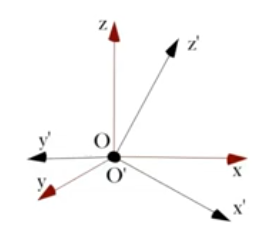
Given two reference frames like so:
We can write:
Where for example is defined as:
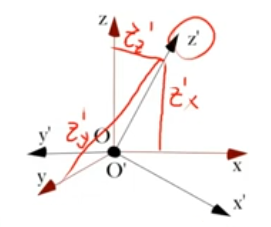
So, is defined as:
Rotation Matrix from reference frame to
Search
Oct 01, 20241 min read
Given two reference frames like so:
We can write:
⎩⎨⎧x′=xx′⋅x+xy′⋅y+xz′⋅zy′=yx′⋅x+yy′⋅y+yz′⋅zz′=zx′⋅x+zy′⋅y+zz′⋅z→x′y′z′=RˉˉxyzWhere for example zx′, zy′, zz′ is defined as:
So, R is defined as:
R=xx′yx′zx′xy′yy′zy′xz′yz′zz′≜RO′ORO′O ≜ Rotation Matrix from reference frame O to O′