Given 2 reference frames we define the elementary rotation of the frame with respect to frame as the rotation of only one axis of the frames.
The composition of multiple Elementary Rotation Matrix result in a complete Rotation Matrix. ~Ex.:
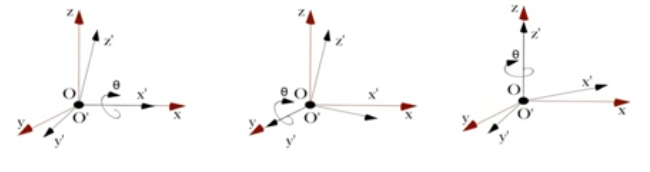
~ Example: Rotation along the axis: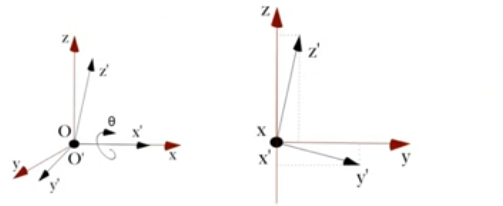
We rotate the frame with an angle of along the axis, as we can see in the second picture we can rewrite the rotation as:
- ~Example: Other Elementary Rotations: