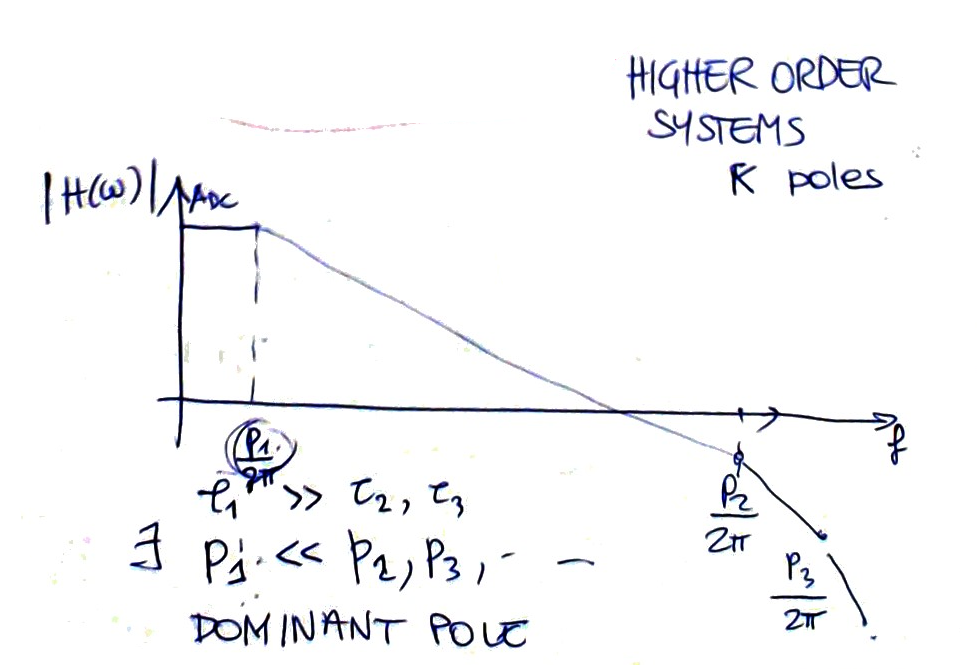
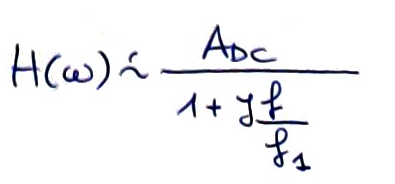
This system can be approximated by a first order system.
In this case we speak about dominant pole, which is the one that limits the dynamic of the system:
Search
Jul 31, 20241 min read
This system can be approximated by a first order system.
In this case we speak about dominant pole, which is the one that limits the dynamic of the system: