Grasping vs Manipulation:
- GRASPING: Holding an object (it moves with me but is relatively still)
- MANIPULATION: Hold an object and control its trajectory (specific to the object)
We can see:
- Manipulation → active motion
- Grasping → passive motion
→ To manipulate objects humans have specifically developed the thumb
- Really important when talking about manipulation.
There are 2 kinds of manipulation:
- IN-HAND MANIPULATION
- POWER GRASP
IN-HAND MANIPULATION
Move the object with respect to the palm. Also called “dexteritious manipulation” ~ Ex.: Writing with a pen
POWER GRASP
I don’t care about the specific motion of the object. The object moves with respect to the arm (not the palm) ~ Ex.: Holding air-pods
Brain prospective
From our brain prospective when we grasp an object (power grasp) it does not cast anything (it doesn’t think about the hand receptors).
- For power grasping we do have control over the object in our hand, but it is not accurate, tho it is fast to process (for our brain).
- For in-hand manipulation, like writing with a pen we use 3 contact point (more generally a small number of contact points) and we need to control each of them very well. (While for power grasping we have many contact point but no need to control them)
Friction Cone
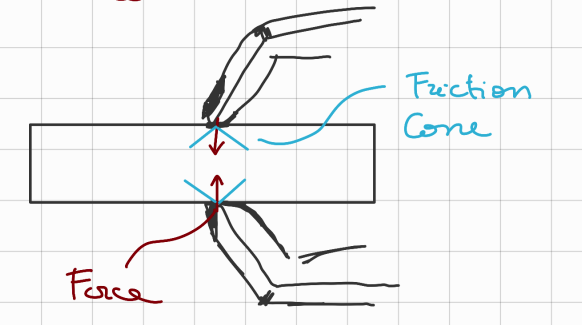
 → Where:
→ Where:
(The friction coefficent () is specific for each pair of object interaction)
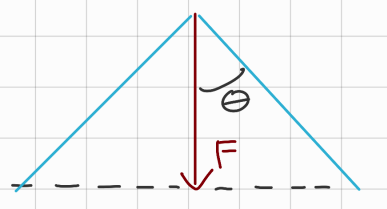
- A force that want to break the friction is applied as shown:
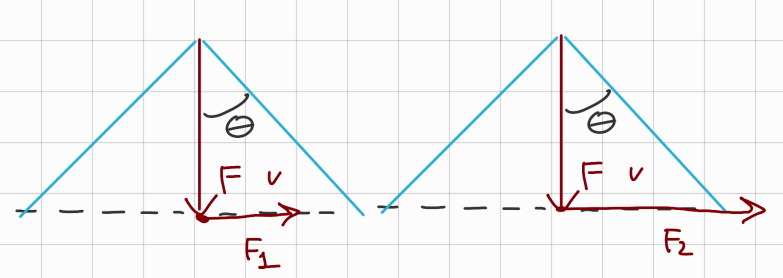 is too small to break friction (the object doesn’t move)
is big enough (the object begins to move)
is too small to break friction (the object doesn’t move)
is big enough (the object begins to move)
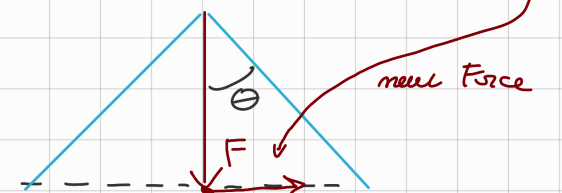
- Graphically is inside the friction cone
- While is outside the friction cone
Knowing where the friction cone is, and how big it is, is extremely crucial, because if i want to apply force to the object without it slipping out (break friction) i need to apply all the forces such that they stay inside the friction cones.
~ Ex.: Position of the friction cones
Suppose we have this object:
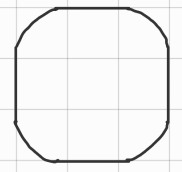
Let’s see how the position of the friction cones is useful.
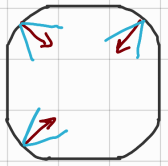
I apply to the previous object 3 forces: , resulting in this 3 friction cones:
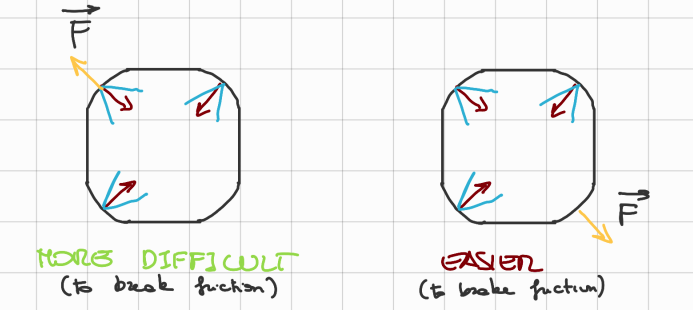
Take now an opposite force that tries to break friction.
It is clear that where i apply the previous 3 forces changes the intensity of the Force needed to break friction:
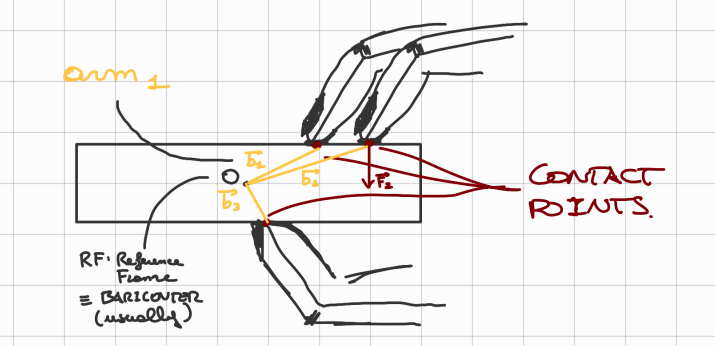
Representation of the forcer on the Reference Frame
Every force on an object can be represented in the object RF (Reference Frame) usually defined as its barycenter by another Force plus a Torque.
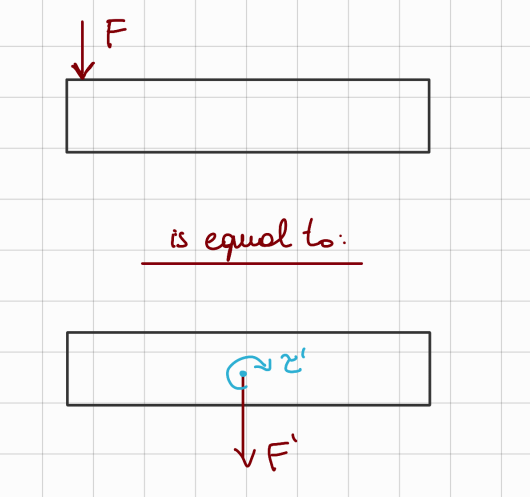
Also every interaction the object has with the world can be summarized by an external Force and an external Moment (or Torque)
- To compute the Torque
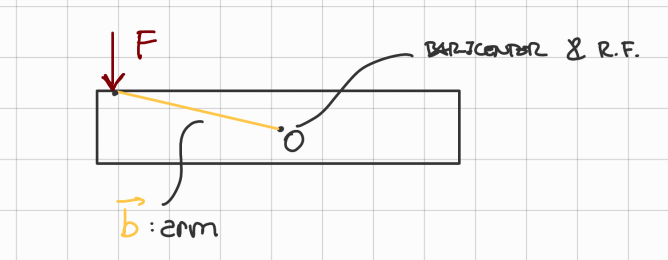
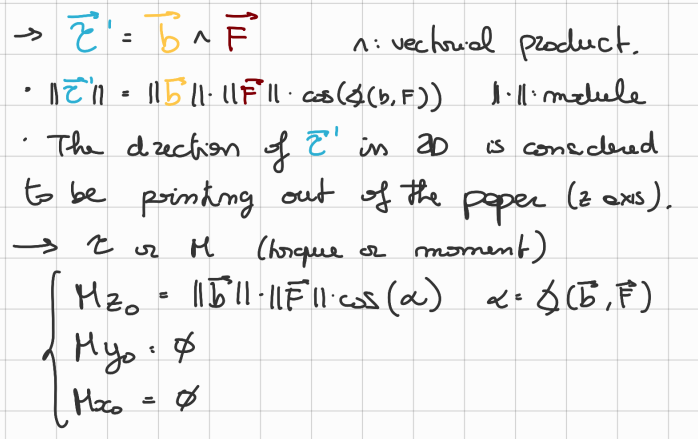
in the RF (reference frame) →
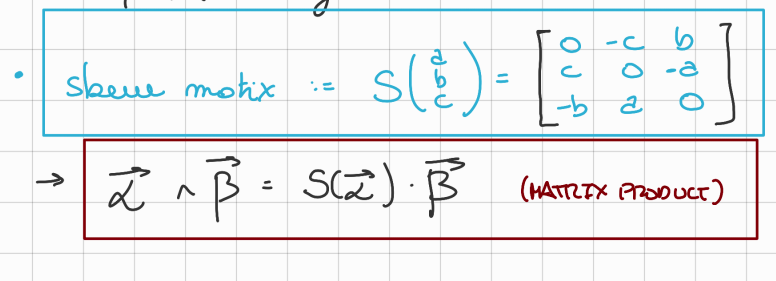
- The vector product can be computed using the Skew Matrix:
Wrench
→ Where:
- : Force vector
- : Moment vector
External Wrench
The external wrench is so defined:
→ Where:
- : Sum of all external Forces
- : Sum of all external Moments
→ So if we have an external wrench we can define the system as In Equilibrium (or grasping equilibrium) if we apply to it a Controlled Wrench , such that:
-
can be imposed by a human hand (IRL), a robotic hand (Industry) or a virtual hand (VR).
-
the controlled wrench (3 forces and 3 moments) represents the overall effect in term of forces and moments on the barycenter of the object, given by all the contact forces applied by the human/robotic/virtual hand at the contacts established with the object.
Grasp Matrix
- For each contact point we have a wrench of dimensions
- We define the Grasp Matrix as:
→ Where:
- has dimensions:
- has dimensions:
- So has dimensions:
→ Instead of using the Moment of each contact point, we use the arm to calculate it using the grasp matrix:
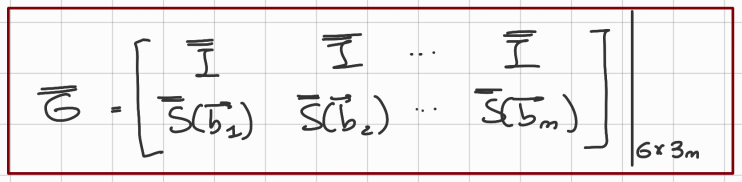 → Where:
→ Where:
- : Identity matrix
- : Skew matrix
- : arm (distance of the contact point from the RF : )
NOTE: The Grasp Matrix depend on the reference frame, so we can write:
Or Meaning the Grasp matrix is associated to the -th reference frame
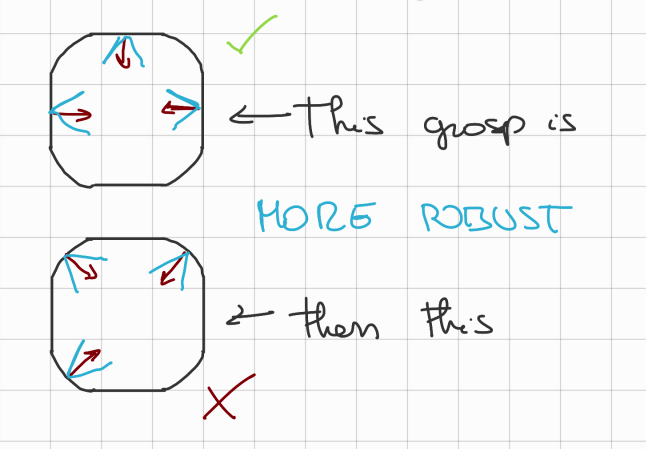
Change of the Normal
Suppose we posses an object and we want to find the best possible grasp between this two configurations:
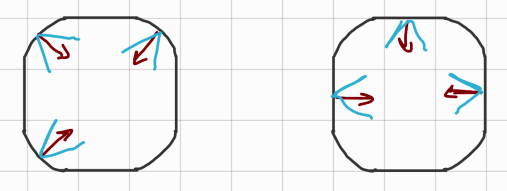
→ We look at the normal of the surface at the contact points:
- Notice how if the contact points in the first case change a little the normal changes a lot.
- While in the second case if we change the contact points a little (or we perturbate them) the normal does not change at all.

→ So we can say: