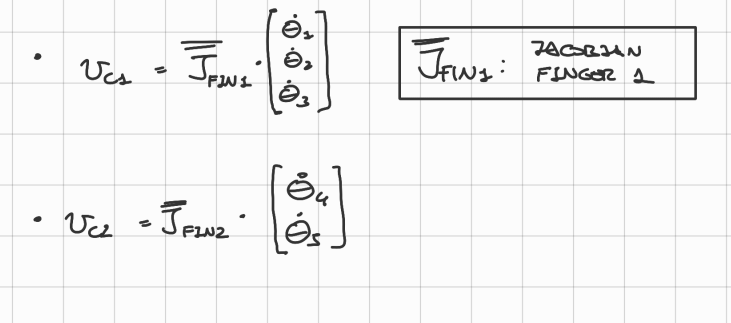
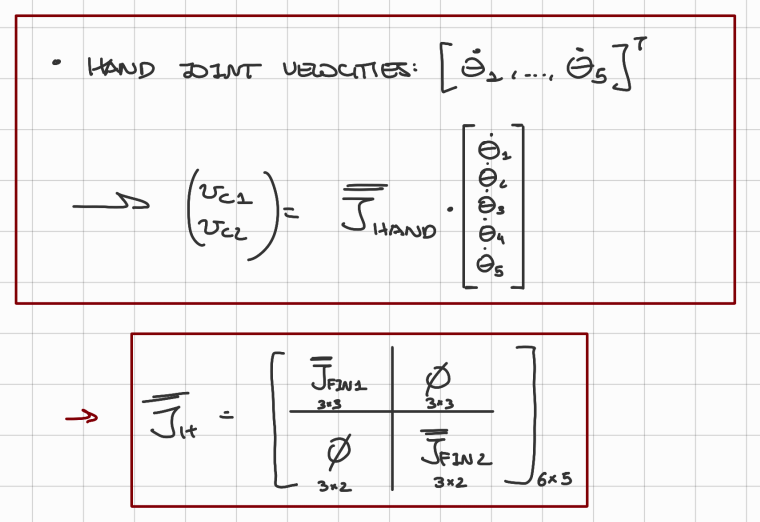
From single kinematic chain Jacobian (or single finger Jacobian) to Hand Jacobian: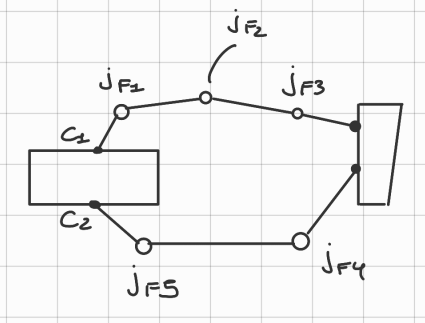 Where:
Where:
- : joint Finger
- each joint is angular, so it will have an angular velocity
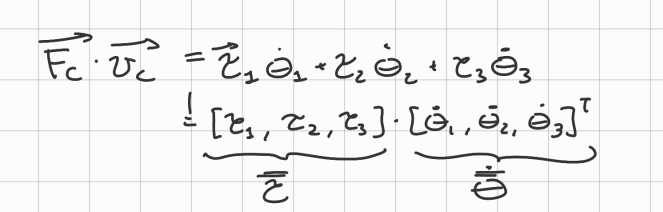
NOTE: The energy at the end-effector is the sum of all the energy expended by the joints. The joints at each point is calculated by the force times the velocity.
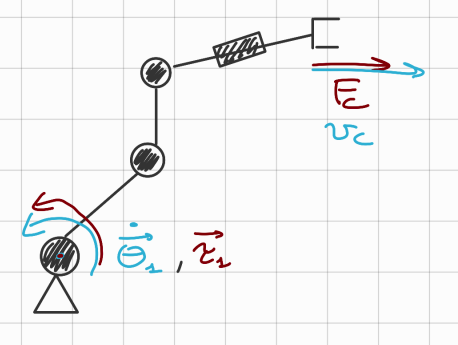
Ideally without dissipation of energy we have:
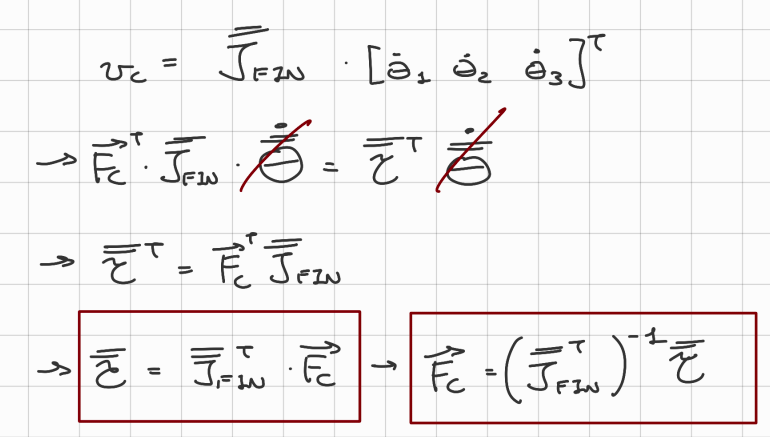
We also know that:
After a rough estimation of the weight and the barycenter of the object, our brain computes the already seen formula:
 So our brains has to do a few passages before we move the object at hand:
So our brains has to do a few passages before we move the object at hand:
- First it calculates the trajectory (), how I want the object to behave.
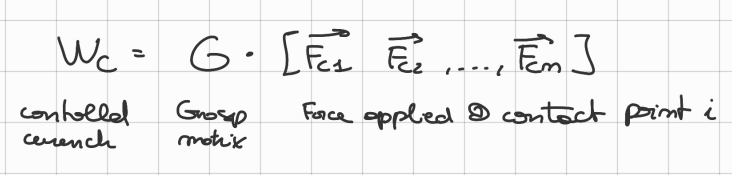
- Then it calculates the Grasp matrix, where are my finger on the object
- Lastly it evaluates the forces needed to move the object along the previous thought trajectory