Let’s take a chain of joints: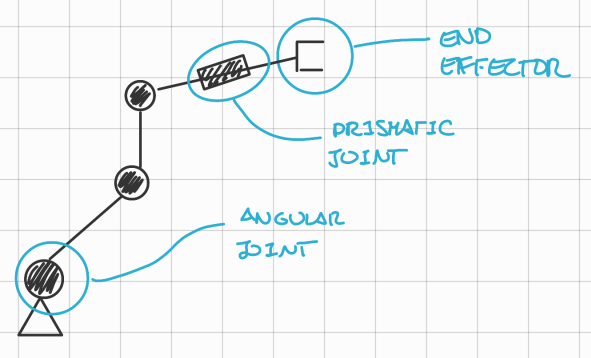
The generic formula will be:Where:
- and : velocity and angular velocity of the end-effector.
- : Jacobian matrix
- : velocity of joint , more specifically:Where:
- : distance of -esim joint from -esim joint.
Search
Oct 01, 20241 min read
Let’s take a chain of joints:
The generic formula will be:(vw)=Jˉˉ⋅vJ1vJ2vJ3Where: