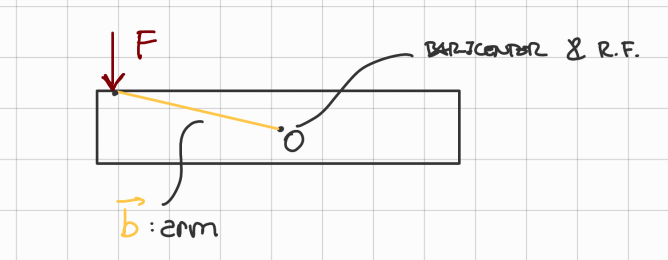
Every force on an object can be represented in the object RF (Reference Frame) usually defined as its barycenter by another Force plus a Torque.
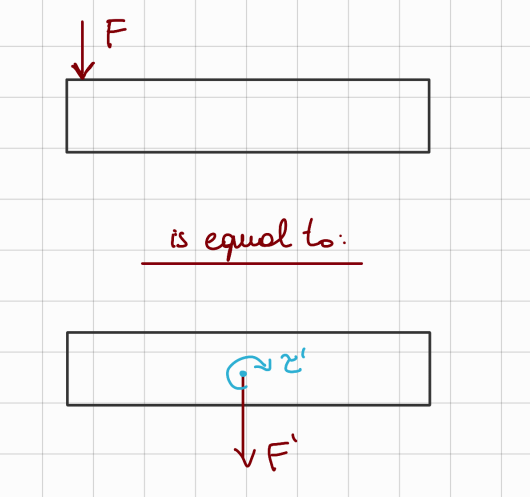
Also every interaction the object has with the world can be summarized by an external Force and an external Moment (or Torque)
- To compute the Torque
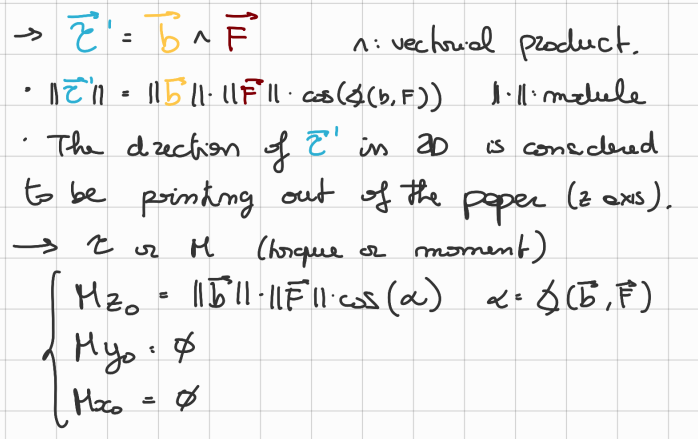
in the RF (reference frame) →
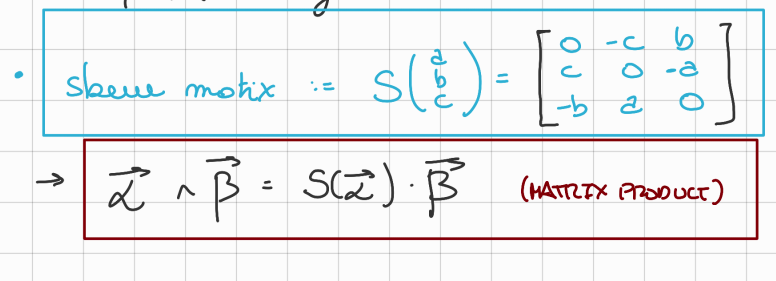
- The vector product can be computed using the Skew Matrix: