Ricorda:
Dati i bracci del manipolatore, costruire le screw matrices, per ogniuno di loro:
~Ex.:
Bracci (come definire i bracci o joints di un manipolatore):Jacobiana della mano:Se la forza che vogliamo applicare appartiene al kernel di questa matrice , allora non è possibile per il manipolatore, applicare questa forza all’oggetto.
Nello studio del problema del grasping non si modellerà e lavorerà con il braccio ma con la mano dal momento che l’azione del “grasp” non richiede sono di gestire contemporaneamente le dita ma anche di farle collaborare. Inoltre i bracci robotici non sono di interesse al momento che non è difficile reperirli sul mercato, a differenza delle mani, dove ogni dito può essere pensato come un braccio robotico e l’obbiettivo è quello di muovere oggetti/solidi.
Molte aziende di logistica, come ‘Amazon’, investono in questo per poter automatizzare l’intero processo prima del transporto. Se il controllo è centralizzato il controllore gestisce tutto ma si parla di collaborazione se si hanno più controllori indipendenti.
L'azione di manipolazione è divisibile in 3 parti:
- Avvicinamento all’oggetto.
- Instaurazione del contatto ed interazione.
- Movimento dell’oggetto.
Ci si concentrerà principalmente sulle ultime due e si studieranno tramite metodi e modelli algebrici e non ci si baserà su architetture specifiche. Innanzitutto bisogna distinguere tra i due tipi di grasping:
- ==Grasping di potenza==: dove l’obbiettivo è il movimento statico degli oggetti.
- ==Grasping di precisione==: che permette il movimento relativo tra l’oggetto ed il palmo, evitando il movimento del braccio.
Il controllo è dato dai polpastrelli delle dita in modo che se ne possano sfruttare i gradi di libertà.
L’interazione con un oggetto è data dalle forze esercitate dalle singole dita, infatti posizione e velocità degli oggetti sono conseguenze di queste forze, ma ricordiamo che dipende anche dal modello del contatto.
Si consideri un sistema composto da due dita:
- : momenti torcenti dei joints.
- : forze esercitate dall’end effector, queste forze come si può vedere dalla figura, sono dovute ai momenti torcenti dei joints.
==Poiché le due devono collaborare, non si possono usare due Jacobiane distinte, ma bisogna ricondursi ad’unica matrice==, cioè bisogna pensare al tutto come un unico robot con due catene cinematiche. In generale data una forza appicata ad un braccio , il procedimento per il calcolo del movimento torcente può essere “compresso” attraverso la screw matrix:Dove:Mentre la direzione del vettore è data dalla regola della mano destra. Tale matrice può essere utilizzata per qualsiasi prodotto vettoriale.
Siano date le forze di contatto ed i momenti torcenti nei singoli joints, si vuole stabilre una relazione che li leghi direttamente:Inoltre da ciò che si è visto:Da cui si ottiene:Dove:
- o è un vettore o più in generale una sottomatrice composta di soli .
- è il vettore di velocità dell’end effector.
- è la Jacobiana, ed distinguono le due Jacobiane legate alle due catena cinematiche dell’esempio.
- è la velocità angolare.
- E la matrice:È la Jacobiana della mano (una matrice ), e la sua trasposizione è quella usata per le forze.
La potenza di contatto è data dalla somma delle potenze joints singoli, infatti la forza sull’end effector corrisponde ai momenti torcenti nei joints e la velocità lineare a quelle angolari:Quindi in generale:Dove:
- : è la potenza di contatto.NOT_SURE_ABOUT_THIS
è il momento torcente,è la velocità angolare, eè la potenza meccanica di un giunto, questo \tau NON è la potenza di contatto, è il vettore che rappresenta i momenti torcenti dei due giunti - : forza dell’end effector.
Nel caso proposto si avrebbe che:
#NOT_SURE_ABOUT_THIS Come è possibile definire la jacobiana in questo modo???
Dove:
- Le dimensioni della jacobiana sono quindi:NOT_SURE_ABOUT_THIS
interpretazione miaDove:- : numero di joints.
- : numero di contact points.
- Inoltre per capire meglio ecco una Jacobiana con 3 contact points e 5 joints:NOT_SURE_ABOUT_THIS
interpretazione mia:Ricorda che
Ma dal momento che le forze hanno sempre il compoenente nullo, mentre al più l’ultimo elemento delle prime due righe di non sono nulli, allora l’unico componenete non nullo di è , come suggerisce la fisica: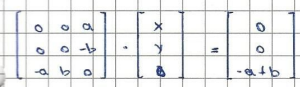 Dunque il risultato precedente può essere così ridotto:
Dunque il risultato precedente può essere così ridotto: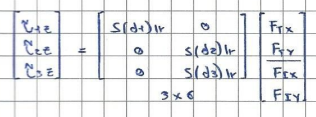
In generale la Jacobiana cambia in base alla configurazione del manipolatore (posizione links) e in base agli end effectors, i quali a loro volta dipendono da come viene afferrato un oggetto.
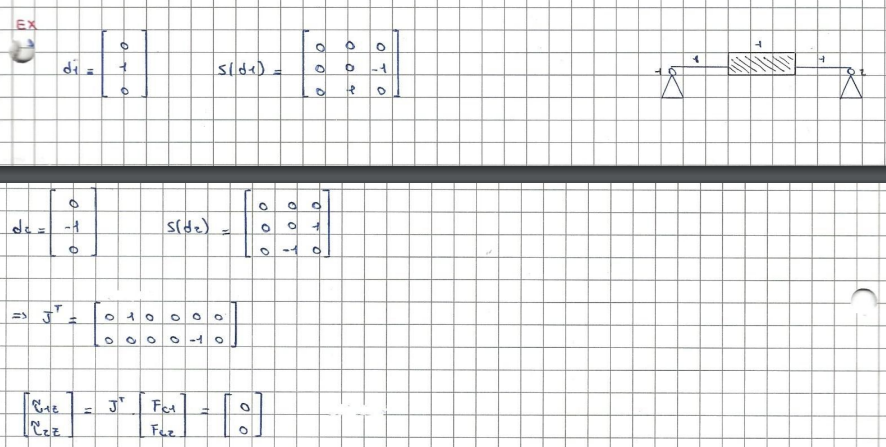
~Ex.: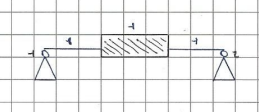 Definiamo i bracci del manipolatore: Quindi, definiamo le rispettive screw matricies:Definiamo la Jacobiana:
Definiamo i bracci del manipolatore: Quindi, definiamo le rispettive screw matricies:Definiamo la Jacobiana:
NOT_SURE_ABOUT_THIS Come è possibile definire la jacobiana in questo modo??? In questo problema di questa configurazione consiste nell’impossibilità di stringere (squeeze) gli oggetti.
- N.B.: La prima e quarta colonna sono uguali a , queste colonne corrispondono alle componenti di entrambe le forze ed .
- Da questo esempio emerge il concetto di kernel di una matrice, ==in particolare (la forza) appartiene al kernel di == dal momento che: E ciò vale per le forze direzionate lungo i link (push/pull) e lungo .
In altre parole i kernel sono tutte le forze che sono resistite non attraverso un momento torcente ma attraverso i vincoli meccanici dei joints.
In conlusione:NOT_SURE_ABOUT_THIS Conclusioni pesonali
- Se la forza che vogliamo imporre all’oggetto tramite il manipolatore, in questo caso per esempio una coppia di forze:E questo vettore appartiene al kernel di , allora non esiste nessuna combinazione/valore di che permetta al robot di imporlo, in questo caso il robot non è in grado di tenere fermo l’oggetto applicando due forze uguale e contrarie lungo l’asse dell’oggetto, basta vedere il disegno per capirlo.
- Esempio Originale (si usa una jacobiana ridotta, mi sembrava non troppo chiaro): NOT_SURE_ABOUT_THIS
Inoltre la seguente definizione dei bracci non rispetta quello che è stato detto precedentemente:come definire i bracci o joints di un manipolatore,ma la screw matrix la rispetta- ~Ex.:
In questo problema di questa configurazione consiste nell’impossibilità di stringere (squeeze) gli oggetti. - Da questo esempio emerge il concetto di kernel di una matrice, in particolare è kernel di dal momento che: E ciò vale per le forze direzionate lungo i link (push/pull) e lungo .
In altre parole i kernel sono tutte le forze che sono resistite non attraverso un momento torcente ma attraverso i vincoli meccanici dei joints.
- ~Ex.: