HCR - Chain of Joints
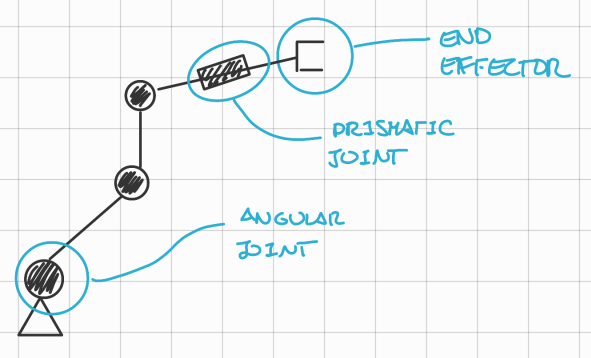
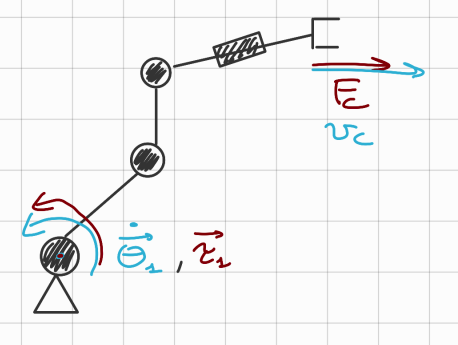
Let’s take a chain of joints:
The generic formula will be:Where:
Link to original
- and : velocity and angular velocity of the end-effector.
- : Jacobian matrix
- : velocity of joint , more specifically:Where:
- : distance of -esim joint from -esim joint.
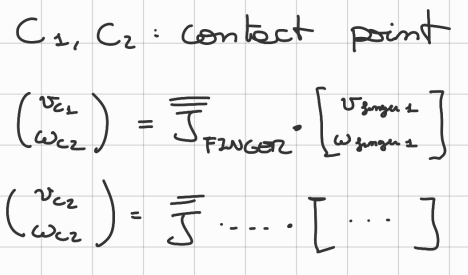
HCR - Chains of Joints that Refers to the Same End-Effector
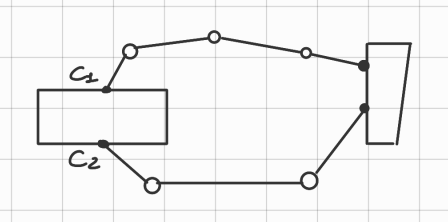
The selection of the contact velocities depends on the model of the contact that we used.
There are 3 main contact models:
- Hard finger with friction
- Hard finger without friction
- Soft finger
We will use the 1-st one (Hard finger with friction)
To understand the difference between the first and the second model let’s consider us holding a pen and wanting to write on a piece of paper:
Link to original
- If the paper is normal (it has friction) I can easily write on it (1-st case)
- If the paper is oily (it has no friction) I cannot write on it, I can only impose a vertical force, I slip away when I apply tangential forces (2-nd case)
- In case of Soft fingers we have reduced control on it, instead of having for its wrench 3 forces and 3 moments we only have 3 forces and 1 moment:
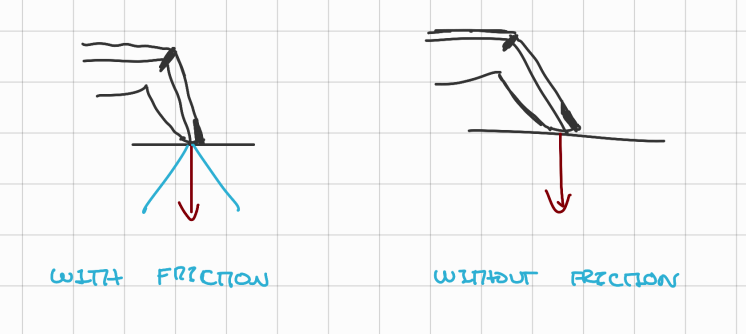
HCR - Hard Fingers
Hard Fingers can be distinguished in 2 classes:
Link to original
- WITH friction (the friction cone exists)
- WITHOUT friction (without friction when manipulating the surface)
HCR - Calculating the Hand Jacobian
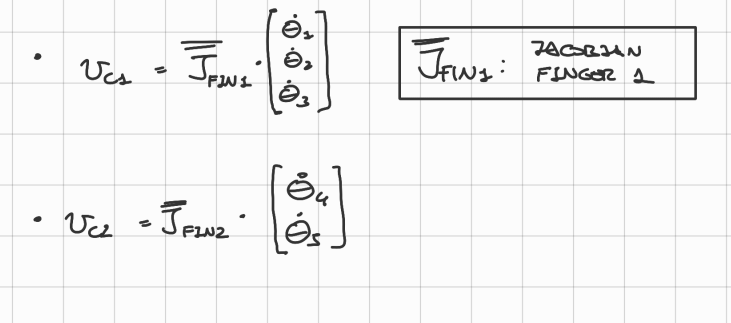
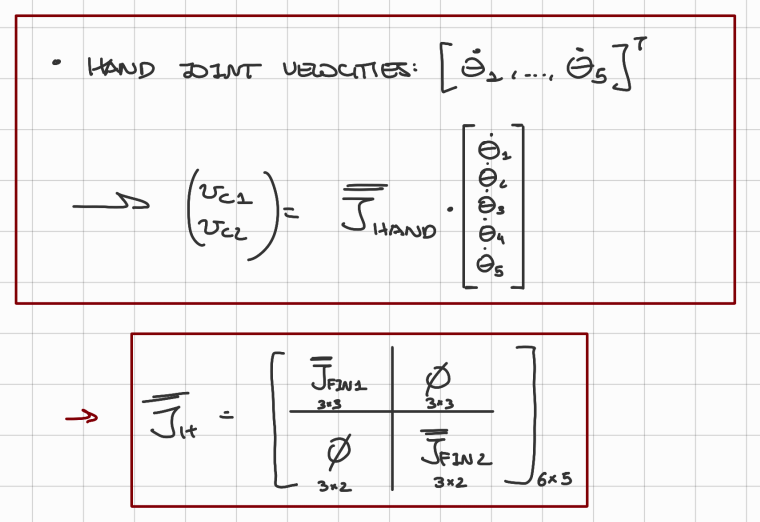
From single kinematic chain Jacobian (or single finger Jacobian) to Hand Jacobian:
Where:
- : joint Finger
- each joint is angular, so it will have an angular velocity
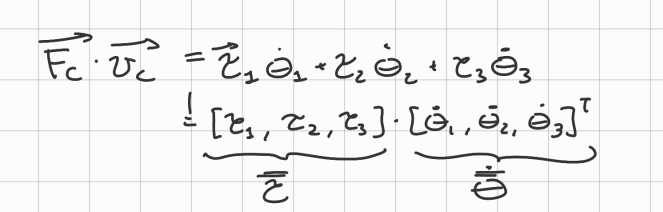
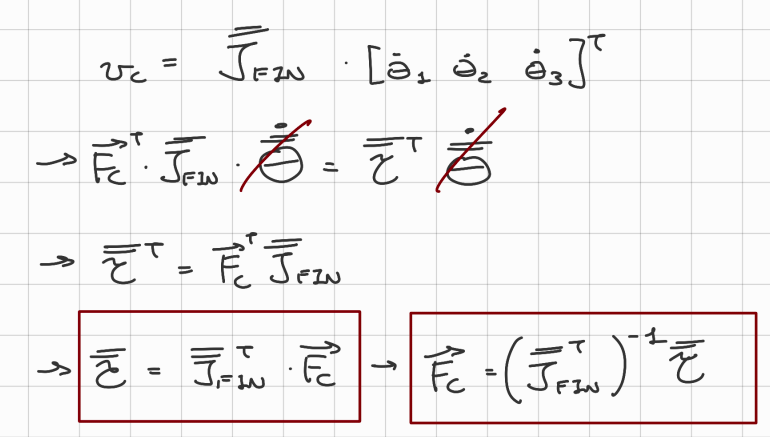
NOTE: The energy at the end-effector is the sum of all the energy expended by the joints. The joints at each point is calculated by the force times the velocity.
Ideally without dissipation of energy we have:
We also know that:
After a rough estimation of the weight and the barycenter of the object, our brain computes the already seen formula:
So our brains has to do a few passages before we move the object at hand:
Link to original
- First it calculates the trajectory (), how I want the object to behave.
- Then it calculates the Grasp matrix, where are my finger on the object
- Lastly it evaluates the forces needed to move the object along the previous thought trajectory
HCR - Solution of a Linear System
A liner system can have:
- 0 solutions
- 1 solutions
- solutions
The forces applied by our brain should belong to the friction cones and if I have only 1 solution for no one guaranties me that one specific solution belongs to the friction cones
Link to original
- It’s much better to have solutions to respect the friction constraints.
HCR - Theorem 'At Least One Solutions for a Grasp Matrix'
We have that the grasp matrix :==Will accepts or infinite solutions if and only if , otherwise it accepts no solutions==. Where:
Link to original
- : rank of matrix
- : rank of matrix
- means that has to have maximum rank.
HCR - Lemma 'Infinite Solutions for a Grasp Matrix'
Continuing from this theorem … If and:
- → solution
- → solutions.
: null space ofLink to originalNOTE: is always in the null space. means that the null space contains other vectors other than
Conclusion
So we desire for a grasp matrix such that:
→ Then we will have solutions for the forces applied at the contact points ().
- Among all the solutions we can find one that satisfies the friction constraints.