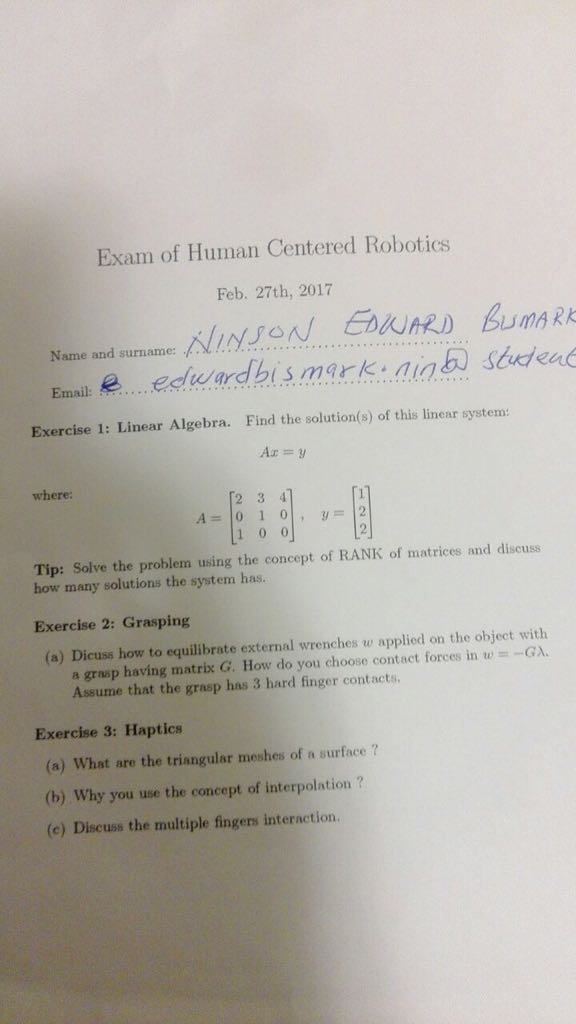
- Exercise 1: Linear Algebra ^exercise-1
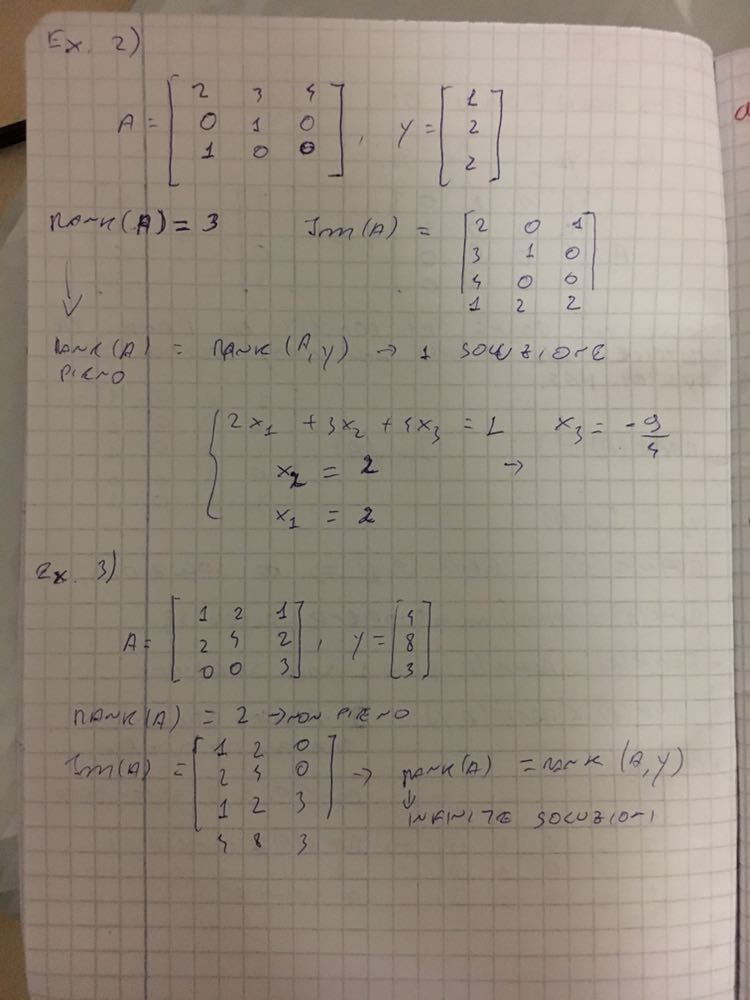
- Find the solution(s) of this linear system:Where:Tip: Solve the problem using the concept of RANK of matrices and discuss how many solutions the system has.
- Exercise 2: Grasping
- Discuss how to equilibrate external wrenches applied on the object with a grasp matrix having matrix . How do you choose contact forces in .
Assume that the grasp has 3 hard finger contacts.
- Discuss how to equilibrate external wrenches applied on the object with a grasp matrix having matrix . How do you choose contact forces in .
- Exercise 3: Haptics
- (a) What are the triangular meshes of a surface?
- (b) Why you use the concept of interpolation?
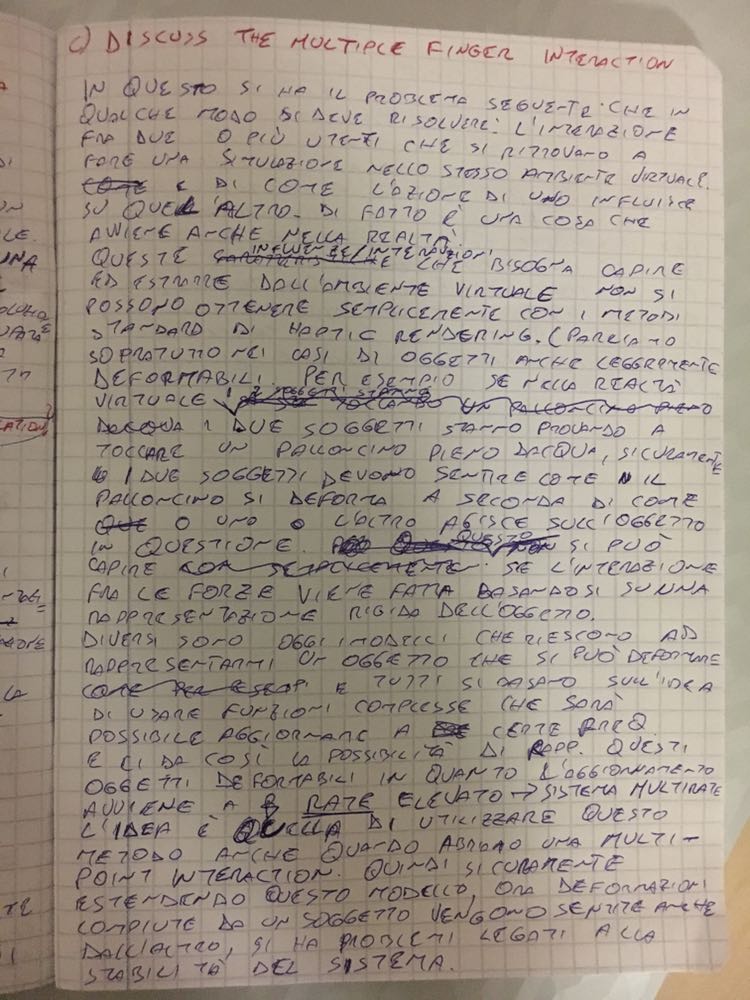
- (c) Discuss the multiple fingers interaction.
- Solutions
- (Exercise 1: Linear Algebra)TODONOT_SURE_ABOUT_THIS
I will give my response, I don't know if its correct, I don't understand the one given in the PDFs
First we find the determinant of the matrix using the rule of Sarrus, then if the determinant is we will say that the rank of the matrix is NOT full, so it will not exist a solution for the linear equation.
While if , then we will say that has full rank, so it is invertible and the solution can be found by solving the following equation: - (Exercise 2: Grasping) ⇒ Same as: exam (2017 04 04).
- (Exercise 3: Haptics - a.)TODO
- (Exercise 3: Haptics - b.)TODO
- (Exercise 3: Haptics - c.)TODO
- (Exercise 1: Linear Algebra)TODONOT_SURE_ABOUT_THIS
Original Files
- Exam:
- Solutions:
.jpeg)