Haptics
La tecnologia aptica è l’ultima frontiera della robotica del grasping e concerne la restituzione all’utente o l’adattamento della presa in funzione delle forze percepite, in altre parole “haptic” significa interazione tattile.
I componenti necessari per tale interazione sono:
- Misura del movimento di una certa parte del corpo tramite una tecnologia appropriata.
- Rilevamento delle Collisioni tramite l’elaborazione della misura, rispetto ad una rappresentazione (virtuale) dell’oggetto.
- Rendering aptico tramite un attuatore per permettere l’acknowledgment e l’effettività dell’azione svolta, restituendo una sensazione reale o stimolata o un display aptico.
In termini matematici si traduce in:
Dove: → è relativo ad una superficie
In generale la quantità di energia scambiata nell’interazione aptica è molto più alta rispetto agli altri tipi di interazione per questo non è un sistema efficace per comunicare. Il tocco è essenzialmente uno scambio di froze e per questo la robotica è il campo giusto da cui sviluppare interfacce aptiche.
Il processo può essere così schematizzato:
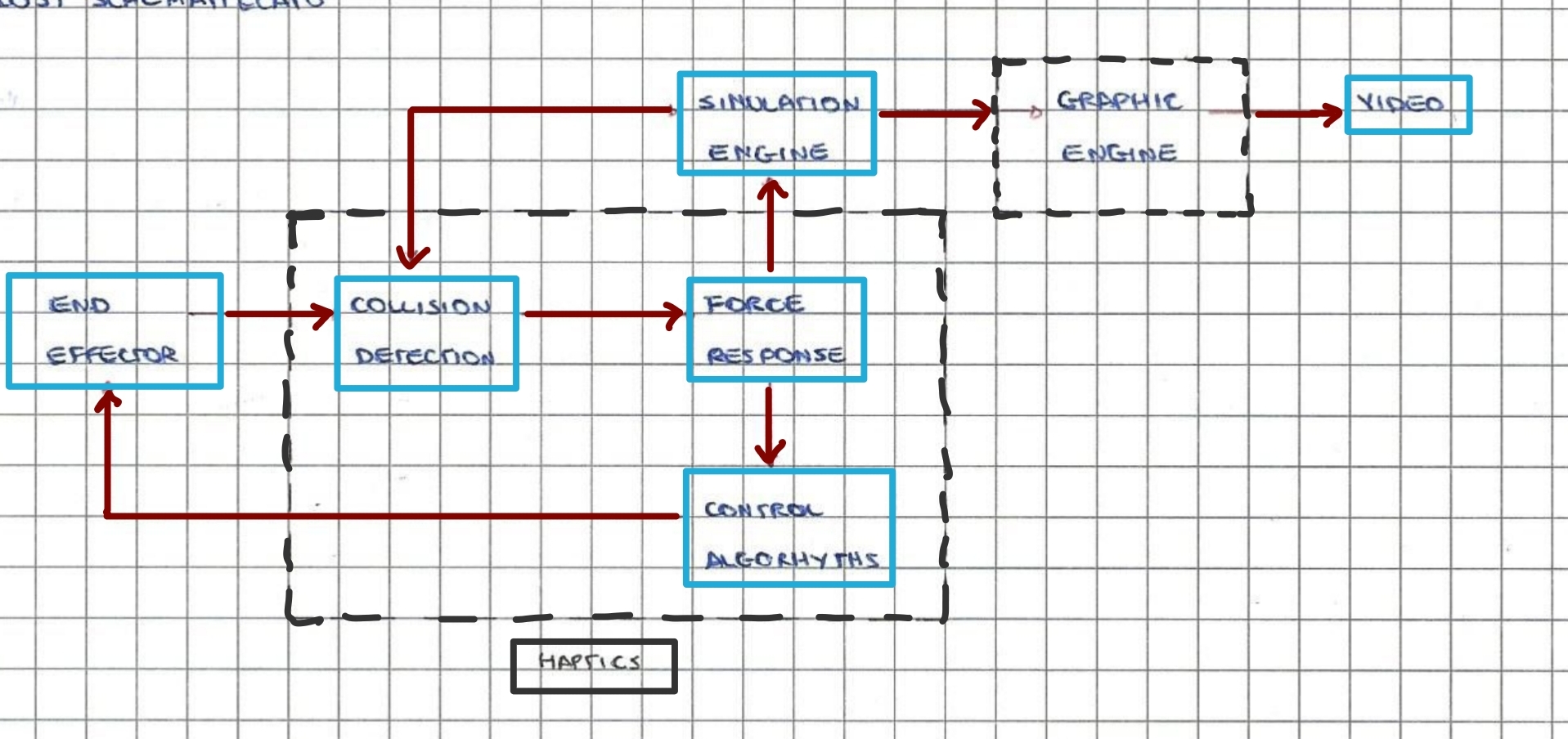 Dove:
→ Il simulation engine è il module che si occupa dello svolgimento di calcoli, al fine di rivelare la collisione (collision detection), e dunque restituire il force response (attraverso l’end effector, manovrato da un control algorithm), e di mostrare a video l’ambiente virtuale (attraverso un graphic engine).
Dove:
→ Il simulation engine è il module che si occupa dello svolgimento di calcoli, al fine di rivelare la collisione (collision detection), e dunque restituire il force response (attraverso l’end effector, manovrato da un control algorithm), e di mostrare a video l’ambiente virtuale (attraverso un graphic engine).