Ricorda:
Formule importanti da ricordareDove:
- : velocità angolare dei joints.
- : la matrice Jacobiana.
- : momento torcente.
- : potenza meccanica di un giunto.
- : forza dell’end effector.
- : velocità (lineare) dell’end effector.
Per essere più chiari dato una catena cinematica, del tipo:
Definiamo:
- Il vettore della velocità dell’end-effector come:
- E la Jacobiana come:Dove:
- sono funzioni che descrivono la posizione dell’end-effector in funzione dei parametri dei vari joints, ovvero le loro lunghezze e i loro angoli , in quanto stiamo trattando di joint revoluti la jacobiana sarà sulle derivate degli angoli, di sotto troverete un esempio.
Sempre guardando il precedente esempio, per cambiare il sistema di riferimento, portando l’end-effector in riferimonto all’origine/‘world reference’ prima definiamo come cambiamo il sistema di riferimento, ovvero rotazioni e traslazioni per portare il vettore dell’end-effector da , quindi:Dopodichè definiamo i vari vettri e matrici:Dopo tutti i calcoli otteremo:
NOTE:IMPORTANTENOT_SURE_ABOUT_THIS
Da rivedereIn realà fare così non del tutto corretto, sarebbe necessario prima definire le ‘homogeneous transformation matrices’ e poi calcolare la posizione dell’end-effector con quelle. Quindi, se volessimo usare le trasformation matrices, potremmo definire:Dove:Infine per trovare sapendo calcoliamo:Ricorda che c’è un modo semplice per calcolare l’inversa di una transformation matrix
In generale un manipolatore robotico è un braccio robotico, ed in genere si rappresenta così: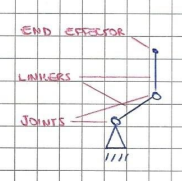 Esso è generalmentee composto da linkers, i quali sono copri rigidi, e da joints, i quali contengono meccanismi che permettono il moviemetno relativo tra i linkers.
Esistono due categorie di joints:
Esso è generalmentee composto da linkers, i quali sono copri rigidi, e da joints, i quali contengono meccanismi che permettono il moviemetno relativo tra i linkers.
Esistono due categorie di joints:
- Joints Prismatici: i quali permettono una traslazione.
- Joints Revoluti: i quali permettono una rotazione.
Entrambi i tipi di joints conferiscono 1 grado di libertà al manipolatore.
L’insieme di linkers a di joints formano una catena cinemantica che in questo caso è aperta, mentre, se il manipolatre operasse un oggetto si diretta connessa.
L’interesse principale della cinematica diretta è quello di stabilire a priori la posizione dell’end effector, data una sequenza di comandi espressi sotto forma di angoli (si considerano solo joints revoluti). Più utile è la cinenamtica inversa per cui, a partire dalla posizione che si vuole raggiungere, si determina la sequenza di comandi necessari ma è molto più complessa e non verra trattata.
In generale, secondo tale configurazione, la posizione dell’end effector può essere espressa come:Dove:Possiamo poi calcolare :Ed infine possiamo scrivere il vettore rispetto al sistema di riferimento :In questo caso si poteva arrivare al risultato anche attraverso la trigonometria, ma nel caso tridimensionale, si può procedere solo in questo modo e si fa uso della convenzione delle tavole di Denavit-Hartenberg (Wikipedia: ‘Convenzione di Denavit-Hartenberg)
Oltre alla posizione e all’orientamento dell’end effector, spesso si controlla anche la sua velocità, espressa in funzione della velocita dei joints, quindi dato:Possiamo scrivere la velocità come:Dove:
- è la velocità lineare.
- sono le velocià angolari dei giunti revoluti.
- è una jacobiana analitica, ovvero:E dove:
A partire da ciò si può stabilire la forza esercitata sull’end effector, conoscendo i momenti torcenti dei joints e la loro potenza: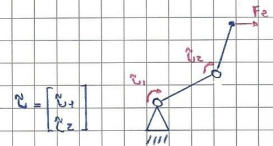 Dove:
Dove:
- : potenza meccanica di un giunto, con:
- : momento torcente .
- : velocità angolare.
- : forza dell’end effector.
- : velocità (lineare) dell’end effector.
- NOT_SURE_ABOUT_THIS
Abbiamo introdotto questa formula come se potessimo facilmente stabilire la forza sull'end effector conosendo i momenti torcenti dei joints, ma abbiamo trovato il contrario, ovvero i momenti torcenti data la forza dell'end effector, questa cosa non ha molto senso. - NOT_SURE_ABOUT_THIS
Quindi per trovare la forza dell'end effector, dovremo usare la suguente formula??? Non so se è corretta: