- We are not interested/we don’t care about solving for analytically, we will not find the formula, at most we will solve it numerically, that means, solving using numerical data, giving and actual values.
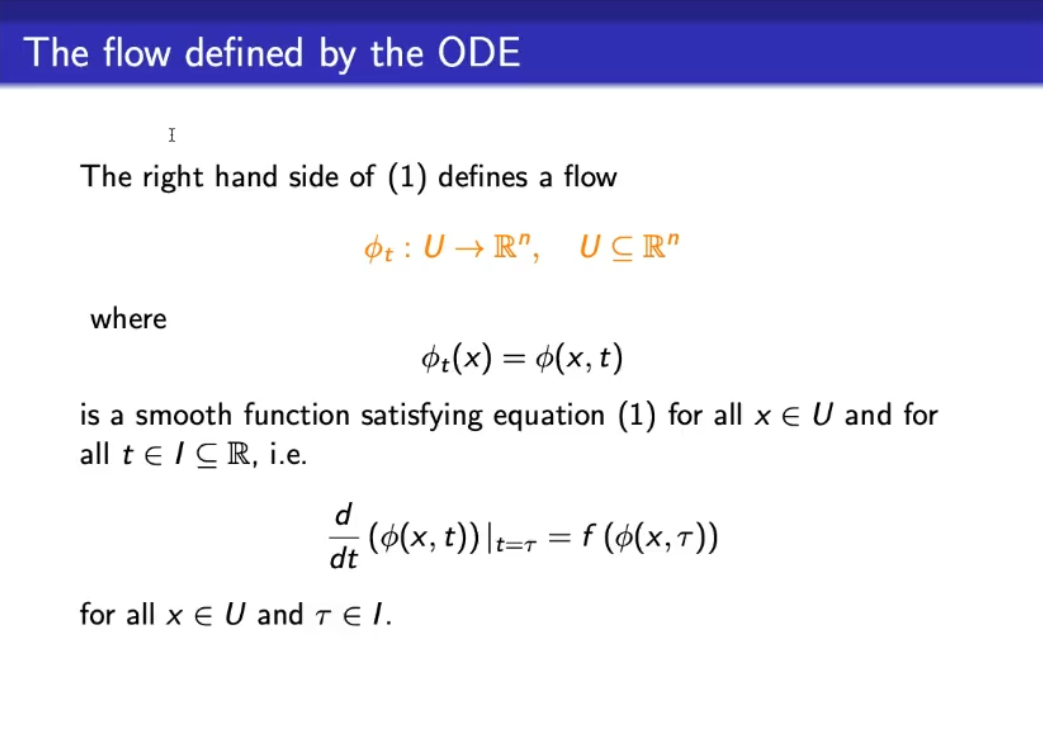
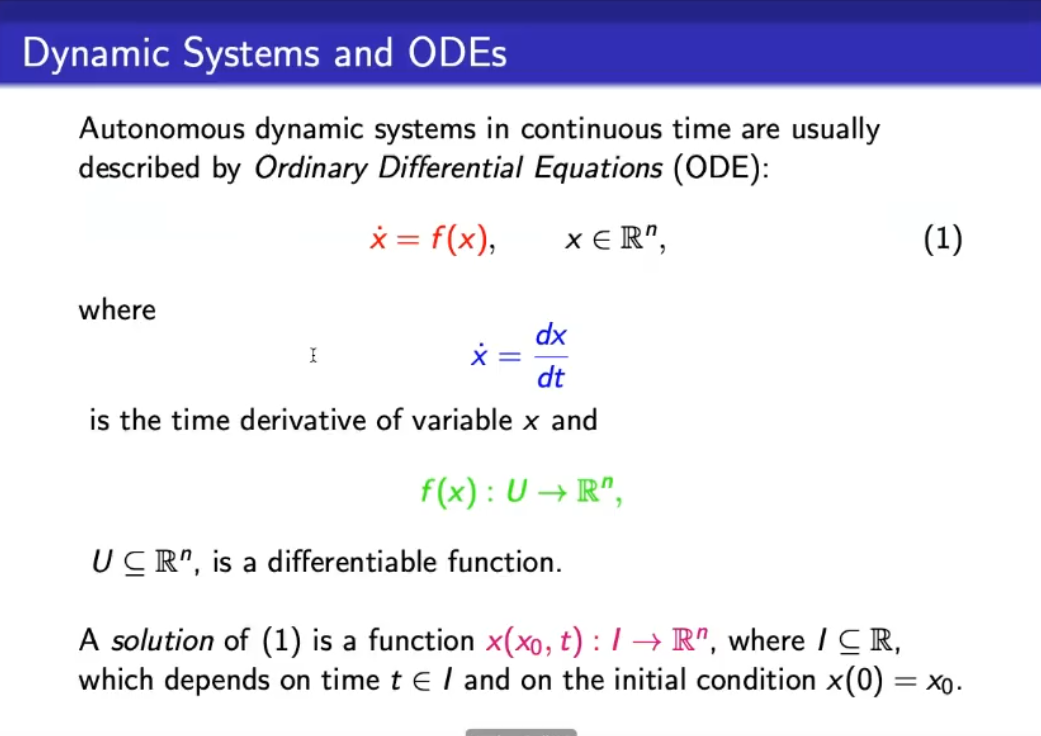
- Consider the flow as an “image” of the function for some and initial state , where: .
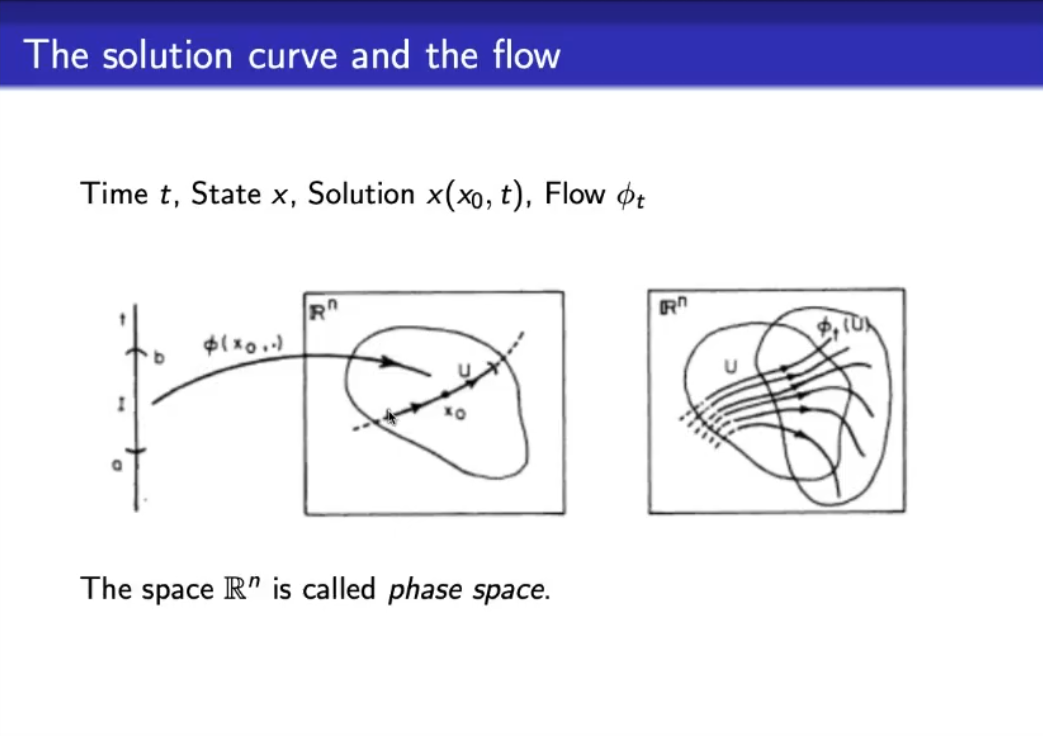
- In first picture we use a single initial condition, in the second we use many initial conditions, to see how the system evolves.
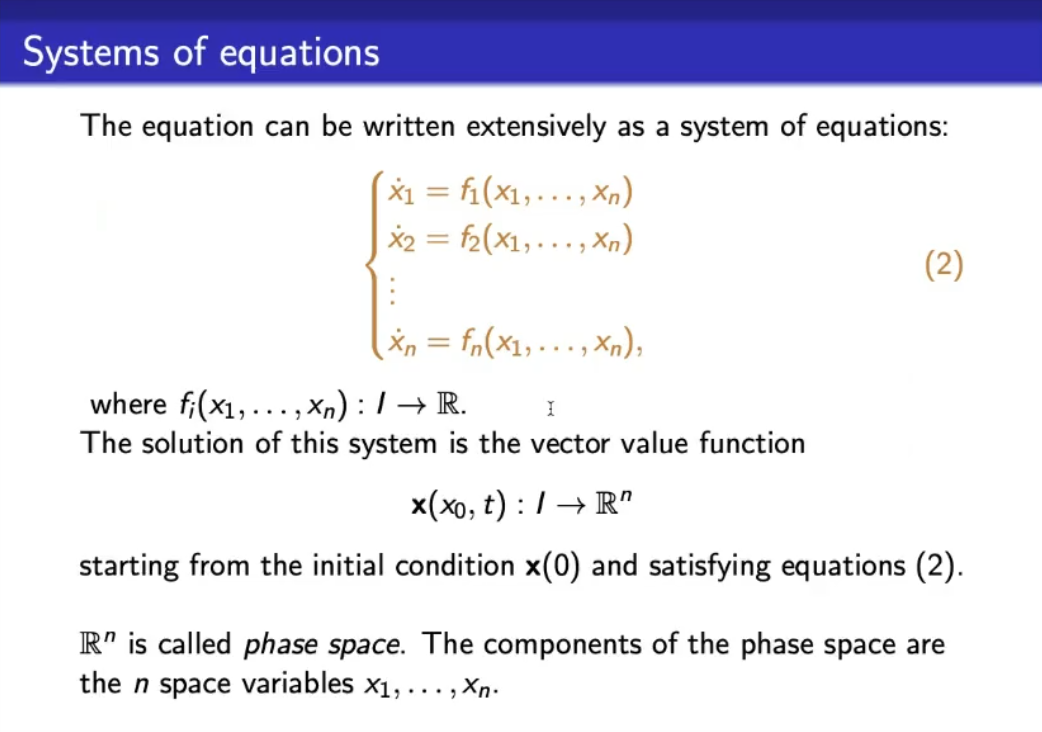
- , so as well, are vectors, while the time is a scalar, so .
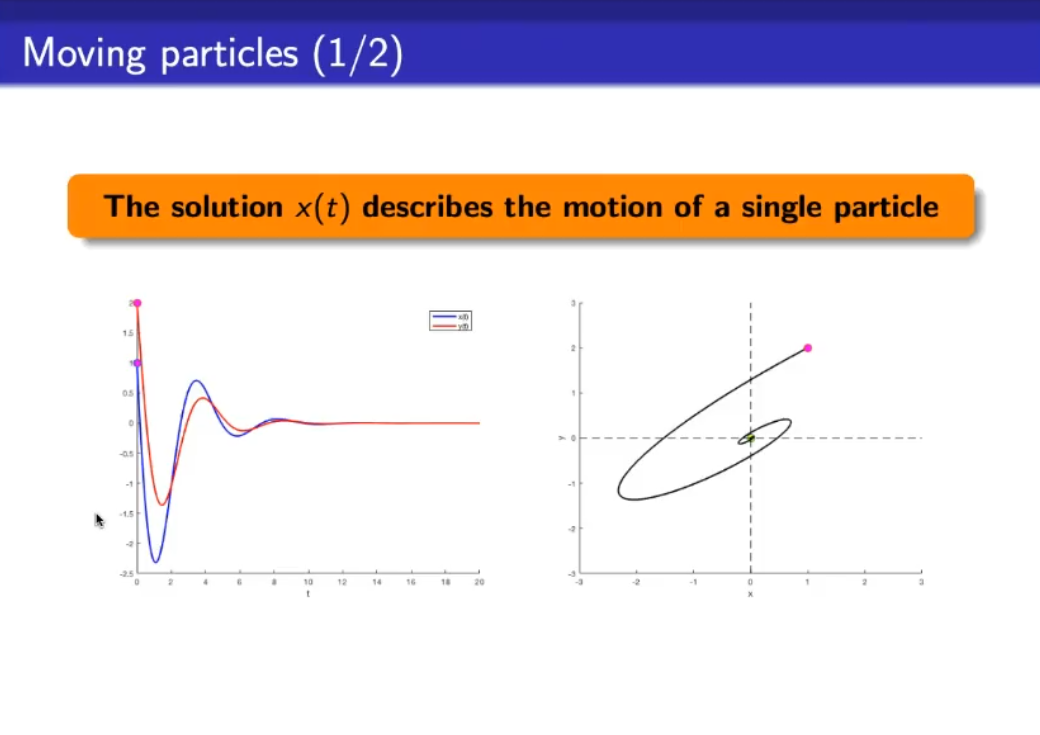
- Here’s the example in which
- In the first graph we represent and
- is called
- is called
- In the second graph we represnt the flow, however it misses the arrows that indicate the flowing of time.
- If we were to take we would need a 3D graph to represent flow.
- The first graph is called dyncamics graph, the second phase space.
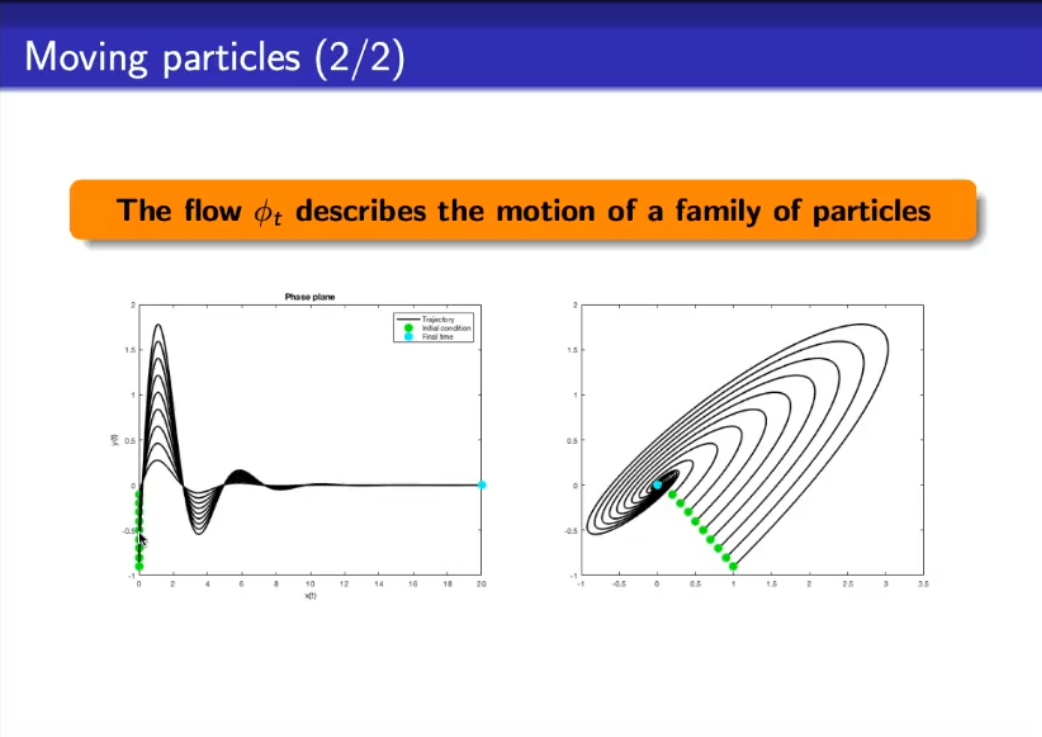
- If we take many different initial conditions
- So when desining the geometry of the phase space, then we will have that a solution in the phase space CANNOT intersect itself, still under the hypotesis that is a differentiable function.
- eigenvectors ??? and eigenvalues ???TODO
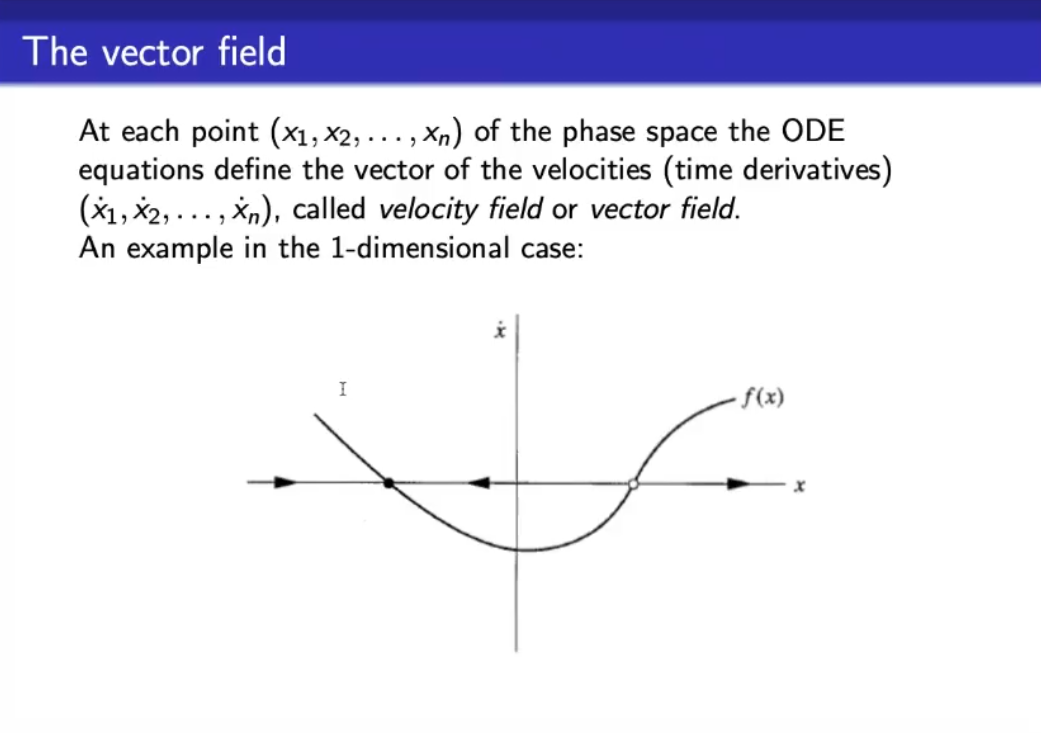
- This is an example of how we can study the geometry of the steady state.
- The black point is a STABLE steady state, also called “attractor”.
- The white point is a UNSTABLE steady state*.
- The arrows define how ???TODO the system evolves / the initial condition evolves
- can also be seen as representig the velocity, as you can see the velocity decreases as you approach the stady state.
- IMPORTANT
- In case of linear system we need the nullclines, and eigenvectors, to define the phase space.

- This is a special linear system, depends only on and depends only on .
- General case.
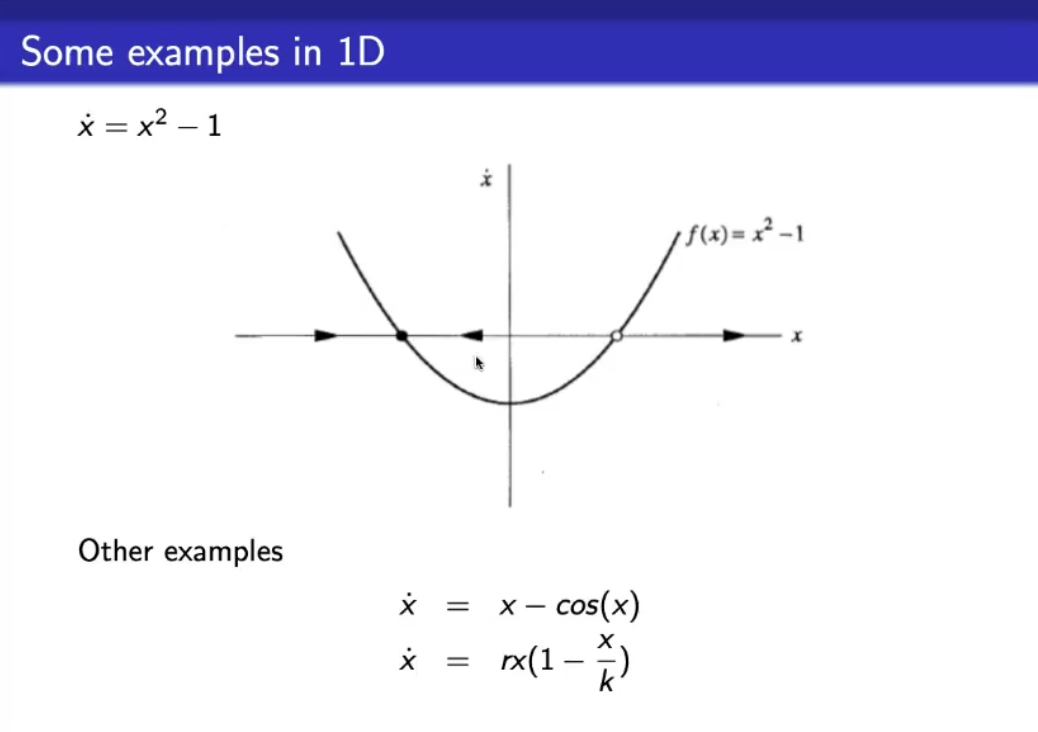
If we solve analytically we find:We can define:And we can find:However remeber, that we will not find analytic solutions.
We can represent the graph :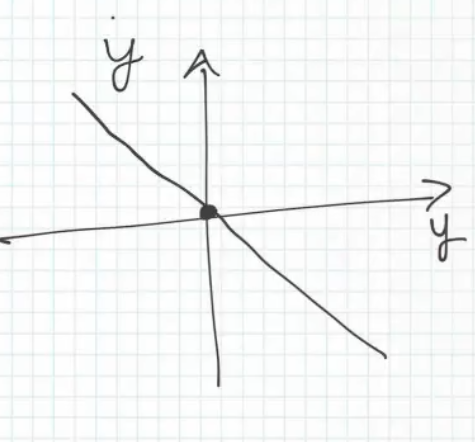
- is a steady state.
Let’s represent the flow:
On the right of the ss (steady state) the derivitave over time () is positive.
While on the left , so: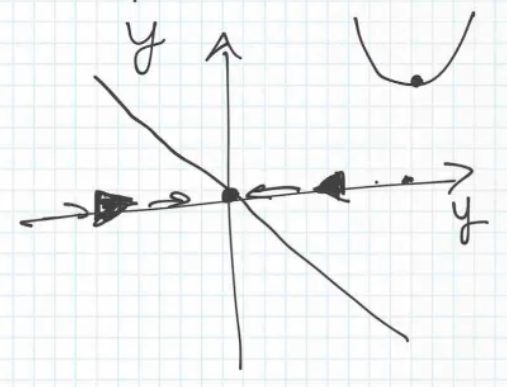
- As we can see is a stable steady state.
Now we can study , notice that can assume different values, mainly we will focus on and for .
For , basically the graph is the same as before (for ):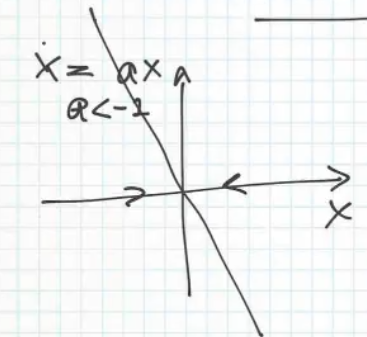
Let’s combine this two solutions, and let’s draw the nullclines, so let’s find for and , so:For this case preatty simple, let’s draw the nullclines: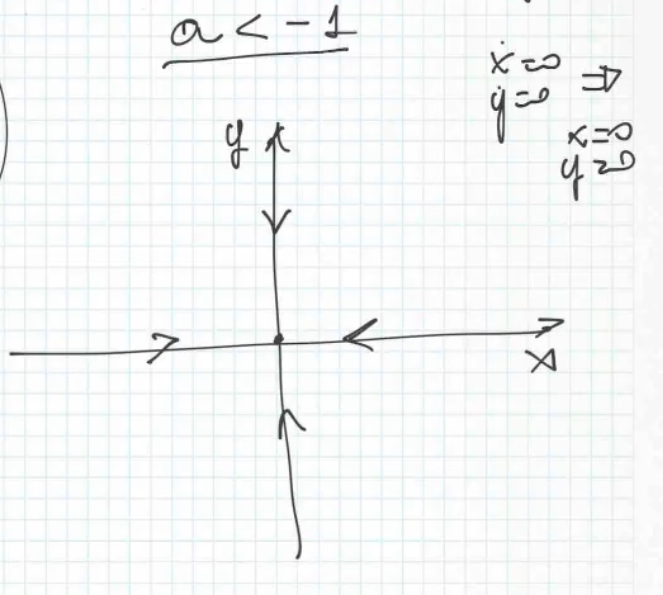
Now we can represent the flow: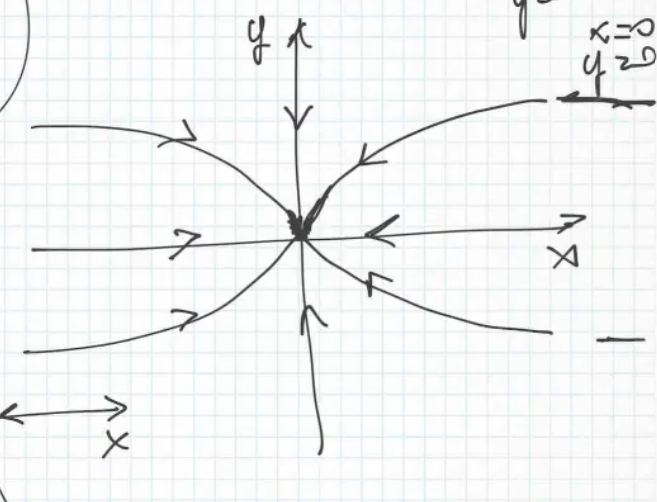
- For we have that the flow will be parallel to the axis.
- For (the ss) we have that the flow will be parallel to the axis.
If we represent the “motion of a family of particles” (the flow ):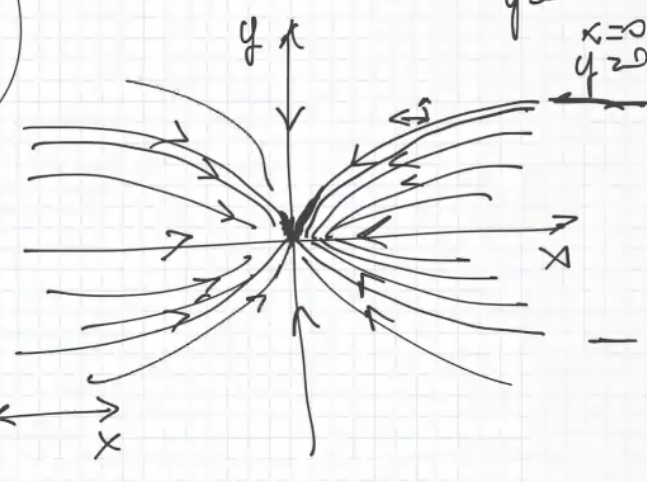
- This form is becasue , so the velocity along is higher than the velocity along .
- The velocities we said can be seen as and .
If we take :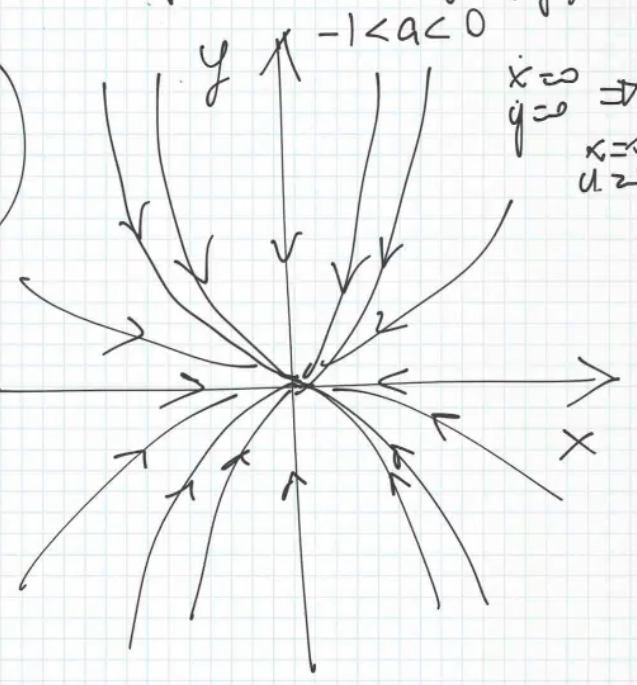
Special case for :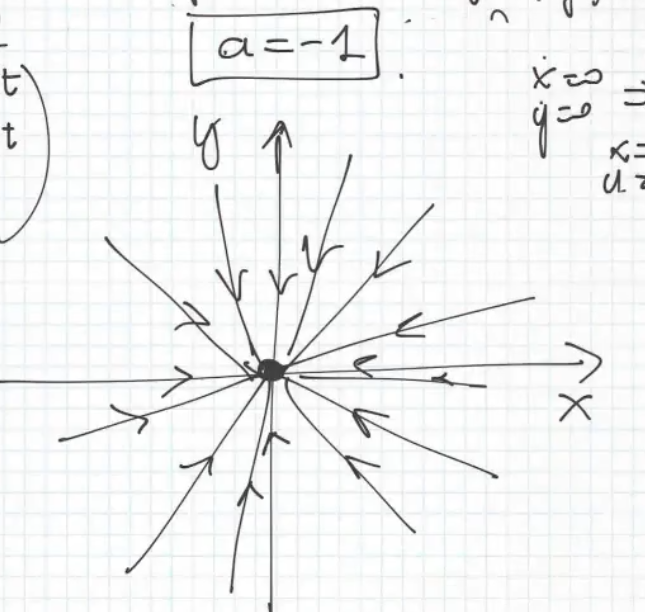
- In all of these cases the node is called “node”.
- In this particular case, it is called a “node star”
Let’s see what happens for :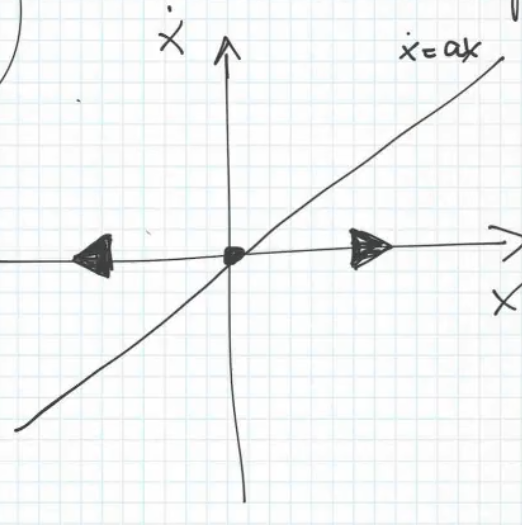
- This is an unstable steady state, since:
The nullclines changes: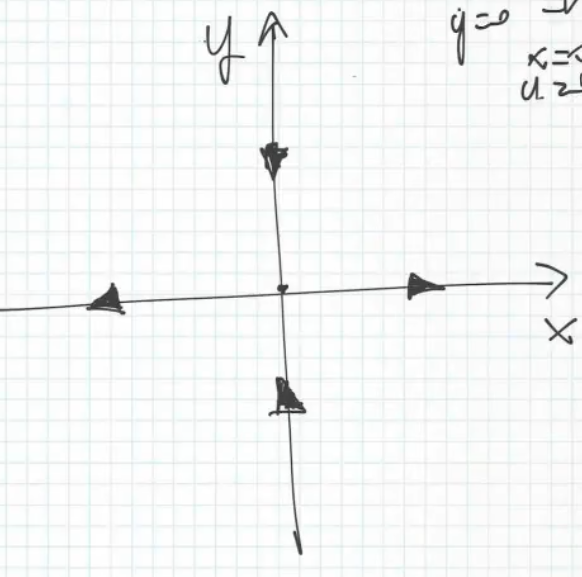
If we represent : 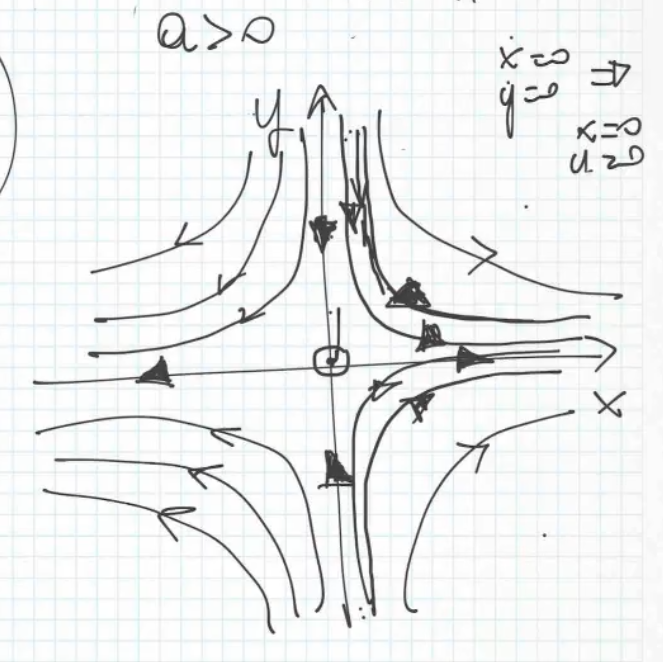
- All initial condition will diverge, except and initial condition such that it lies along the axis, so for .
- For the system will converge to .
- For the system will diverge.
- So one component converges and another diverges, for this reason this graph is called a “saddle”, sincenot-sure-about-this
For :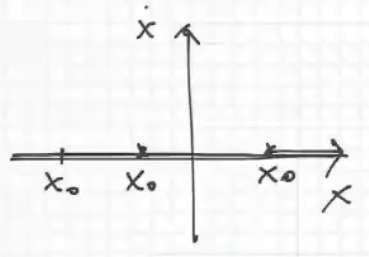
- We cannot represent any arrow, and it said to be marginally stable.
And the flow for :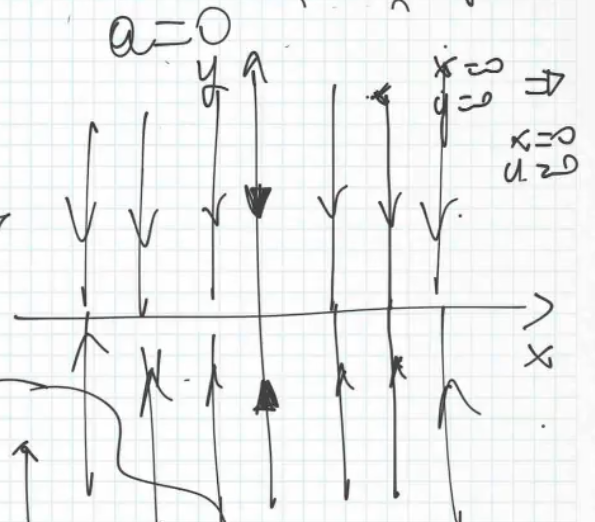
- Called “line of steady states”.
As a sneak-peak for the future, in this system we can define the eigenvalues as: and , the sign of the eigenvalues is strictly correleted to the stability of the steady states.
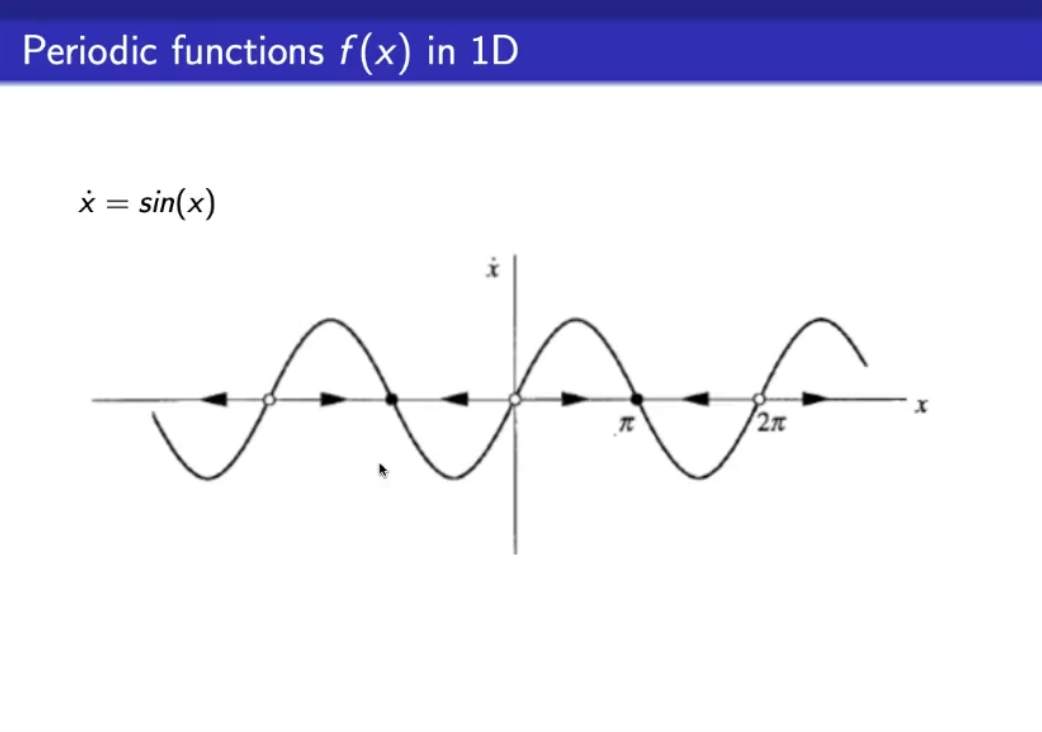
- This function is periodic over , however monodimensional system cannot present periodicity over , nor oscillations.
- As a sneak-peak: we’ll need imaginary eigenvalues in a multidimensional system to have oscillations.
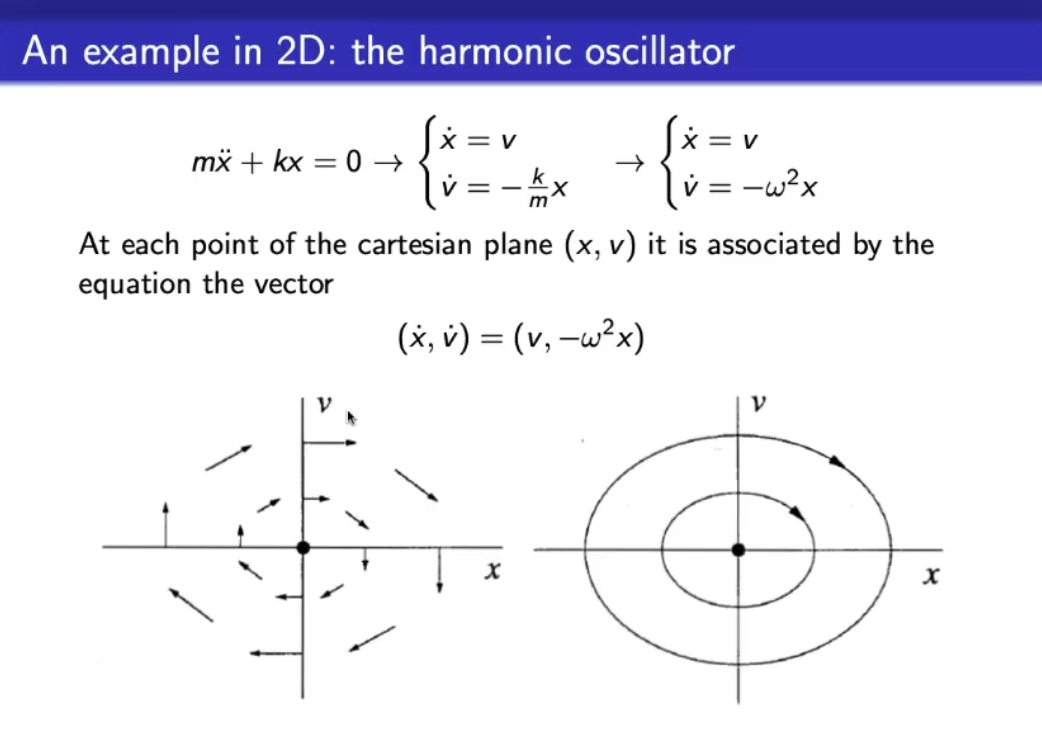
- mass-spring system (no damper).
- Since (or because ) we can call this system “coupled”.