Ricorda:
#NOT_SURE_ABOUT_THIS Tutto quello che dirò in questo segmento è basato su idee e conclusioni personali, niente di tutto ciò è stato revisionato dal professore
Componente Normale della Forza:Dove:
- è il modulo della componente normale e il vettore normale alla superficie.
NOT_SURE_ABOUT_THIS Probabilmente è il versore normale alla superficie.
Componente Tangente o Trasverso della Forza:
Partendo dalla formula trovata in precedenza:Definiamo il “coefficente elastico dell’interfaccia aptica” ( : haptic), e cambiamo leggermente la precedente formula in:Che rappresenta la forza esercitata per muovere l’oggetto virtuale e di conseguenza la forza reattiva esercitata dagli attuatori sulle dita sarà:(Ovvero l’opposto)
Algoritmo di Force Feedback:
- Setup
- Partiamo sapendo la posizione , e il triangolo/piano che stiamo toccando.
- Troviamo come abbiamo visto precedentemente.
- Troviamo : la forza reattiva esercitata sull’end-effector, usando la seguente formula:Dove: è un coefficente elastico stiamato dell’oggetto, se l’oggetto è rigido sarà più alto, se l’oggetto è morbido sarà più basso.
- Vediamo ora come possiamo descrivere l’evoluzione della posizione dell’end-effector nel discreto:
- Se l’oggetto è rigido, ovvero non è deformabile, avremo che , possiamo dire:Mentre se l’oggetto è deformabile, averemo che la posizione dell’end-effector nel mondo virtuale cambierà in base alla posizione che assume nel mondo reale , maggiori spiegazioni su queste variabili di seguito:Dove, prendiamo l’esempio di un gioco in realtà virtuale:
- : rappresenta la posizione che vediamo nello schermo/mondo virtuale della mano/end-effector.
- : la posizione nel mondo reale della mano/end-effector.
- : il punto a distanza minima del triangolo/piano dell’oggetto con cui stiamo interagendo ed (definizione data precedentemente).
- : è il coefficiente elastico dato per restituire un force feedback all’utente, sulla base di ed .
- : è il coefficiente elastico che viene definito per deformare l’oggetto virtuale, data (il force feedback).
- Definiamo e definiamo inoltre un tale per cui: Dove, nella simulazione può essere fissato stimando quello reale, ma è diverso da quello dell’interfaccia aptica (), quindi possiamo dire che:Dunque avremo che:
• La forza necessaria per ottenere una deformazione è:• Mentre la forza che resituiremo in feedback all’utente è pari a:Dove:
- Per corpi rigidi, e in quanto non si deve avere una deformazione, ovvero per , per deformare un corpo rigido sarebbe necessaria una forza infinita, ma ovviamente per non far male all’utente, (non possiamo rispondere con una forza troppo alta) quindi è necessario rispondere con una forza finita (ricorda che la forza reattiva è ).
- Per corpi morbidi, e , e , allora avremmo lo stesso spostamento per entrambe.
Si consideri l’implementazione di questi risultati per creare un simulatore, innanzitutto è necessario costruire un sistema a controreazione che sia asintoticamente stabile:
Ovvero:Si ha un polo in che deve essere stabile, dunque:Per stabilità si intende che: ==al tocco di un oggetto virtuale, la parte di superficie coinvolta si stabilizza ad un certo valore==. In realtà il sistema non ha dinamica ma la assume in simulazione, dal momento che i calcolatori campionano e aggiornano il sistema secondo diversi valori della forza Come si può vedere in oltre se il corpo è rigido, ergo per avremo che ovvero non penetremo la superficie iniziale (in quanto non deformabile)
Finora si è trascurato l’attrito in quanto la forza applicata si assumeva perpendicolare alla superficie dunque la forza tangente è nulla. Tenendo conto dell’attrito, data una forza non diretta lungo la normale, la forza reattiva, la quale è esattametne uguale e opposta, deve ricadere nel cono d’attrito. Essa dunque è esprimibile come la somma dei componenti normale e tangente alla superficie:Dove:
- è il modulo della componente normale e il vettore normale:

- Come possiamo vedere o deve ricadere nel cono di attrito, altrimenti l’oggetto scivolerebbe dalla presa, nel caso in cui non ha componenti tangenti, avremo che ricadrà per forza nel cono di attrito.
In questo caso invece con non è detto.
- Come possiamo vedere o deve ricadere nel cono di attrito, altrimenti l’oggetto scivolerebbe dalla presa, nel caso in cui non ha componenti tangenti, avremo che ricadrà per forza nel cono di attrito.
Da (forza normale + forza tangente):
Secondo l’algoritmo di rendering avremo che:
- : è la forza reattiva esercitata dagli attuatori sulle dita.
- : è la forza esercitata per muovere l’oggetto virtuale.
- : stima del coefficente elastico reale.
- : coefficente elastico dell’interfaccia aptica ( : haptic)
- Un esempio sono: e , forze uguali e contrarie.
- NOT_SURE_ABOUT_THIS
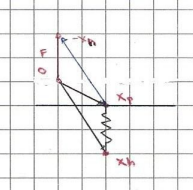
Non riesco a capire questa figura, l'origne (O) non è sull'oggetto??? La distanzacosa vuol dire? E la distanzaè per caso la deformazione??? - NOT_SURE_ABOUT_THIS
Conclusioni/Spiegazione trovata arbitrariamente, non verificata- Partiamo sapendo la posizione , e il triangolo/piano che stiamo toccando.
- Troviamo come abbiamo visto precedentemente.
- è la forza reattiva esercitata sull’end-effector, trovata usando la seguente formula: Dove: è un coefficente elastico stimato dell’oggetto, se l’oggetto è rigido sarà più alto, se l’oggetto è morbido sarà più basso.
- L’origine e la posizione è la posizione passata/precendete dell’end-effector.
Si consideri un oggetto rigido e si rappresenti il punto di contatto come una sfera di raggio nullo: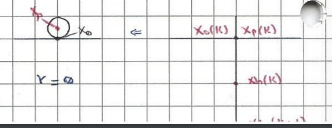 Cioè:Allora e non dipende da in quanto la superficie è non deformabile e l’oggetto è statico.
Cioè:Allora e non dipende da in quanto la superficie è non deformabile e l’oggetto è statico.
Si consideri ora un oggetto deformabile:(Con una funzione qualsiasi)
Il modello più semplice per gli oggetti deformabile è la molla: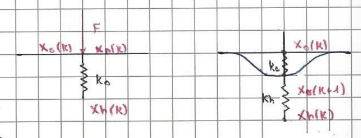 Per capire la figura:NOT_SURE_ABOUT_THIS
Per capire la figura:NOT_SURE_ABOUT_THIS Di sotto si trovano tutte spiegazioni che mi sono dato, non sono verificate e probabilemente sbagliate.
- Nella prima figura definiamo , in quanto abbiamo considerato una sfera di raggio nullo.
- Nel secondo caso, andimo a deformare l’oggetto, quindi avremo uno spostamento del vettore , ovvero , vediamo ora come definire questo spostamento
Definiamo e definiamo inoltre un tale per cui: Dove nella simulazione può essere fissato stimando quello reale della deformazione ma è diverso da quello dell’interfaccia aptica (), quindi possiamo dire che:Dunque la forza necessaria per ottenere tale deformazione è:Dove:
- Per corpi rigidi, e in quanto non si deve avere una deformazione, ovvero per , per deformare un corpo rigido sarebbe necessaria una forza infinita, ma ovviamente per non far male all’utente, (non possiamo rispondere con una forza troppo alta) quindi è necessario rispondere con una forza finita (ricorda che la forza reattiva è ).
- Per corpi morbidi, e , e , allora avremmo lo stesso spostamento per entrambe.
Si consideri l’implementazione di questi risultati per creare un simulatore, è necessario costruire un sistema a controreazione che sia asintoticamente stabile:
Ovvero:Si ha un polo in che deve essere stabile, dunque:Per stabilità si intende che: ==al tocco di un oggetto virtuale, la parte di superficie coinvolta si stabilizza ad un certo valore==. In realtà il sistema non ha dinamica ma la assume in simulazione, dal momento che i calcolatori campionano e aggiornano il sistema secondo diversi valori della forza. Come si può vedere in oltre se il corpo è rigido, ergo per avremo che ovvero non penetremo la superficie iniziale (in quanto non deformabile)