A rigid body is completely described in a reference frame by position and orientation.
 The position of point on the rigid body with respect to the coordinate frame () is expressed by a three dimensional vector .
The position of point on the rigid body with respect to the coordinate frame () is expressed by a three dimensional vector .
Where are versors. (??? it doesn't make sense, they should not be versors ???NOT_SURE_ABOUT_THIS )
So the position of with respect to is defined as:

In this case:
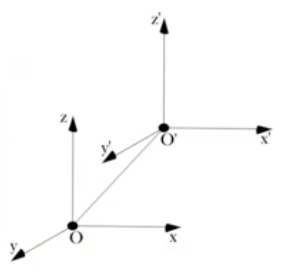
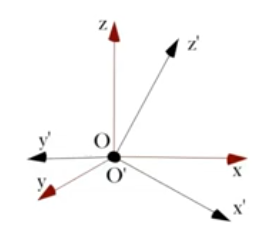
- : is the World reference frame
- : is the Object reference frame
The idea is: I want to know in respect to . This because in my system is NOT allowed to change (being the world reference frame) so it’s perfect for referencing that can change.
While for the position of with respect to , we can use the position of each vector of the object frame with respect to the reference frame:
 We obtain a representation of rotation by the Rotation Matrix
We obtain a representation of rotation by the Rotation Matrix