Grasp Matrix
- For each contact point we have a wrench of dimensions
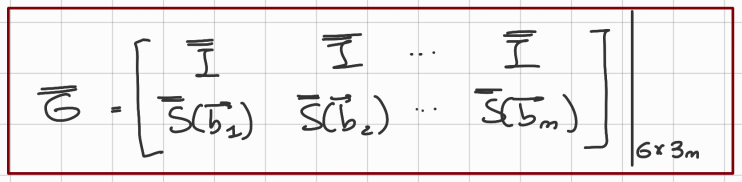
- We define the Grasp Matrix as:Where:
- has dimensions:
- has dimensions:
- So has dimensions:
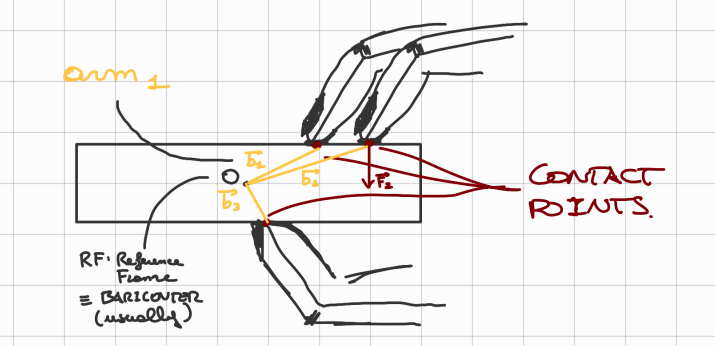
Instead of using the Moment of each contact point, we use the arm to calculate it using the grasp matrix:
 Where:
Where:
- : Identity matrix
- : Skew matrix
- : arm (distance of the contact point from the RF : )
NOTE: The Grasp Matrix depend on the reference frame, so we can write:Meaning the Grasp matrix is associated to the -th reference frame