HCR - Definition of 'Impedance'
Impedance: , such that:For a given force the smaller the impedance ⇒ the higher is the velocity and viceversa.
- ~ Ex.: Mass-Spring Problem
Link to original
- Impedance:
- For a given system the higher is the impedance, the lower will be its velocity:An higher impedance brings more stability to the system.
It is the opposite of Compliance.
HCR - Definition of 'Compliance'
==For a given system the higher its compliance the higher the velocity==:As we can see it is the opposite of Impedance
Link to original
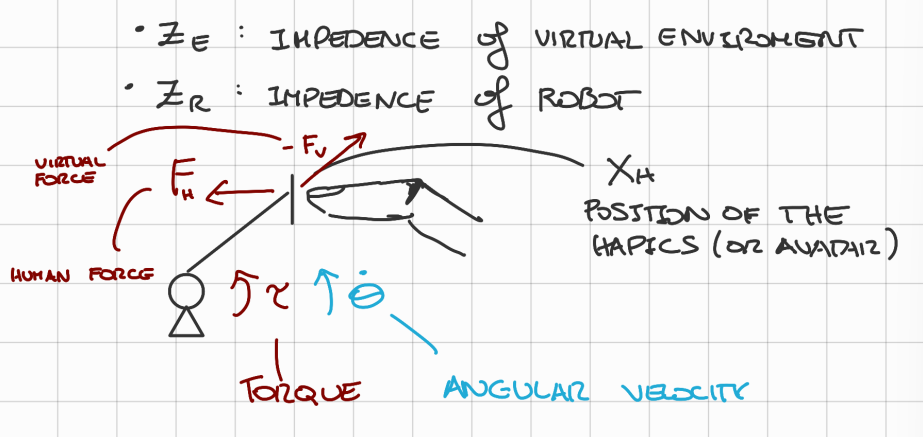
HCR - Transparency
Given:
I want to simulate an so given the we can have:
For this particular robot the only way to give a force feedback is to apply a torque so:
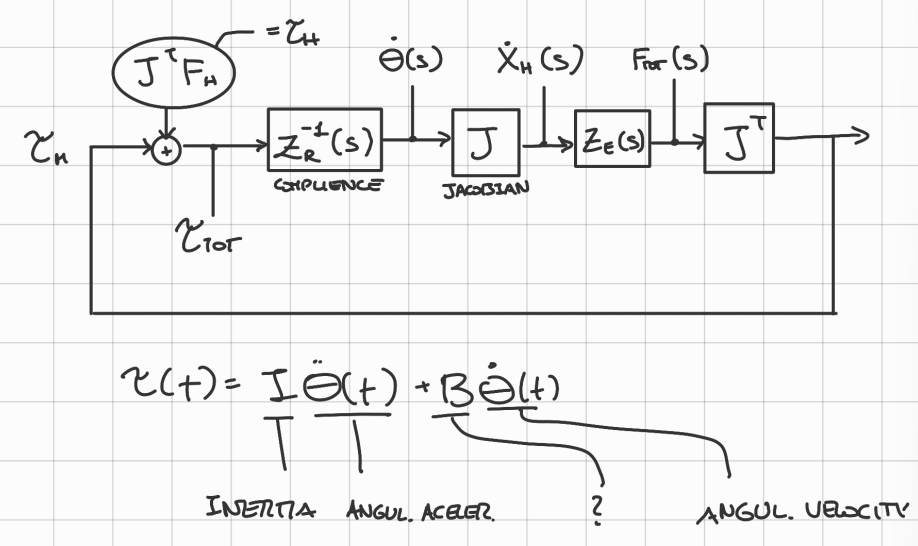
where is the Jacobian matrix. But there are 2 torques to be summed: the torque of motor and that of the human :
Then the total torque will be:Also remember that:Then:What is really felt by the human is the Force of the human itself and the velocity which is controlled by both and , then:$$ F = Z_p(s) \cdot \Large \dot{\normalsize X}\normalsize _h \cdot \frac{1}{s}
- $Z_p(s)$ is the [[HCR - Definition of 'Impedance'|Impedance]] **perceived** by the human. ![[Pasted image 20220328165717.png]] And: ![[Pasted image 20220328165734.png]]Link to original