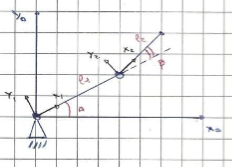
Inizia dalla base del manipolatore, il primo joint (o braccio) sarà:d1=x1y1z1 Spostati alla fine del primo joint/inizio del secondo joint, e definiamo:d2=x2y2z2 E così via…