Consideriamo un oggetto (tenendo conto dell’attrito), ed una forza non diretta lungo la normale, la forza reattiva, la quale è esattamente uguale ed opposta, deve ricadere nel cono d’attrito.
 Essa dunque è esprimibile come la somma dei componenti normale e tangente alla superficie:Dove:
Essa dunque è esprimibile come la somma dei componenti normale e tangente alla superficie:Dove:
- è il module della componente normale ed il vettore normale
Quindi, sapendo che:
Dove:
- è la matrice di identità.
- : vettore forza completo.
- : vettore forza con versore definito dalla normale.
- : vettore forza con versore definito dalla perpendicolare della normale.
Secondo l’algoritmo di rendering, definiamo la forza reattiva esercitata dagli attuatori sulle dita come:
E di conseduenza possiamo definire la forza esercitata per muovere l’oggetto virtuale:
Nelle formule sopra riportate e nella segeunte figura si definisce: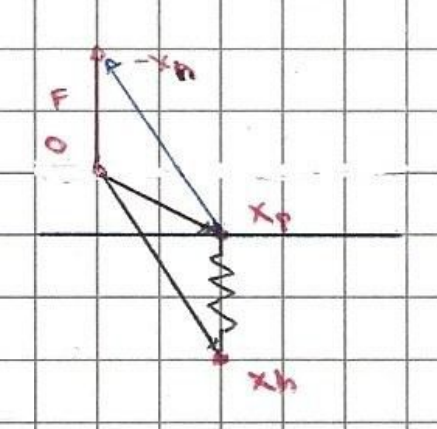
- : coefficiente elastico deciso arbitrariamente (trasforma il discostamento tra ed in una forza)
- : proxy point (dove si trova la mano nella realtà virtuale che sta toccando l’oggetto) all’istante
- : human point (dove si trova realmente la mano dell’utente) all’istante
Vengono definiti: , ed l’algoritmo per calcolarli qui. Per un contesto più generale, riguarda la lezione sul ‘rendering aptico’.
- ~Ex.:
- Oggetto deformabile e non-deformabile:
- Si consideri ora un oggetto rigido (non-deformabile) e si rappresenti il punto di contatto come una sfera di raggio nullo, cioè :
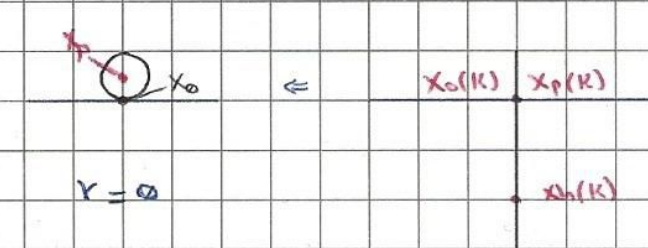
- Allora e non dipende da in quanto la superficie è non deformabile e l’oggetto è statico.
- Si consideri ora un oggetto deformabile:Il modello più semplice per gli oggetti deformabili è una molla:
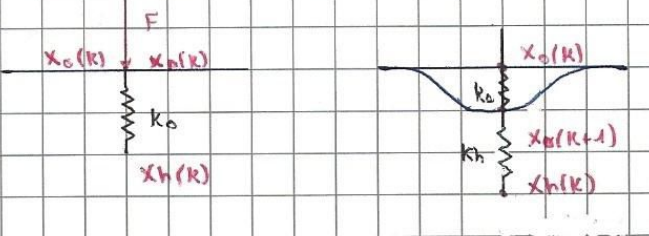
Per la quale .
Dove nella simulazione può essere fissato stimando quello reale della deformazione ma è diverso da quello dell’interfaccia aptica.Dunque la forza necessaria per ottenere tale deformazione è: Dove:- Per corpi rigidi: ,
- Mentre per corpi morbidi: , , e (stesso spostamento per entrambe)
- Si consideri ora un oggetto rigido (non-deformabile) e si rappresenti il punto di contatto come una sfera di raggio nullo, cioè :
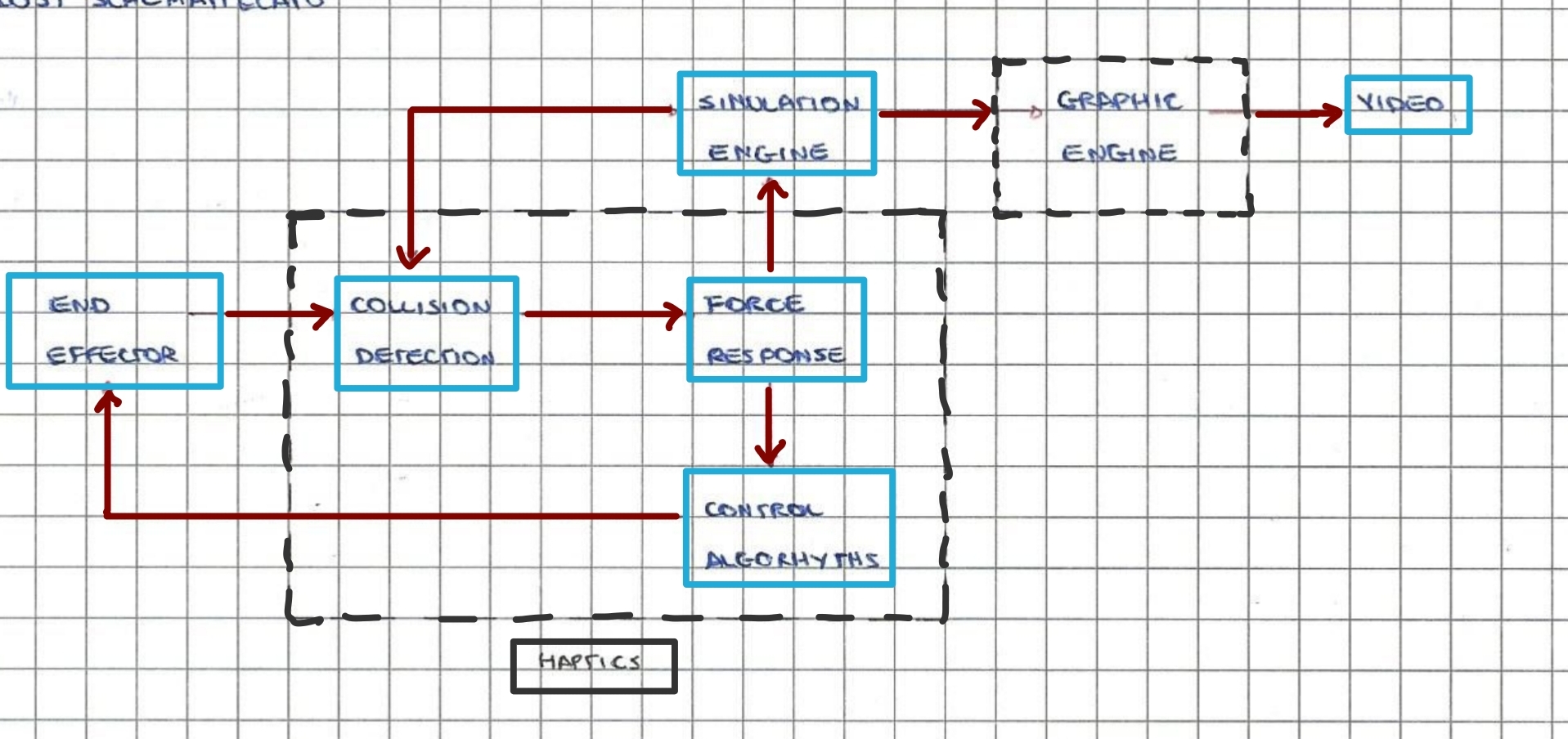
- Diagramma per il Force Response
- Si consideri l’implementazione di questi risultati per creare un simulatore: è necessario costruire un sistema a controreazione che sia asintoticamente stabile.
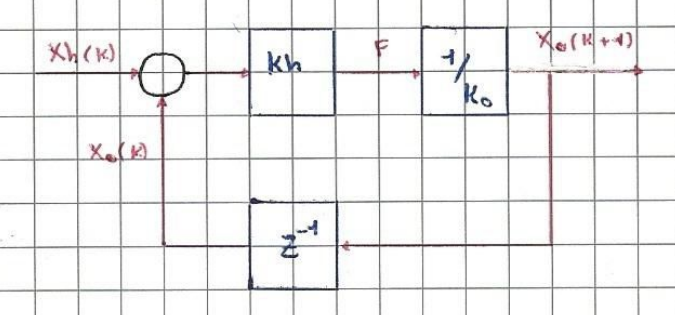 Si ha un polo in che deve essere stabile, dunque:Per stabilità si intende che al tocco di un oggetto virtuale la parte di superficie coinvolta si stabilizza per un certo valore.
Si ha un polo in che deve essere stabile, dunque:Per stabilità si intende che al tocco di un oggetto virtuale la parte di superficie coinvolta si stabilizza per un certo valore.
In realtà il sistema non ha dinamica ma la assume in simulazione dal momento che i calcolatori compiono ed aggiornano il sistema secondo diversi valori della forza.
- Si consideri l’implementazione di questi risultati per creare un simulatore: è necessario costruire un sistema a controreazione che sia asintoticamente stabile.