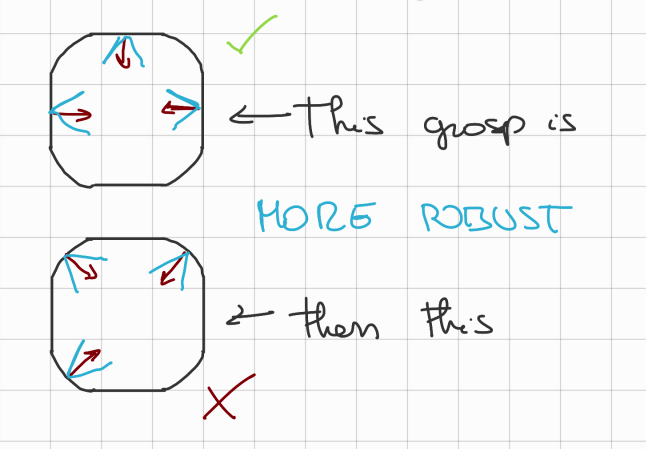
Suppose we posses an object and we want to find the best possible grasp between this two configurations:
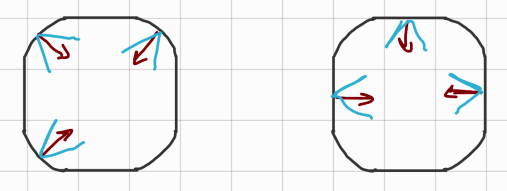
We look at the normal of the surface at the contact points:
- Notice how if the contact points in the first case change a little the normal changes a lot.
- While in the second case if we change the contact points a little (or we perturbate them) the normal does not change at all:

So we can say: