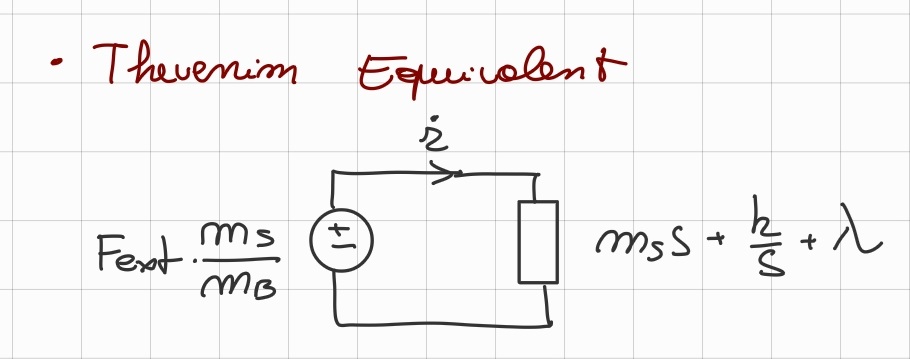
Simplifying the Thevenim resistance, since , so we exclude it from the load, since a parallel between . - Calculate:
- Transform into Bode form:
- Find the lumped parameter model:
- Mounted and Unmounted accelerometer:
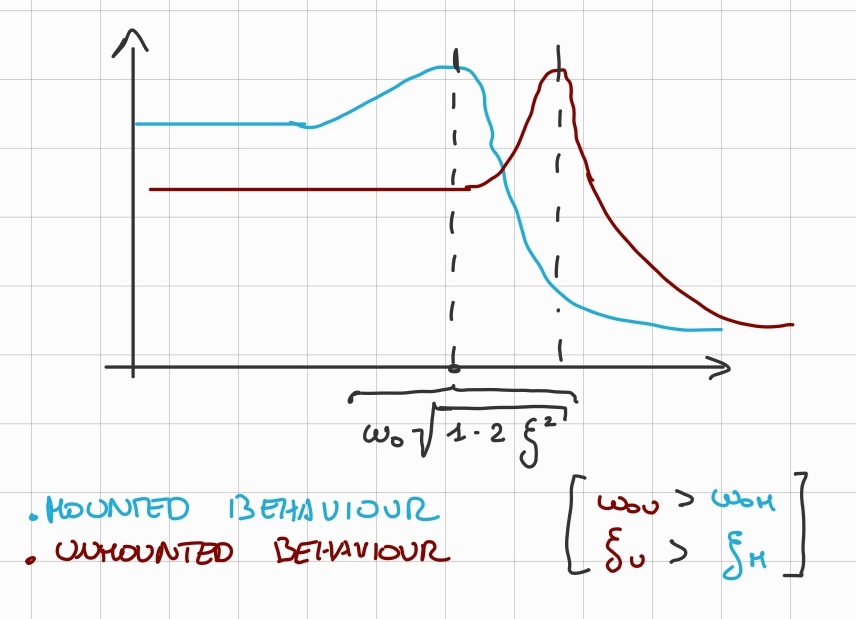
- Mounted Behaviour if .
SaM - Non-Idealities of an Accelerometer
- Gravity:
- If the sensor does NOT rotate ⇒ offset (can be corrected).
- If the sensor rotates ⇒ variable offset (cannot be corrected).
- Not mounted in a “solid” way:
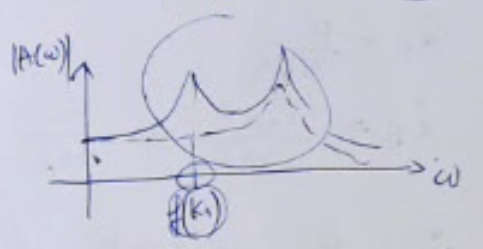
SaM - Transfer Funtion of a Mounted Accelerometer
SaM - Primary Sensor for Temperature
(Skipped)