List of things to memorize:
SaM - Base Knwoledge on Sensors
Link to original
- SaM - Types of Sensor
- SaM - Types of Active Sensors
- SaM - Traditional Sensors vs. MEMS • MEMS Technology
- SaM - Definition of Primary Sensor
- SaM - Types of Primary Sensors
- SaM - Front End Electronics Strategies
- SaM - Characteristics of a Sensor
- SaM - Sensor Linearization
- SaM - Ideal Linear Sensor
- SaM - Definition of Isotropic and Anisotropic Materials
- SaM - Physical Dependencies of a Sensor
SaM - Types of Sensor
Link to original
- Passive Sensor:
- Resistive Sensors
- Reactive Sensors
- Capacitive Sensors
- Inductive Sensors
- Active Sensors:
- Piezoelectric Sensors
- Thermoelectric Sensors
- Oscillators
SaM - Types of Active Sensors
In active sensor we have voltage generation, or better things which resemble voltage generators, which are:
Link to original
- electrochemical (for chemical compound).
- electromagnetic (this is for speed, essentially).
- thermoelectric (for temperature).
- charge generator, this have high internal impedance, to connect to what we have seen some less than ago, and this can be further divided in:
- piezoelectric (for strain and stress).
- electrochemical (for chemical compound), this is a chemical and chemical sensor. It sends some specific compound obviously not all.
- optoelectronic, this uses the optical power.
SaM - Traditional Sensors vs. MEMS • MEMS Technology
I remember that sensors, now a days, can be divided into two different words:
- Traditional sensors.
- And the other one is the word of micro machined sensors, which are called also MS or MEMS.
==Micro machine sensors are based on the IC technology, IC stands for integrated circuit, so this sensors exploit the same technology that is used to realize the IC (integrated circuits). And so it exploits, a technology able to have mass production, a technology which is the top level technology, and a technology which allows the integration of the electronics, which can be: frontend + conversion + processing, along with the sensor. So sensor and all the electronics needed to read the sensor, and to manage the sensor, are realized on the same silicone chip==.
==Due to the integration here, we have a good control over the sensor, so we find reproducible sensor and cheap sensors. Also we can reach very good signal to noise ratio because noise rejection is made possible by integrating by putting the front end close to the sensor==.
==The main difference between these two classes, is that MEMS sensors are NOT suitable for harsh conditions. And moreover, since they are very small structures, sometimes the full range, the measurement ranges of the devices are lower==.
Link to original
SaM - Definition of Primary Sensor
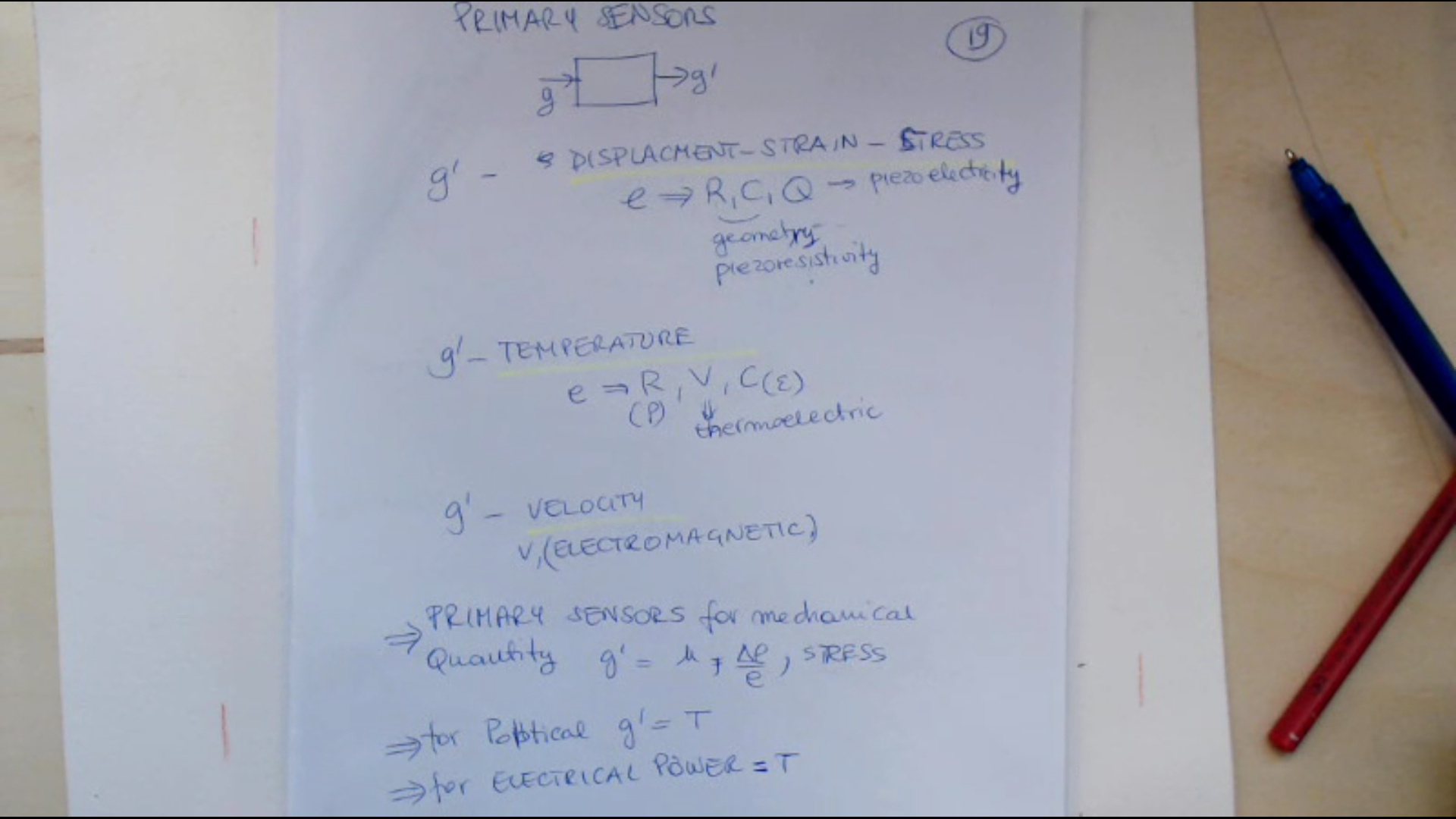
Sensor = Primary Sensor + Real Sensor The typical structure of a device is: Sensor ⇒ Front-End Electronics ⇒ A/D Converter
- ==A primary sensor transform a non-electrical quantity into another (more “convinent”) non-electrical quantity==.
- ==A sensor (or in this case called “real sensor”) instead, transforms a non-electrical quantity into an electrical quantity==.
Link to original
- Convenient quantitites for this output port of the primary sensor are displacement, strain and stress.
- This is because we know that each of these quantities here can be easily sensed by means of resistive, capacitive or piezoelectric sensors.
- Another convenient quantity is temperature because in this case we can use thermoelectric effect, we can exploit capacitive or better resistive sensors.
- It can be also a velocity, or speed, because in this case we can exploit electromagnetic effects to have a sensor.
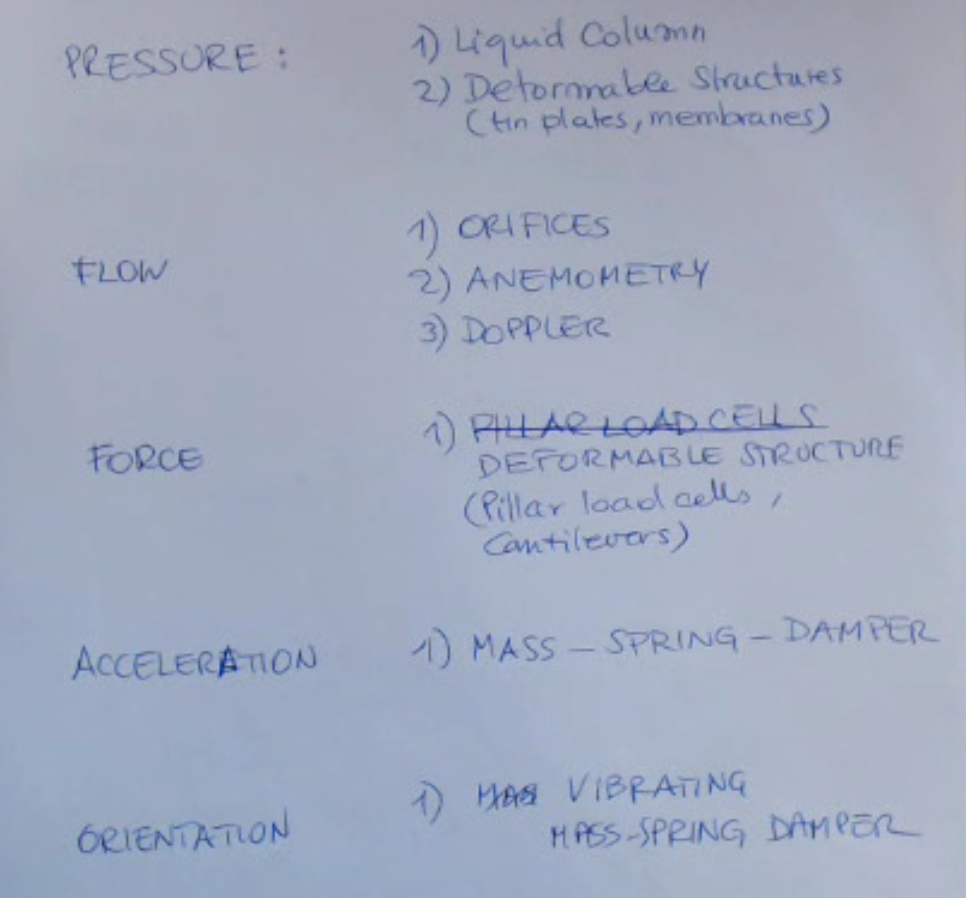
SaM - Types of Primary Sensors
Link to original
- Preassure Prymary Sensors:
- Flow:
- Force:
- Acceleration:
- Orientation:
SaM - Front End Electronics Strategies
Some strategies that are usually employed in the in the front end electronics are:
- Feedback.
- Differentials structures.
- Filtering.
- Compensation.
Link to original
Characteristics of a Sensor
- Sensitivity:Relative sensitivity:
- Resolution: it is the minimum variation of the input, which causes an output variation, recognizable from noise.
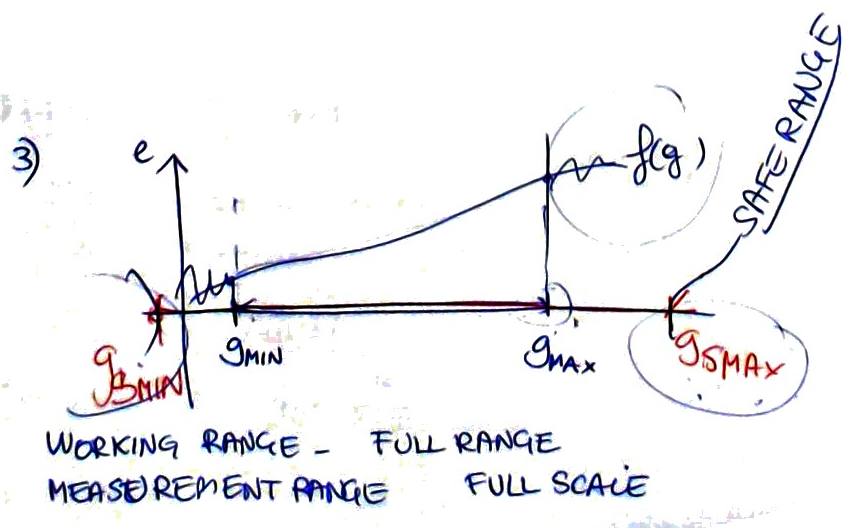
Usually we take 10 times larger than noise. - Working Range & Safe Range:
- Accuracy (or Maximum Error)
You want to know the quantity (real value), you use a sensor to measure it, the sensor is not perfect (we expect the sensor to have an input-output function instead this specific sensor has a function different from the real one ).
So instead of reading the value (expected/real value) you will read an electrical value , then you will “traduce” this already wrong value into the measured value using this formula where is the correct function, given by the producer, but not the nominal one so it will introduce another error.
So this are the passages:- We define the accuracy as:
- Calibration:
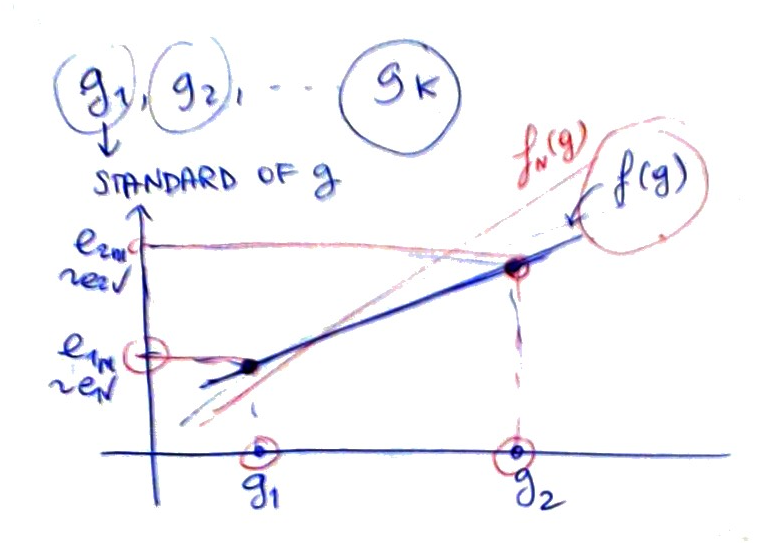
- Non-Linearity Error (only for linear sensors): the maximum distance between the nominal or ideal linear value (, given by the producer), and the real value (, specific to the sensor at hand).
- Rise Time: For first order system we can also define the rise time which is the time needed to the output to pass from 10% of the final value to 90% of the final value
SaM - Sensor Linearization
End Point Linear Approximation & Linear Regression: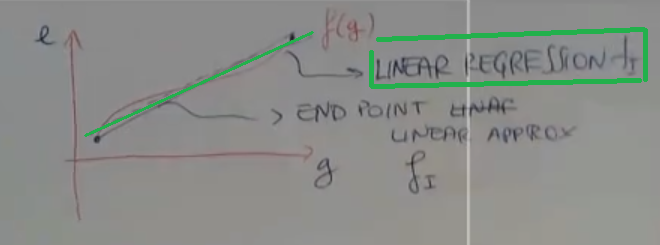
Linearized Sensors for a Small Range: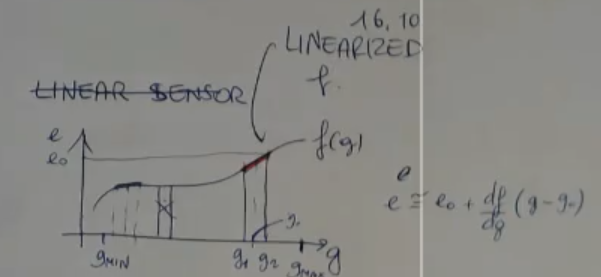
SaM - Ideal Linear Sensor
The ideal sensor is linear. A linear sensor will have constant sensitivity .
An ideal sensor will have a linear dynamic description, with infinite speed:Infinite speed: “no delay between input and output”.
SaM - Definition of Isotropic and Anisotropic Materials
- Isotropic materials exhibit the same mechanical properties in all directions.
- Anisotropic materials, on the other hand, have different mechanical properties in different directions.
SaM - Physical Dependencies of a Sensor
We will see 3 different accelerometer each with a different kind of operational principle:
- Using the ==material properties==: “Charge Accelerometer” (Piezoelectric).
- Using the ==dependency on the geometry==: “Capacitive Accelerometer”.
- Using the ==electromagnetic coupling==: “Magnetic Accelerometer”.