Il movimento è lo spostamento di un insieme di punti, di materia, secondo un qualche sistema di riferimento di 3 assi. I movimenti possibili sono:
- La traslazione.
- La rotazione.
==Il problema che affrontiamo è quello di conoscere la posizione e l’orientamento degli oggetti, in riferimento ad un sistema di riferimento esterno==: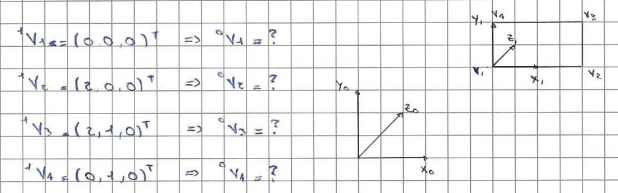
Se due vettori sono nello stesso sistema di riferimento si possono sommare tramite la regola del parallelogramma per stabilire il vettore risultante.
Per trasporre il vettore in un altro sistema di riferimento si opera la somma tra il vettore, che dal secondo punta al corrente sistema nell’origine, e viene rapprensetato poi secondo il nuovo sistema.
Vediamo degli esempi per capire meglio: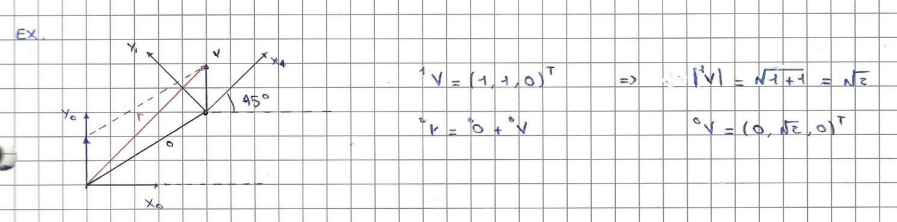
Secondo Eulero le 3 componenti del vettore possono essere espresse come:Dove:
- and sono versori.
Lo si può scrivere anche come:Ovvero: L’obbietivo ora è determinare la matrice che permette di passare da un sistema di riferimento all’altro:Where:
- is a vector.
- is a matrix.
- is a vector.
Dunque gli assi che definiscono il secondo sistema di riferimento devono essere espressi secondo il primo.
Dato quando stabilito prima per un generico vettore: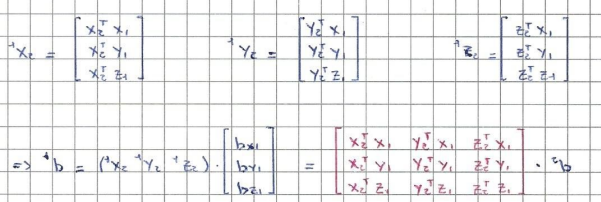 Dove la matrice trovata è la matrice di rotazione . Essa è composta da soli valori , dal momento che tutti gli elementi sono versori.
Dove la matrice trovata è la matrice di rotazione . Essa è composta da soli valori , dal momento che tutti gli elementi sono versori.
~Ex.: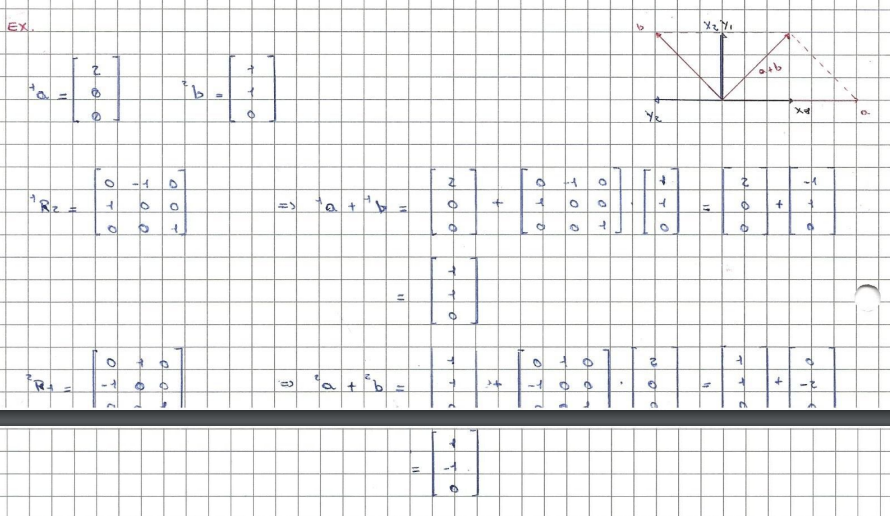
Da questo si può generalizzare che: Inoltre ricordando che:
==⇒ Se: , allora: ==.
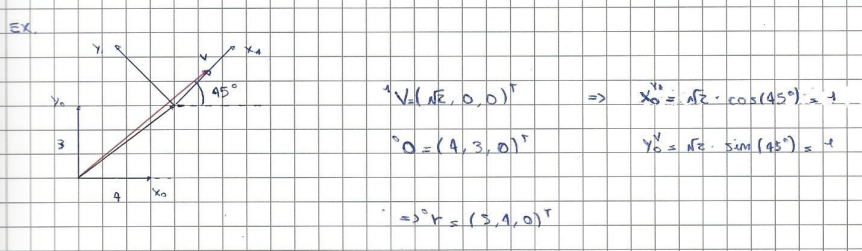
Le operazioni di roto-traslazione sono la combinazione di una traslazione e di una rotazione, vediamo un esempio: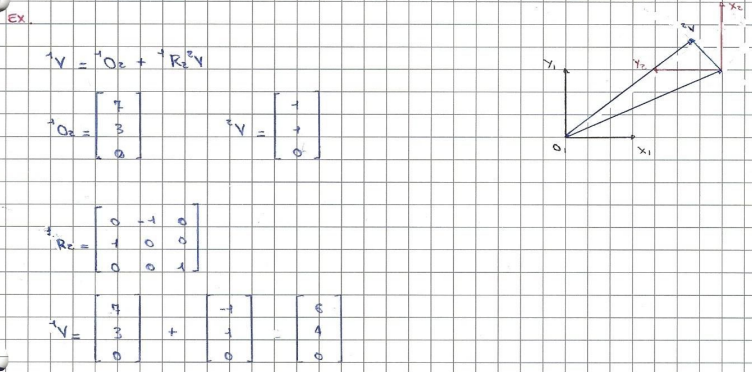
Esiste per queste operazioni una tecnica più diretta, ovvero la funzione di trasformazione omogenea.
Per applicarla è necessario avere i vettori omogenei, i quali hanno un elemento aggiuntivo pari ad come ultimo elemento rispetto al vettore originale: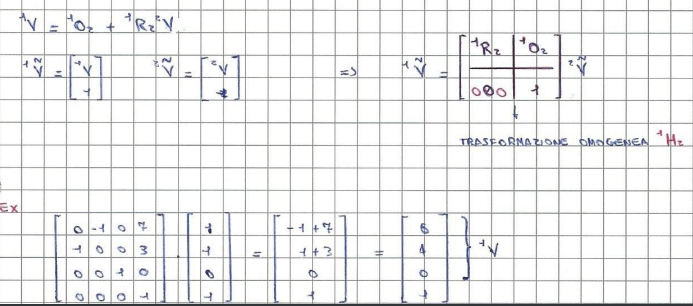
Esiste anche un’altra forma della matrice di rotazione, la quale ha come riferimento l’angolo tra l’asse delle ascisse di un sistema di riferimento e quello dell’altro sistema: