Stability and Instability
Real World: Continuous Time Computer: Discrete Time (Determined by the CPU Clock)
HCR - What are Haptics
Haptics
La tecnologia aptica è l’ultima frontiera della robotica del grasping e concerne la restituzione all’utente o l’adattamento della presa in funzione delle forze percepite, in altre parole “haptic” significa interazione tattile.
I componenti necessari per tale interazione sono:
- Misura del movimento di una certa parte del corpo tramite una tecnologia appropriata.
- Rilevamento delle Collisioni tramite l’elaborazione della misura, rispetto ad una rappresentazione (virtuale) dell’oggetto.
- Rendering aptico tramite un attuatore per permettere l’acknowledgment e l’effettività dell’azione svolta, restituendo una sensazione reale o stimolata o un display aptico.
In termini matematici si traduce in:
Dove: → è relativo ad una superficie
In generale la quantità di energia scambiata nell’interazione aptica è molto più alta rispetto agli altri tipi di interazione per questo non è un sistema efficace per comunicare. Il tocco è essenzialmente uno scambio di froze e per questo la robotica è il campo giusto da cui sviluppare interfacce aptiche.
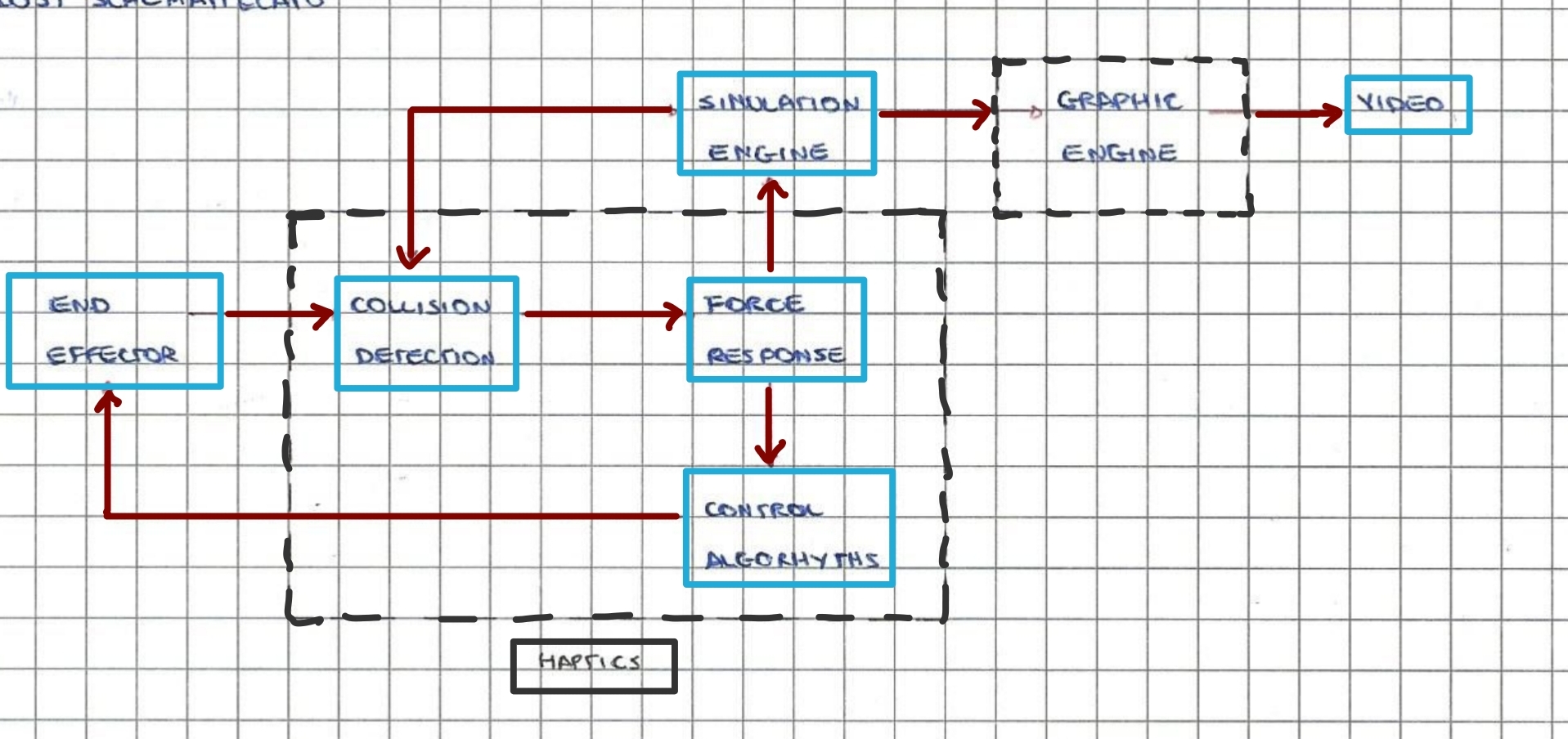
Il processo può essere così schematizzato:
Link to originalDove: → Il simulation engine è il module che si occupa dello svolgimento di calcoli, al fine di rivelare la collisione (collision detection), e dunque restituire il force response (attraverso l’end effector, manovrato da un control algorithm), e di mostrare a video l’ambiente virtuale (attraverso un graphic engine).
HCR - Instability in Haptics
Link to original
- The Discrete Time introduced a delay, you read and then act after 1 tic (1 tic of the CPU Clock), increased if there is a feedback loop.
- If the delay is too big you cannot use haptics, it breaks the “immersion”
- We want the most realistic haptics (closest to reality as possible)
- The delay should be (the human body cannot recognize a delay lesser than this)
Position of z_b i make the difference between z_b - z_a at D.T. k_h,
HCR - Force Response for Haptic Control
Consideriamo un oggetto (tenendo conto dell’attrito), ed una forza non diretta lungo la normale, la forza reattiva, la quale è esattamente uguale ed opposta, deve ricadere nel cono d’attrito.
Essa dunque è esprimibile come la somma dei componenti normale e tangente alla superficie:Dove:
- è il module della componente normale ed il vettore normale
Quindi, sapendo che:
Dove:
- è la matrice di identità.
- : vettore forza completo.
- : vettore forza con versore definito dalla normale.
- : vettore forza con versore definito dalla perpendicolare della normale.
Secondo l’algoritmo di rendering, definiamo la forza reattiva esercitata dagli attuatori sulle dita come:
E di conseduenza possiamo definire la forza esercitata per muovere l’oggetto virtuale:
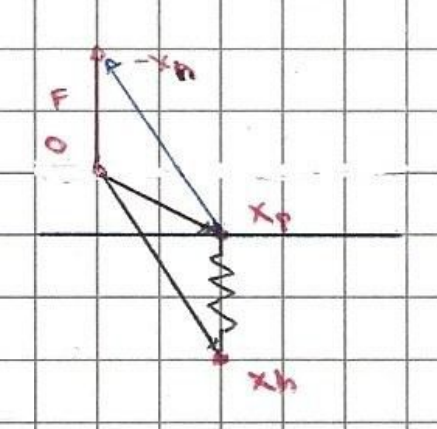
Nelle formule sopra riportate e nella segeunte figura si definisce:
- : coefficiente elastico deciso arbitrariamente (trasforma il discostamento tra ed in una forza)
- : proxy point (dove si trova la mano nella realtà virtuale che sta toccando l’oggetto) all’istante
- : human point (dove si trova realmente la mano dell’utente) all’istante
Vengono definiti: , ed l’algoritmo per calcolarli qui. Per un contesto più generale, riguarda la lezione sul ‘rendering aptico’.
- ~Ex.:
- Oggetto deformabile e non-deformabile:
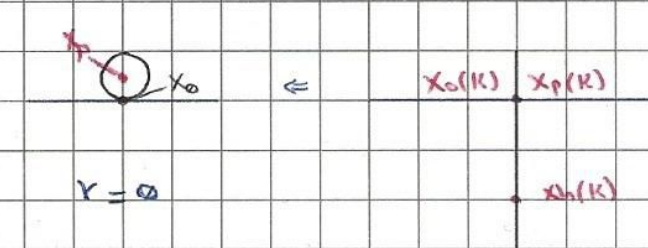
- Si consideri ora un oggetto rigido (non-deformabile) e si rappresenti il punto di contatto come una sfera di raggio nullo, cioè :
- Allora e non dipende da in quanto la superficie è non deformabile e l’oggetto è statico.
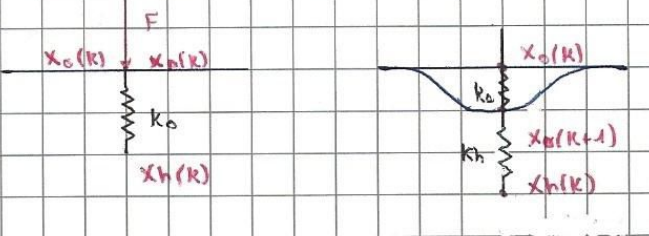
- Si consideri ora un oggetto deformabile:Il modello più semplice per gli oggetti deformabili è una molla:
Per la quale .
Dove nella simulazione può essere fissato stimando quello reale della deformazione ma è diverso da quello dell’interfaccia aptica.Dunque la forza necessaria per ottenere tale deformazione è: Dove:
- Per corpi rigidi: ,
- Mentre per corpi morbidi: , , e (stesso spostamento per entrambe)
Link to original
- Diagramma per il Force Response
- Si consideri l’implementazione di questi risultati per creare un simulatore: è necessario costruire un sistema a controreazione che sia asintoticamente stabile.
Si ha un polo in che deve essere stabile, dunque:Per stabilità si intende che al tocco di un oggetto virtuale la parte di superficie coinvolta si stabilizza per un certo valore.
In realtà il sistema non ha dinamica ma la assume in simulazione dal momento che i calcolatori compiono ed aggiornano il sistema secondo diversi valori della forza.