In generale la quantità di energia scambiata nell’interazione aptica è molto più alta rispetto agli altri tipi di interazione per questo non è un sistema efficiente per comunicare.
Il tocco è essenzialmente uno scambio di forze e per questo la robotica è il campo giusto da cui sviluppare interfaccie aptiche.
Il processo può essere così schematizzato: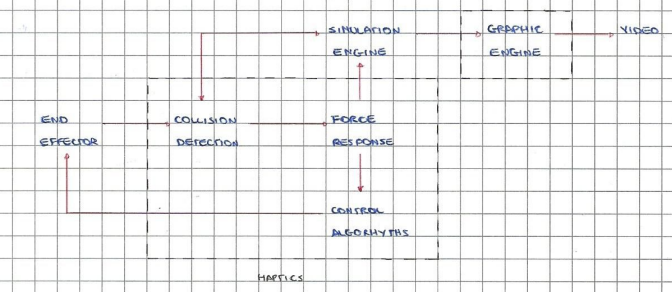 Il simulation engine è quello che svolge i calcoli, così che si possa rivelare la collisione, restituire un feedback, e mostrare a schermo l’ambiente virtuale.
Il simulation engine è quello che svolge i calcoli, così che si possa rivelare la collisione, restituire un feedback, e mostrare a schermo l’ambiente virtuale.