The entire pose of an object, given one reference frame could be represented in another frame, just by multiplying the first one with a matrix called homogeneous transformation matrix.
Contrary to the rotation matrix, where we tackle only the problem of orientation, now we want to resolve also the problem of position.
After all ==a pose is just a collection of position and orientation==
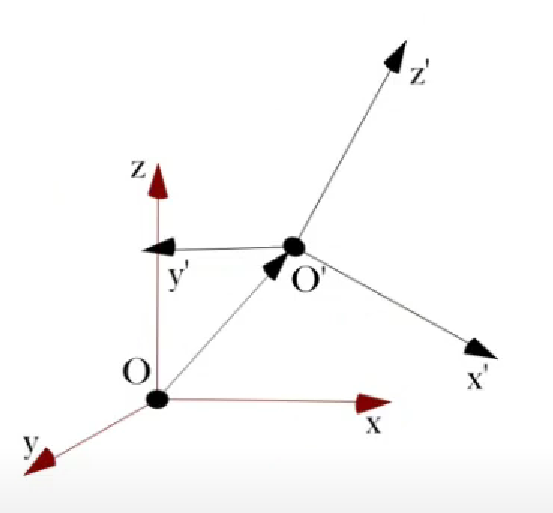
- So, first I resolve the problem of position (translation) then the problem of orientation (rotation).
- Solve the difference of and .
- Considering the and in the same center i calculate the rotation matrix.
Definition of ‘Transformation Matrix’
The Transformation Matrix that change one pose to another is denoted as .
\end{array} & \kern5px 1 \end{array} \right]_{4\times4} $$ Where: - $R^O_{O \kern 1px '}$ : [[HCR - Rotation Matrix|rotation matrix]]. - $O \kern 1px '$ : distance $\overline{O \kern 2px O \kern 1px '}$ Then we can write the following transformation given a point $p^{O}$ in the reference frame $O$ we can find the point $p^{O \kern 1px '}$ in the reference frame $O \kern 1px '$:$$p^{O \kern 1px '} = T_{O \kern 1px '}^O \cdot p^{O}$$ > **NOTE**: > The 3 zeros elements in the last row are usually unchanged but sometimes they do change, when they do it's because we want to impose the **concept of prospective**, for example when using a camera some dimensions are forcefully distorted (closer objects appear bigger). > **NOTE**: > The last element $(4,4)$ is often $1$, but it can be changed to reference the **scale of my robot or environment** ($0.1$, $0.01$, $0.001$, ... when working with small robots, while we'll change it to $10$, $100$, $1000$, $10000$ for big robots) ---- The **inverse** of a **tranformation matrix** $T$ is also a transformation matrix, and can be computed as:$$\begin{array}{l} T^{-1} &=& \left[\begin{array}{c} R^O_{O \kern1px '} & O' \kern2px \\[5px] \begin{array}{c} 0 & 0 & 0 \end{array} & 1 \end{array}\right]^{-1} \\[-5px]&\kern3px\downarrow&\\[-5px] &=& \left[\begin{array}{c} \left(R^O_{O \kern1px '}\right)^{\tiny T} & -\left(R^O_{O \kern1px '}\right)^{\tiny T} \cdot O' \kern2px \\[5px] \begin{array}{c} 0 & 0 & 0 \end{array} & 1 \end{array}\right] \end{array}$$***Source***: [Mecharithm (reading)](https://mecharithm.com/learning/lesson/homogenous-transformation-matrices-configurations-in-robotics-12#:~:text=The%20inverse%20of%20a%20transformation%20matrix%20T%20%E2%88%88%20SE(3)%20is%20also%20a%20transformation%20matrix%20and%20can%20be%20computed%20as) ^inverse-of-a-transformation-matrix