Ricorda:
La transparenza è un concetto legato alla dinamica dell’ambiente composto da un robot che funge da interfaccia utente, ed in questo caso, un simulatore virtuale dell’oggetto e della sua dinamica.
Definizione di Trasparenza: “==Un sistema si definisce trasparente se l’unica dinamica è quella dell’oggetto virtuale==“.
Impedenza: Si definisce impedenza il rapporto tra forza e velocità di un robot:
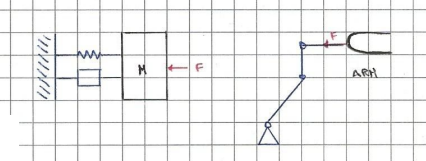
Sistema dinamico di un semplice robot che funge da interfaccia utente:
Di sotto la spiegazionie/passaggi. #NOT_SURE_ABOUT_THIS
Credo che in input sia necessaria soloin quantoviene data dalla controreazione, ovvero da.
Calcoli/Spiegazione del sistema dinamico:
- Partiamo dal segeuente robot:
E definiamo la sua dinamica come:- Applicando la trasformata di Laplace otteniamo:
- Definiamo la dinamica dell’interfaccia: Dove:
- : è il momento torcente complessivo dell’interfaccia.
- : momento torcente applicato dal robot.
- : momento torcente applicato dell’utente, dove è la Jacobiana.
- : è l’attrito viscoso dei joints.
- Applicando nuovamente Laplace a quest’ultima equazione troviamo:
- E definiamo l’impedenza dei joint come:
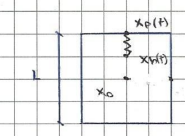
- Ricordando la definizone di data in precedenza, ovvero “la posizione dell’end-effector nell’ambiente virtuale”, la definizione di impedenza data in questa lezione:Ed infine utilizziamo Lapace per scrivere:Quindi, possiamo dire che la dinamica del solo ambiente virtuale è data da:
- La forza totale percepita invece è:
- Facendo gli opportuni calcoli andremo a trovare:
- In fine per ottenere ovvero, avere che l’impedenza percepita è uguale alla sola impedenza virtuale, quindi avere un sistema trasparente, dovremo portare:E ciò è possibile solo azzerando l’ineriza, quindi il peso del braccio e l’attrito dei joints.
==Ovviamente non è possibile portare a il peso del braccio e l’attrito dei joints, possimo solo avvicinarci ad un sistema propiamente trasparente==.
La transparenza è un concetto legato alla dinamica dell’ambiente composto da un robot, che funge da interfaccia utente, e in questo caso, in simulatore virtuale dell’oggetto e della sua dinamica.
Si definisce:
 La dinamica nel simulatore è descrivibile attraverso:Il problema viene affrontato utilizzando la Trasformata di Laplace, la quale permette di transformare equazioni differenziali in algebriche.
La trasformata di Laplace della derivata di una funzione, per condizioni iniziali nulle è la seguente:Si definisce impedenza il rapporto tra forza e velocità dell’oggetto:Quindi possiamo scrivere la formula di prima come:Il problema è che esistono due dinamiche:
La dinamica nel simulatore è descrivibile attraverso:Il problema viene affrontato utilizzando la Trasformata di Laplace, la quale permette di transformare equazioni differenziali in algebriche.
La trasformata di Laplace della derivata di una funzione, per condizioni iniziali nulle è la seguente:Si definisce impedenza il rapporto tra forza e velocità dell’oggetto:Quindi possiamo scrivere la formula di prima come:Il problema è che esistono due dinamiche:
- La dinamica del robot, la quale deve essere impercettibile.
- La dinamica del simulatore, che è quella interessante.
Un sistema si definisce trasparente se l'unica dinamica è quella dell'oggetto virtuale.
Consideriamo ora questo sistema:
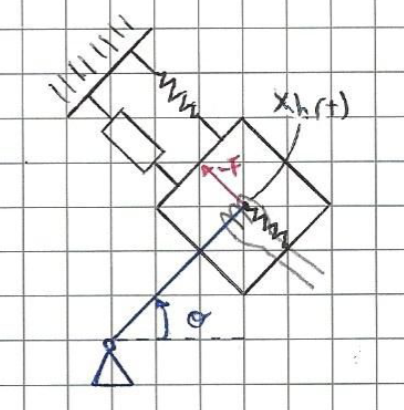 La dinamica reale è data da:Dove:
La dinamica reale è data da:Dove:
- è il momento torcente complessivo dell’interfaccia.
- quello applicato dal robot
- quello dell’utente, dove è la Jacobiana.
- è l’attrito viscoso dei joints.
Applicando Laplace a questa equazione:Dove, possiamo definire l’impedenza dei joint* come:Dunque il sistema dinamico diventa:
Se si assume molto alto, allora: e
In quanto più rigido:In realtà la forza percepita è:Si riprende lo studio dell’effetto complessivo: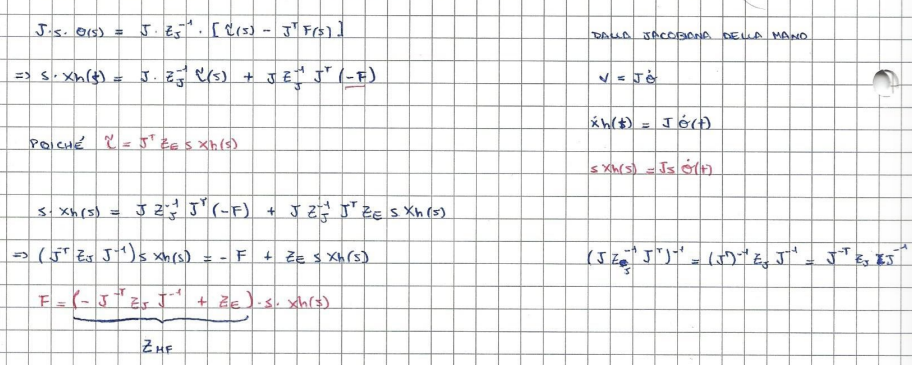 Per ottenere si deve quindi portareE ciò è possobile riducendo l’ineriza, quindi il peso del braccio e l’attrito dei joints.
Per ottenere si deve quindi portareE ciò è possobile riducendo l’ineriza, quindi il peso del braccio e l’attrito dei joints.