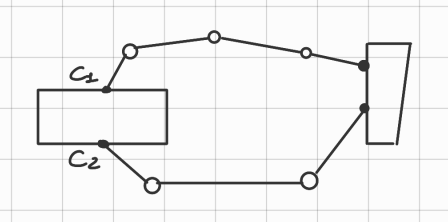
The selection of the contact velocities depends on the model of the contact that we used.
There are 3 main contact models:
- Hard finger with friction
- Hard finger without friction
- Soft finger
We will use the 1-st one (Hard finger with friction)
To understand the difference between the first and the second model let’s consider us holding a pen and wanting to write on a piece of paper:
- If the paper is normal (it has friction) I can easily write on it (1-st case)
- If the paper is oily (it has no friction) I cannot write on it, I can only impose a vertical force, I slip away when I apply tangential forces (2-nd case)
- In case of Soft fingers we have reduced control on it, instead of having for its wrench 3 forces and 3 moments we only have 3 forces and 1 moment: