

- These metronomes started with different initial conditions, will syncronize, due how the “system is built”.
- Generally we can say that to create a syncronization between multimple systems, we need to create a connection between them, in this example the connection is the plank suspended on two cans of soda.
- Syncronization happens in particular networks.
- Syncronization is one of the simpler example of “self-organization”.
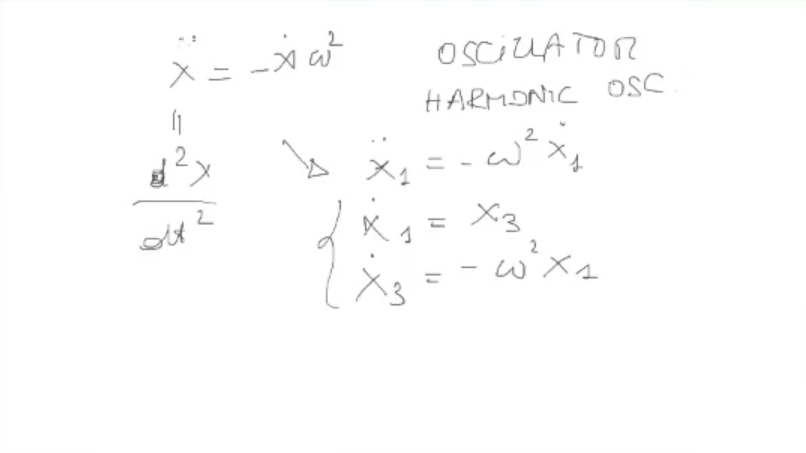
- Simple harmonic oscillator
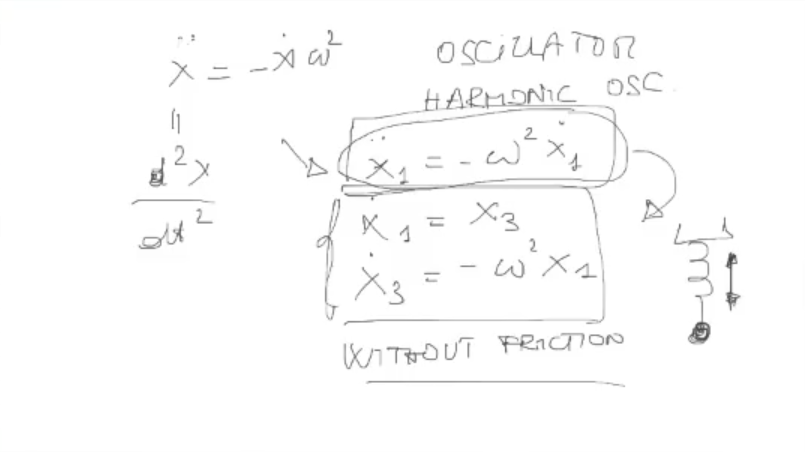
- Represents for example a mass-spring system without friction.
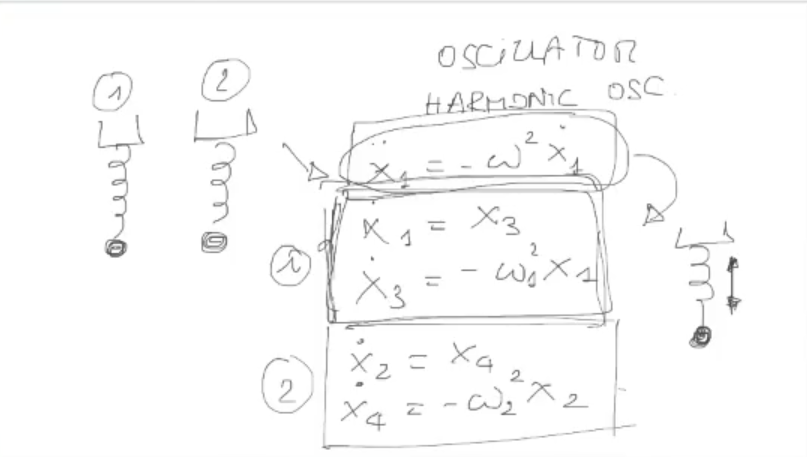
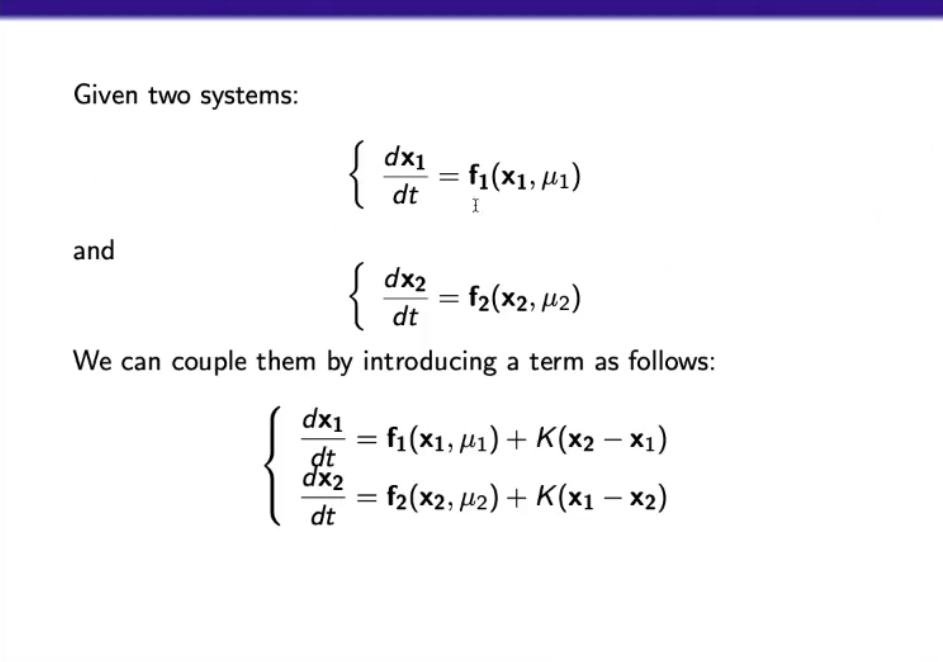
- Consider annother equivalent system (it will have different initial conditions, but same differential equations)
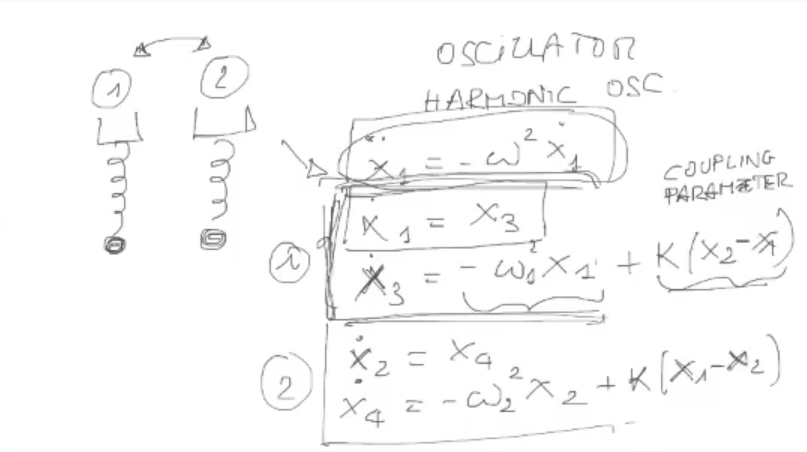
- Leaving the first equaiton untuched (since it serves only to define x¨ in terms of ODE equations), we can add a term called “coupling parameter” that depends on a variable of the second system.
- I rewrite here the equations:{x1=x3x3=−ω12x1+k(x2−x1){x2=x4x4=−ω22x2+k(x1−x2)
- NOTE: for x2=x1 this term is equal to 0 ⇒ This term is active only when these two variables are different.
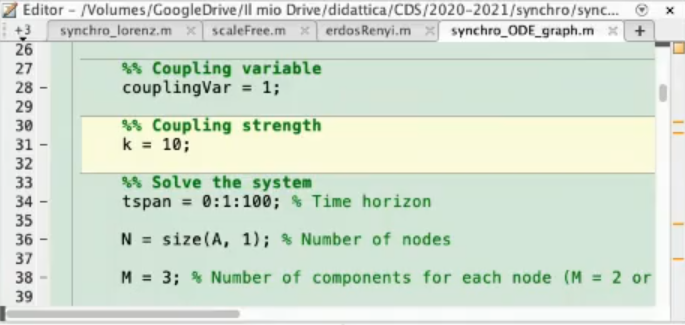
- c is the coupling term, previosly called k.
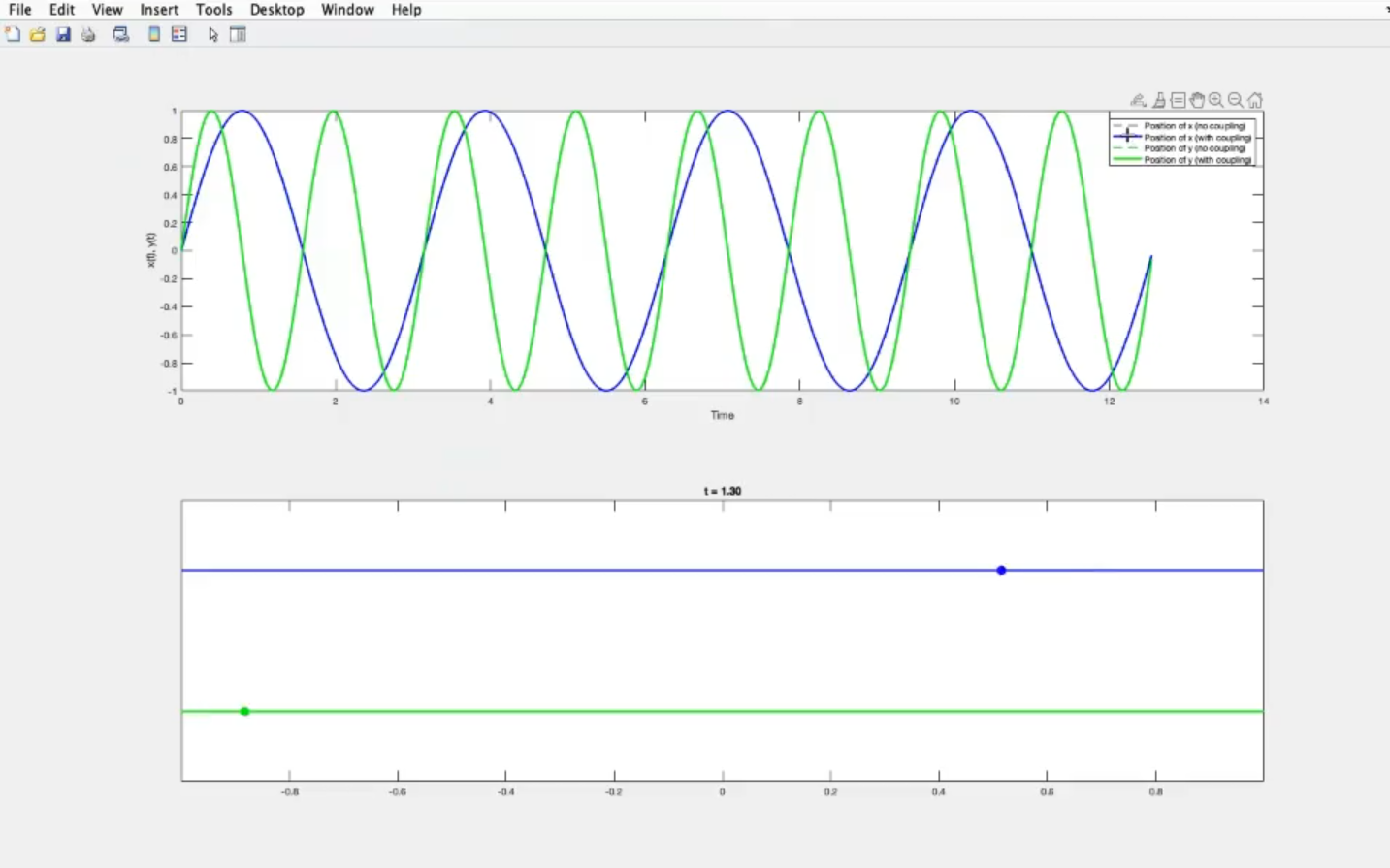
- Positions of the two systems.
- This graphs are without coupling, c=0.
- c=1, now there is coupling.
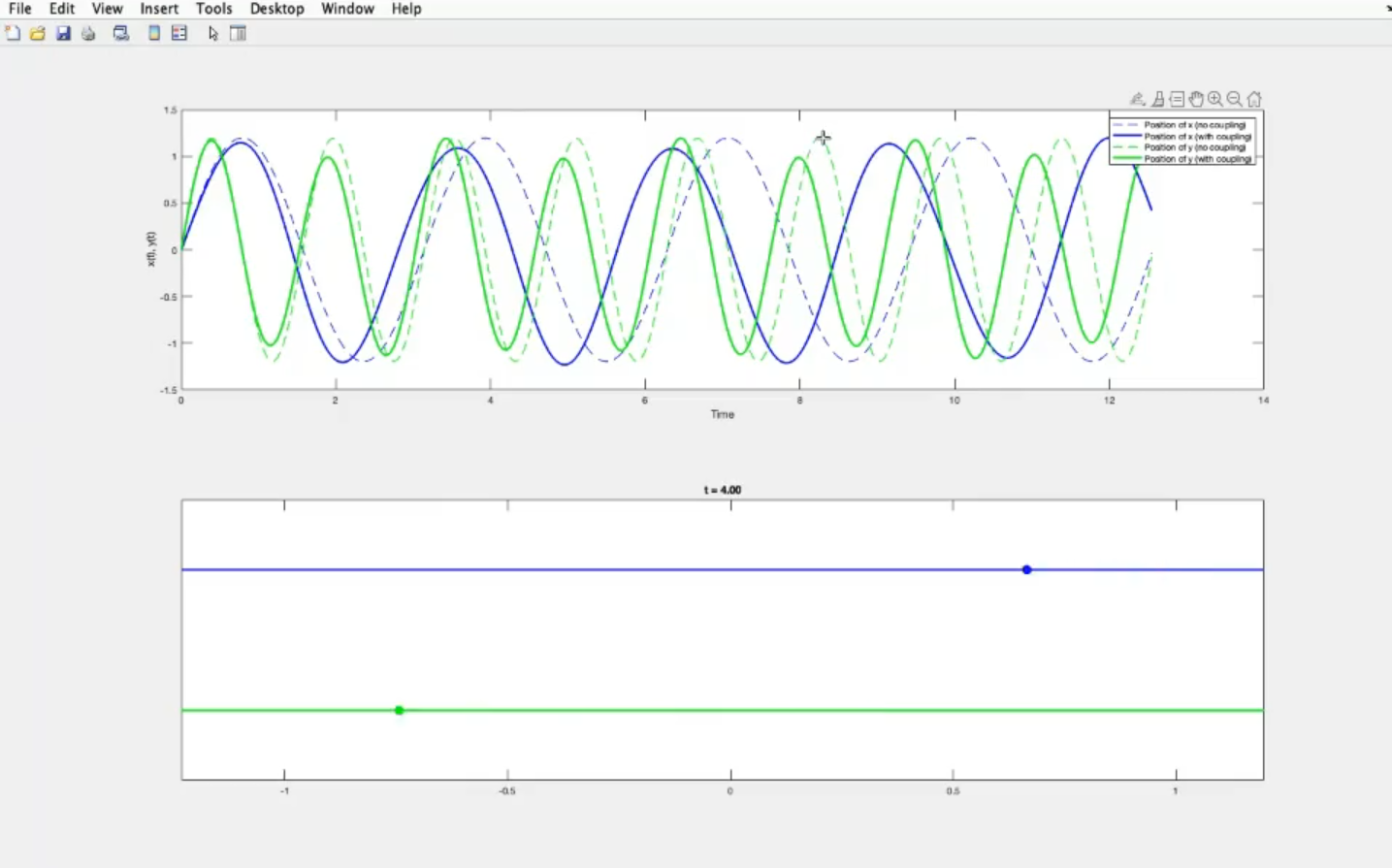
- The continous lines are the real systems (with coupling), the dotted line are are the systems without coupling (seen before).
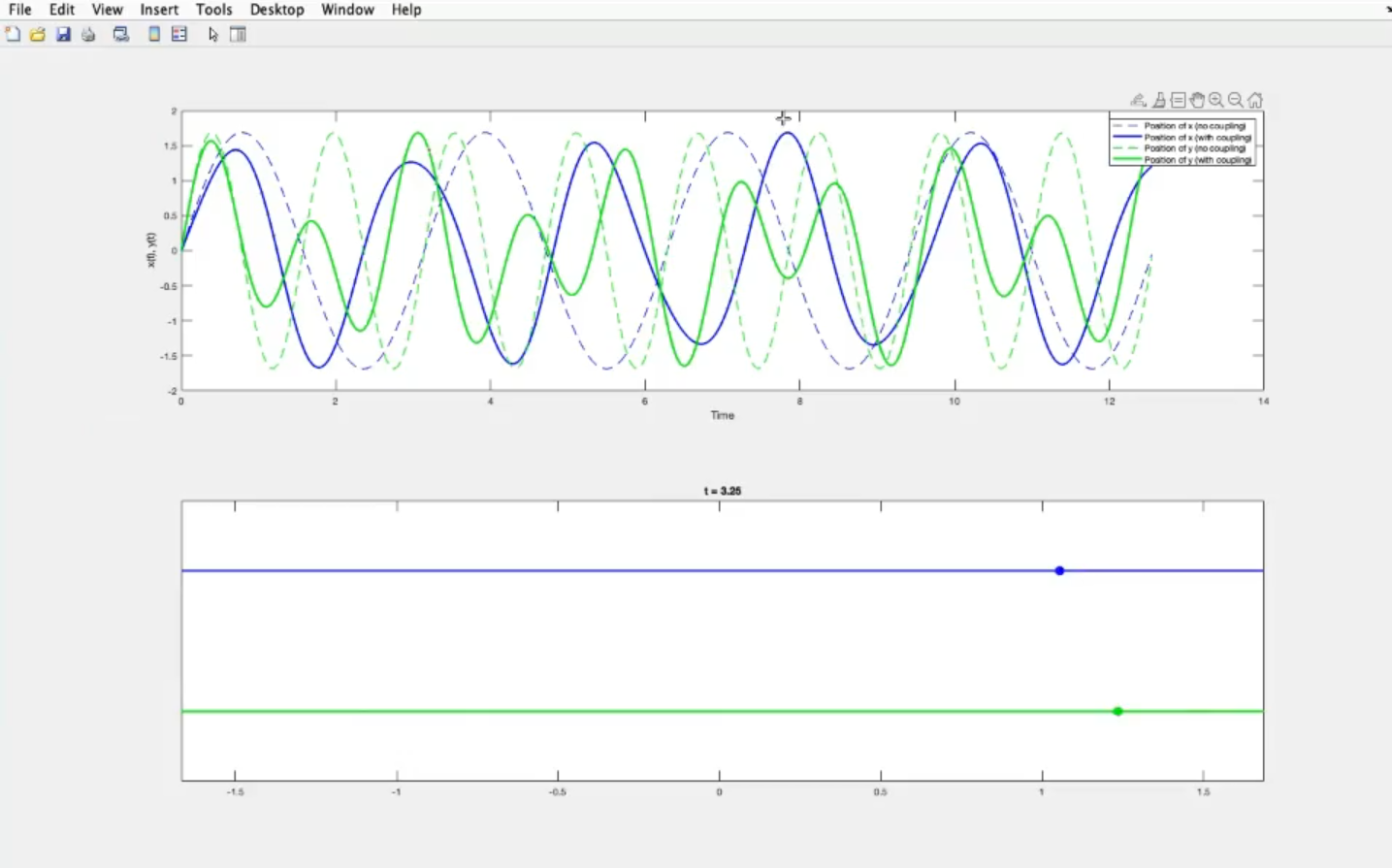
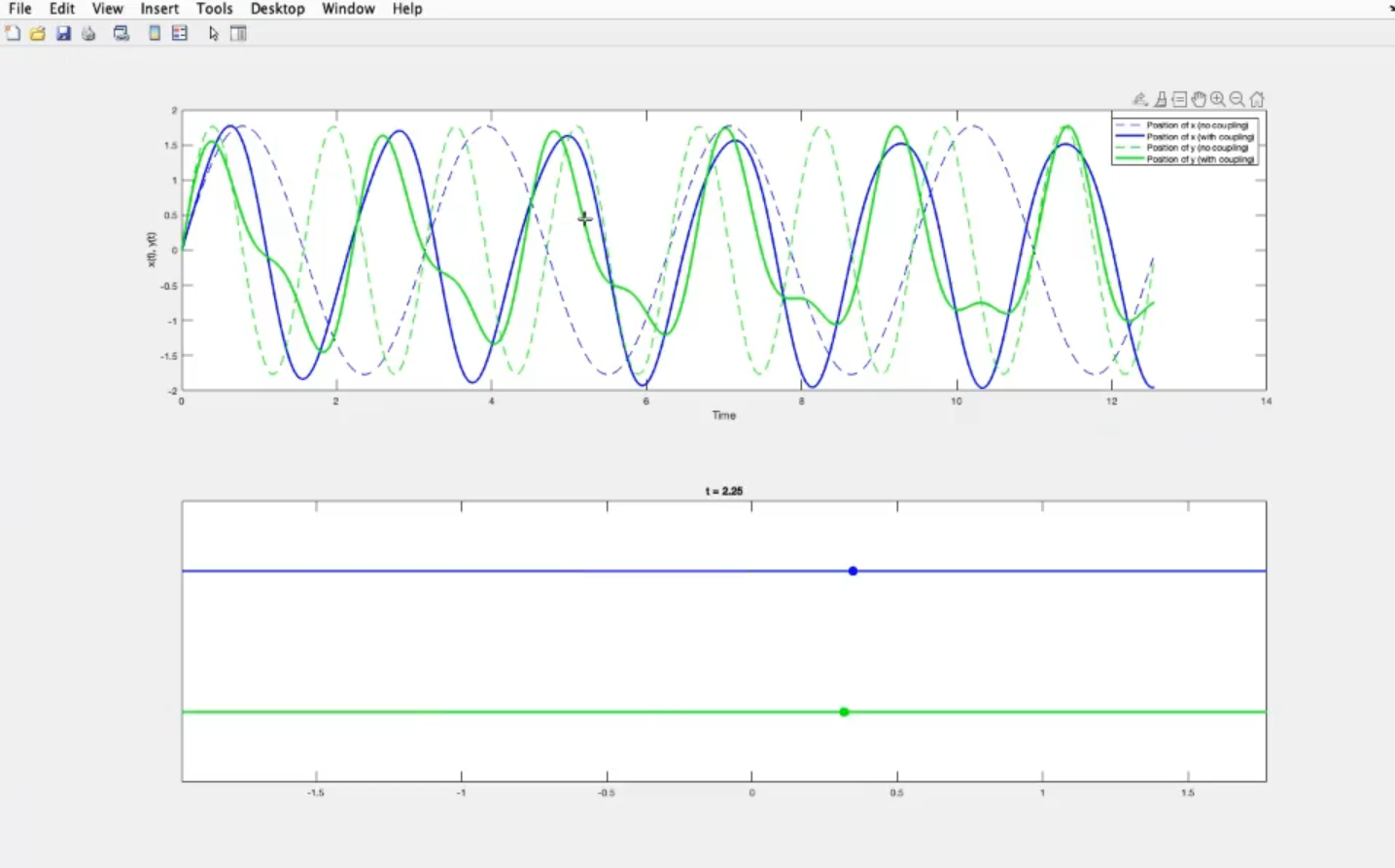
- c=10, we can see that the two lines are much more similar.
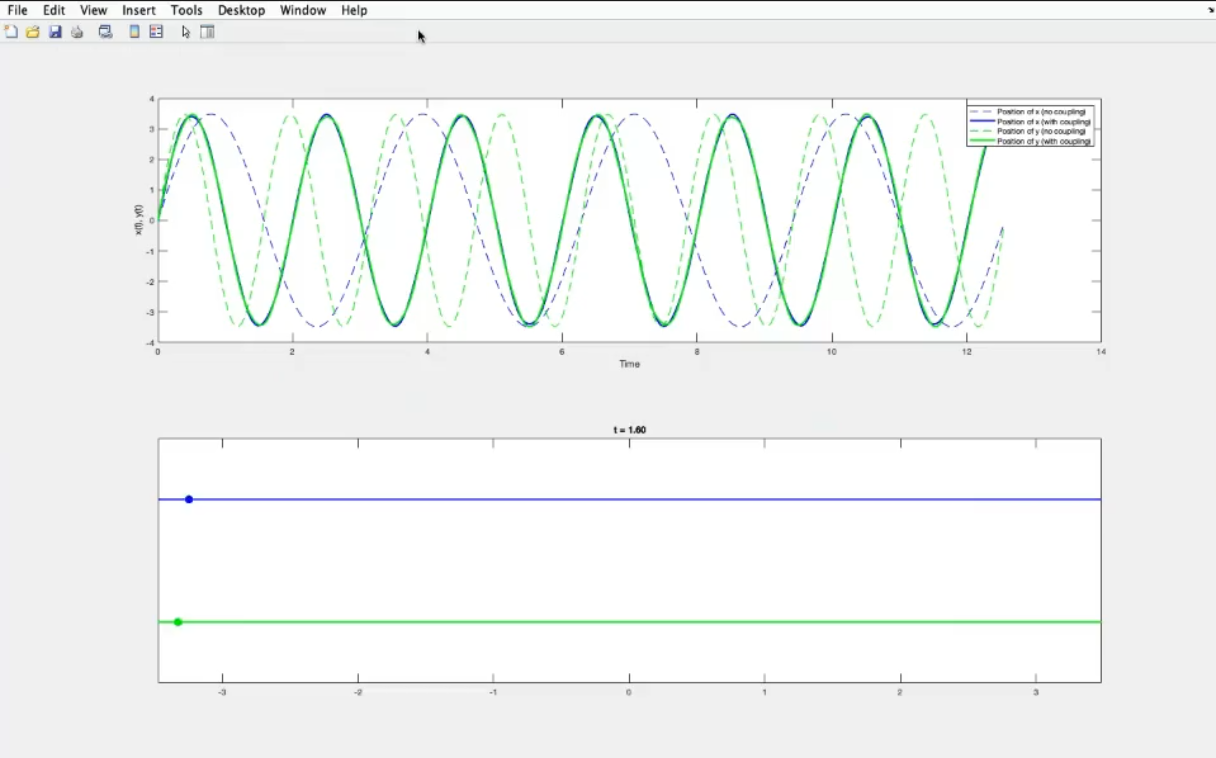
- c=100, almost perfect marching.
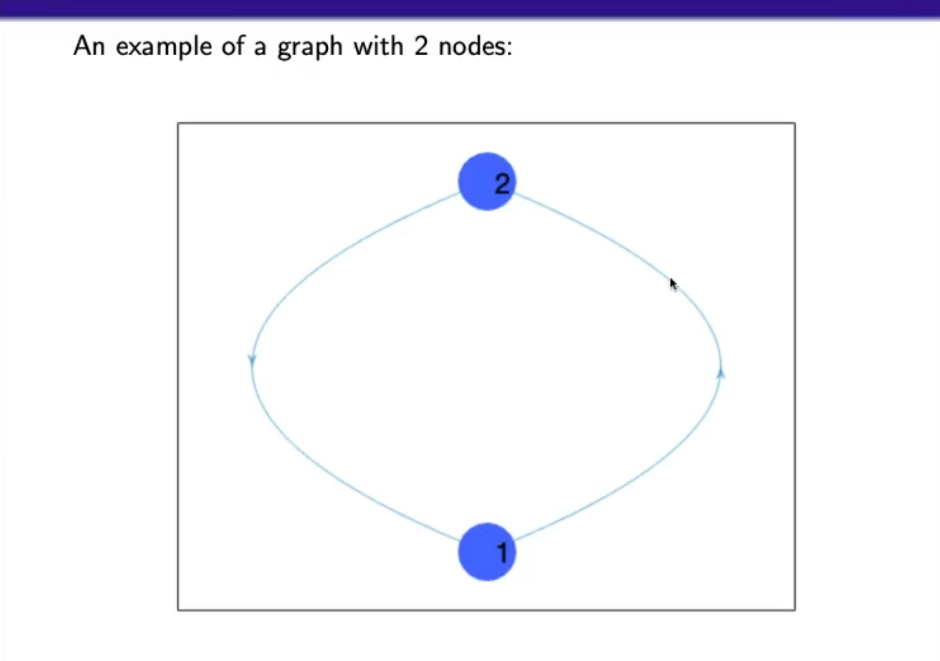
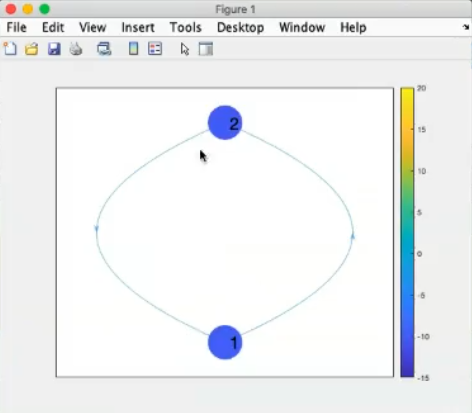
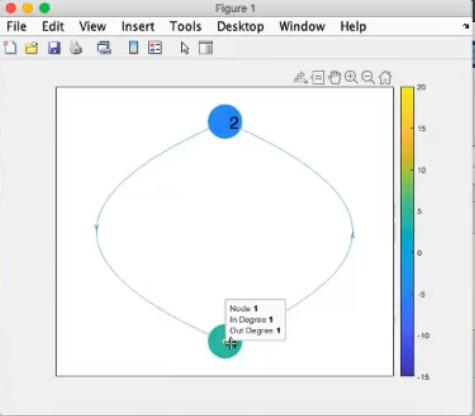
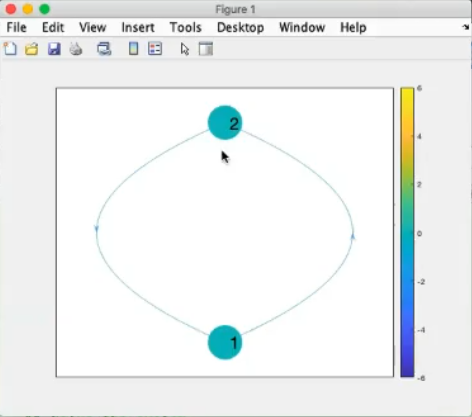
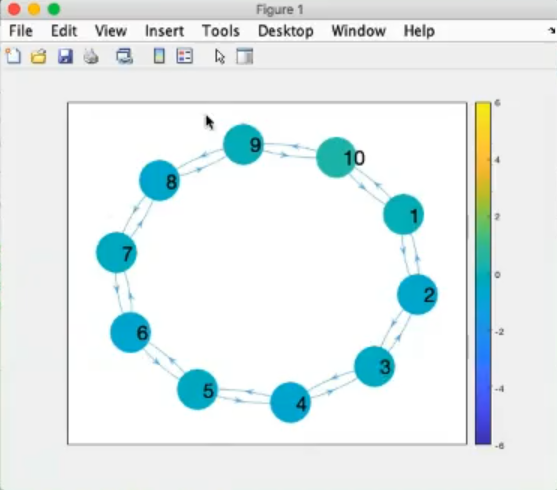
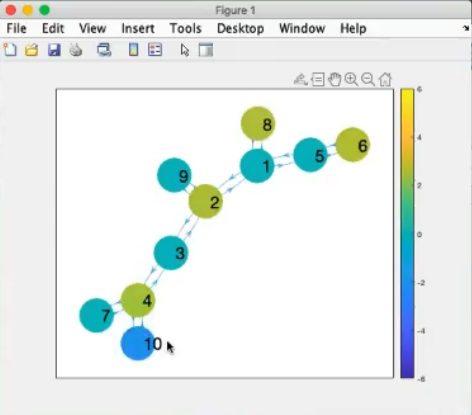
- Graphical representation of the connection.
- Each node is a system.
- REMEMBER: A graph is a mathematical object defined by a given number of nodes and a given number of links connecting the nodes
A graph has many properties, it can be directed or undirected, in this case the graph is directed, since there is a “direction of influence” (the links have arrows).
We will se also other properties.
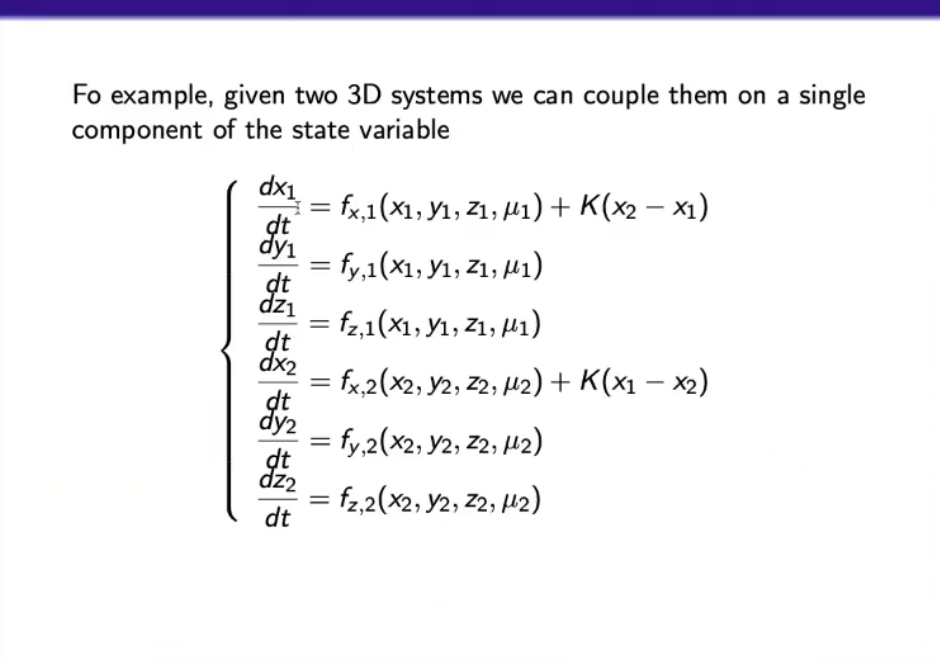
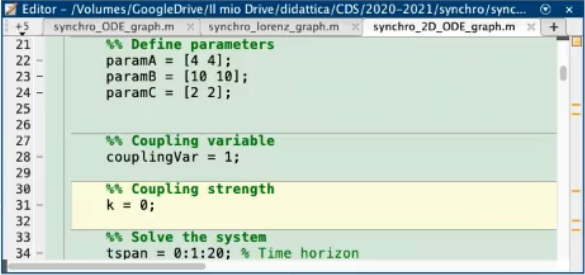
- Now immagine that the simple 2-node graph seen previusly describes two Lorenz systems, connected.
Also consider a “weak coupling”, such that only the variable x1 of the two system is connected to each other: k(x1′−x1′′) and k(x1′′−x1′).
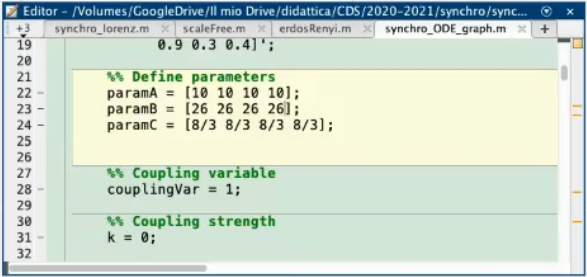
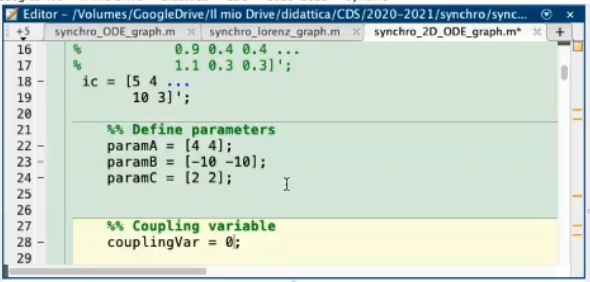
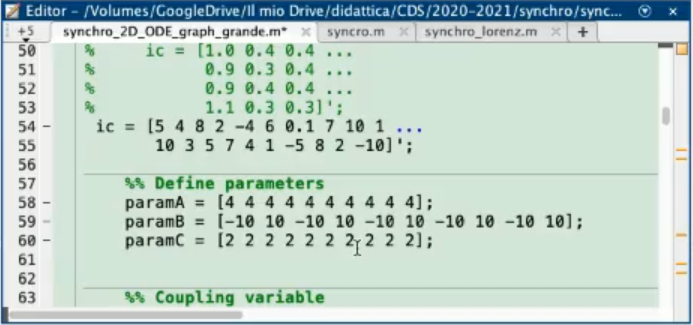
- Base example with k=0 (so we are in the case of no-connection / independent systems), and these are the intial conditions and parameters of the two systems:
paramB: isTODOparamC: isTODO should be σ or somenthing.
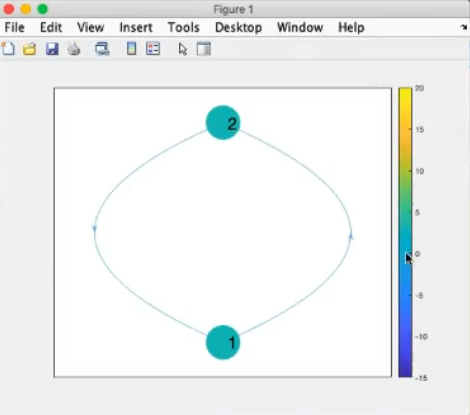
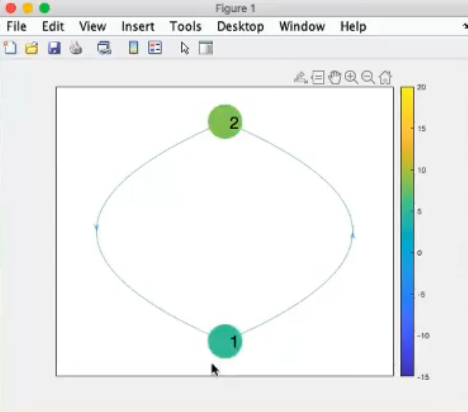
- The color represents the value, it does not change much and it remains near 0.
- It is more or less stable.
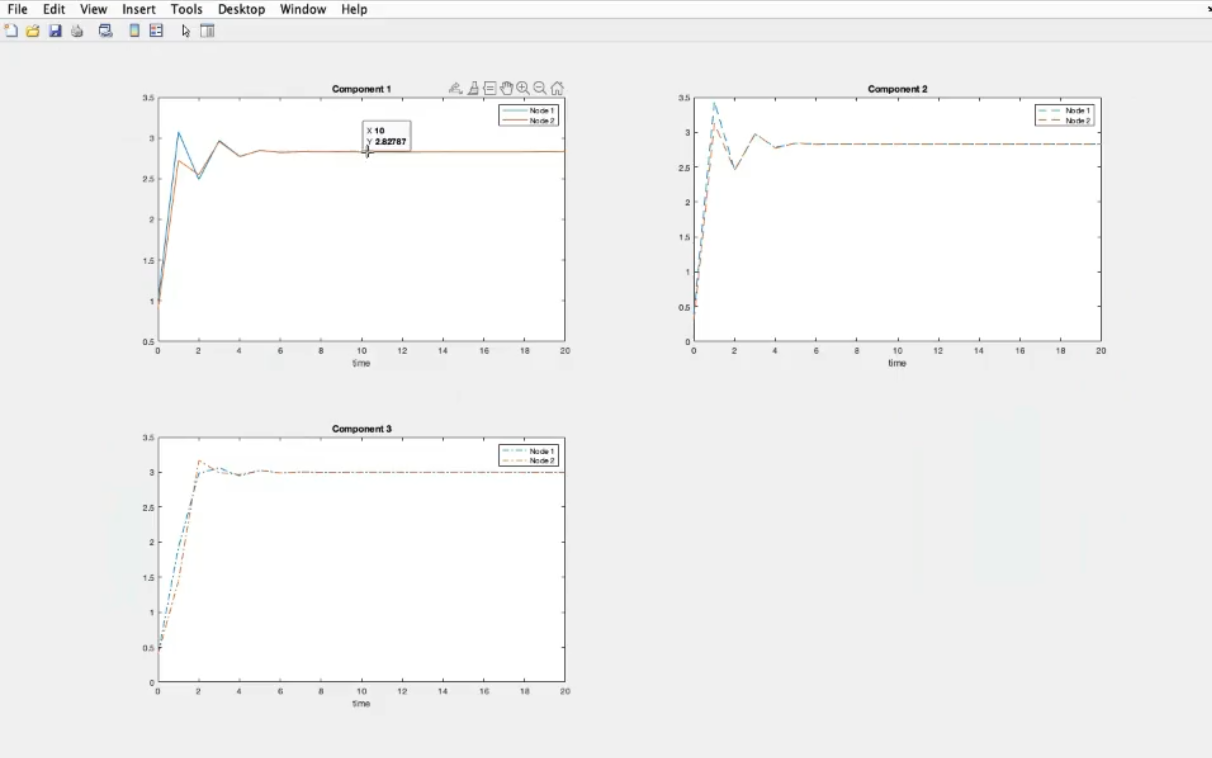
- After solving the system, this are the results, since the system is stable, both system convergee to the same results.
- We hare in the case of “after the pitchfork bifurcation”TODO LINKS TO LORENTS SYSTEM.
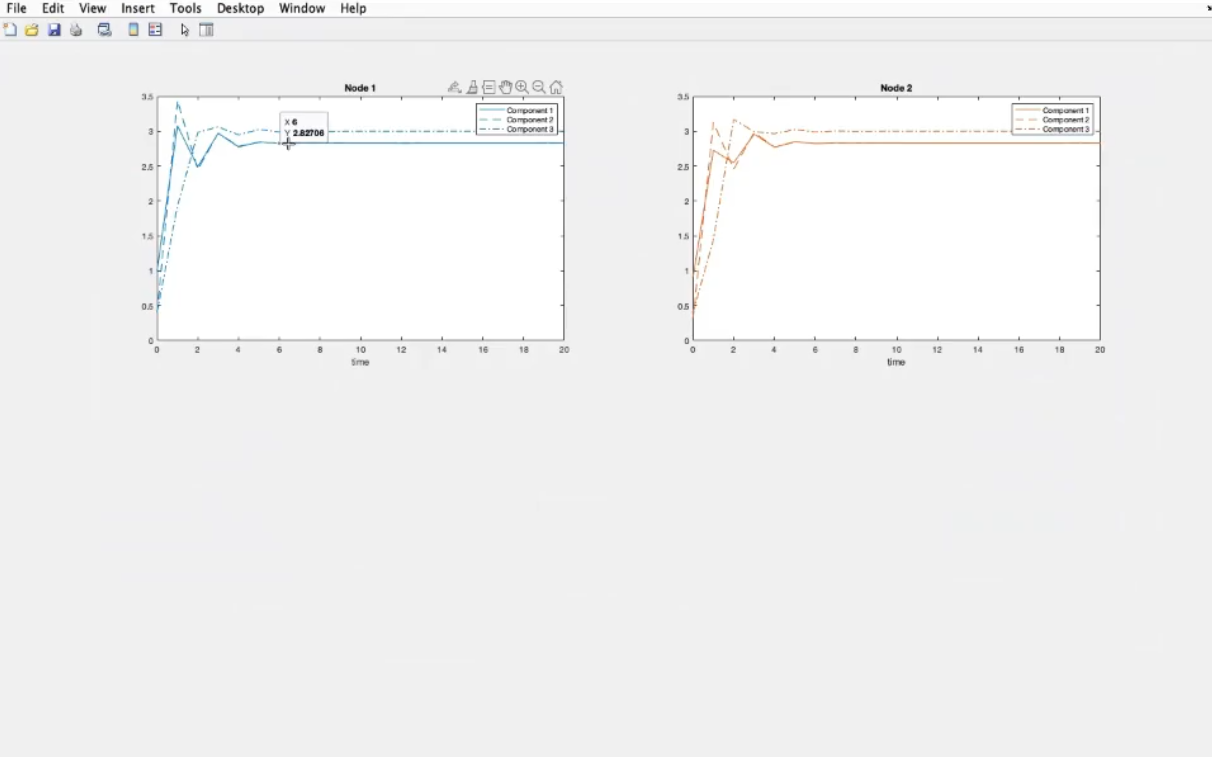
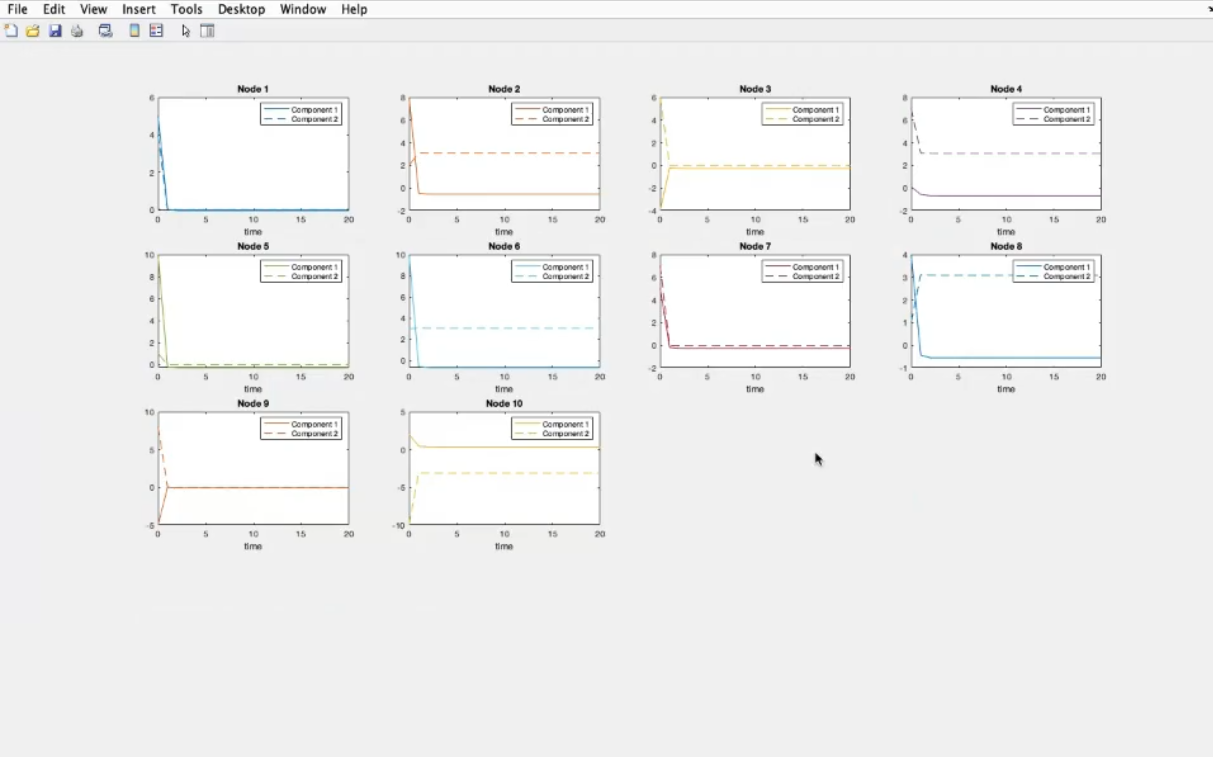
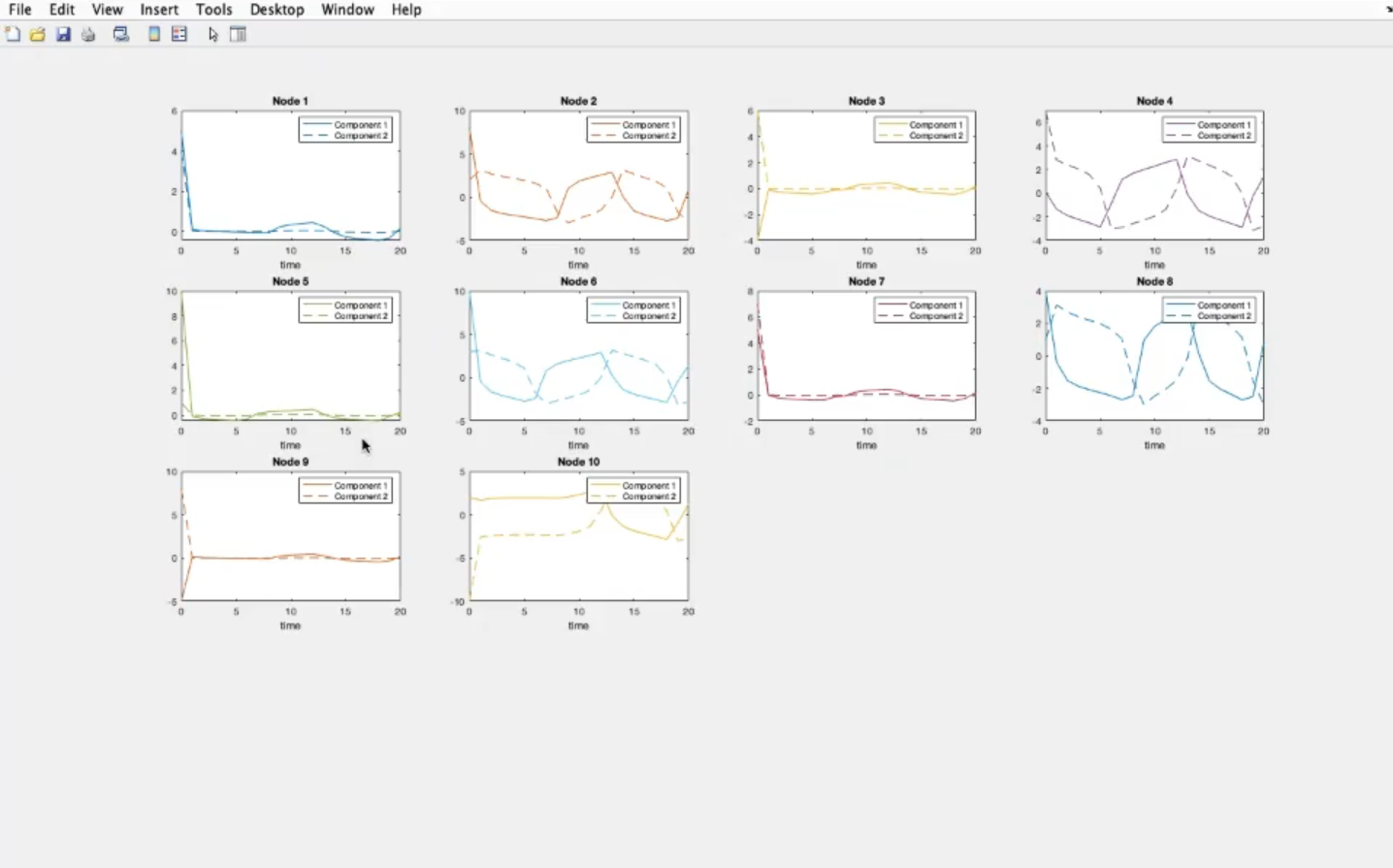
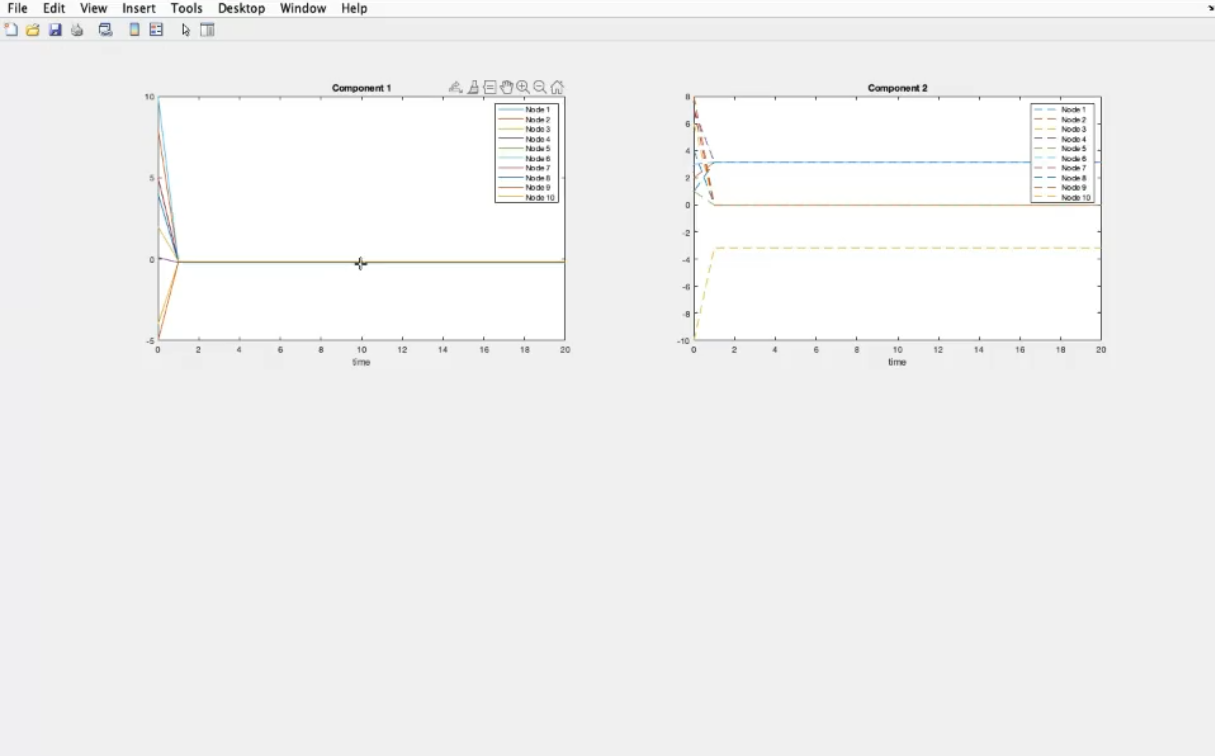
- Here we see the same graphs as before, but divided into the two systems, as you can see the only difference is the transients.
- REMEMBER: We are in the case of indipendent systmes, they converge to the same results because they have the same parameters and are “converging systems”.
- We now move the system into the chaotic regime, by changing
paramB.
- Still k=0 ⇒ indipendent systems.
- The node now change colors frequently, and can assume different colors at the same time, here’s another shot:
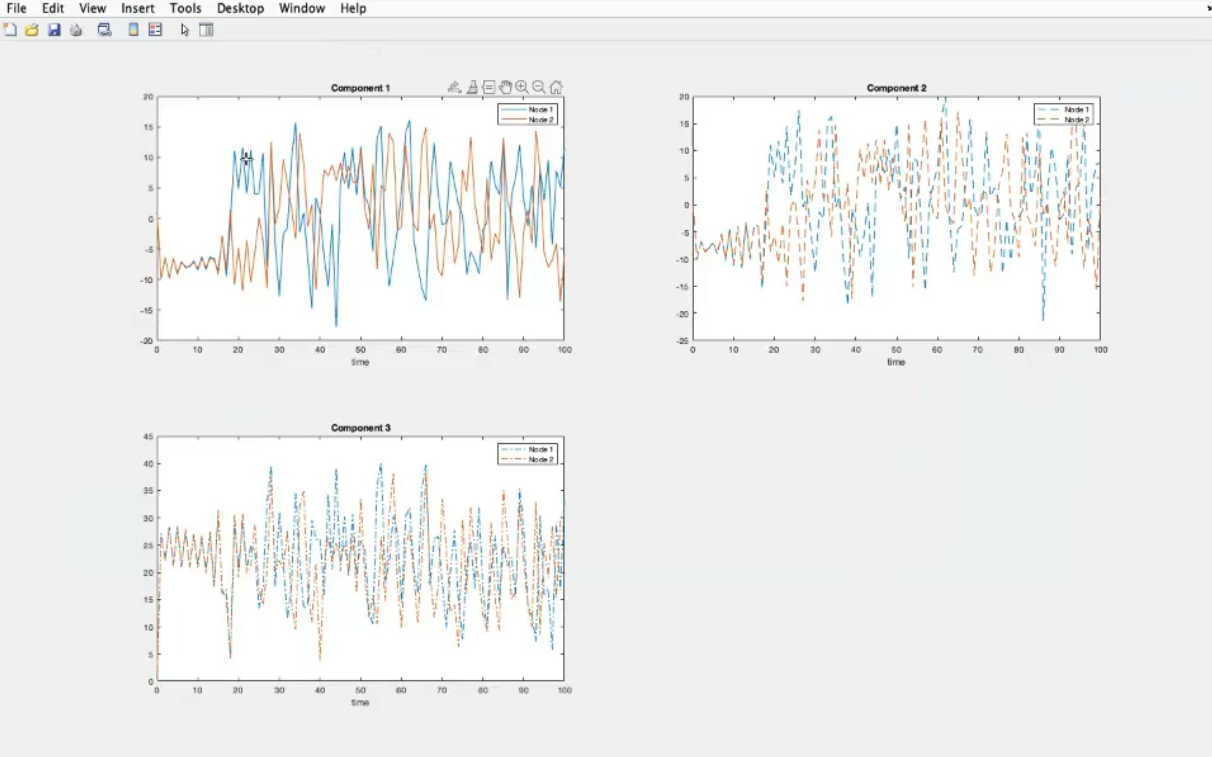
- Division in components, you can see the chaos.
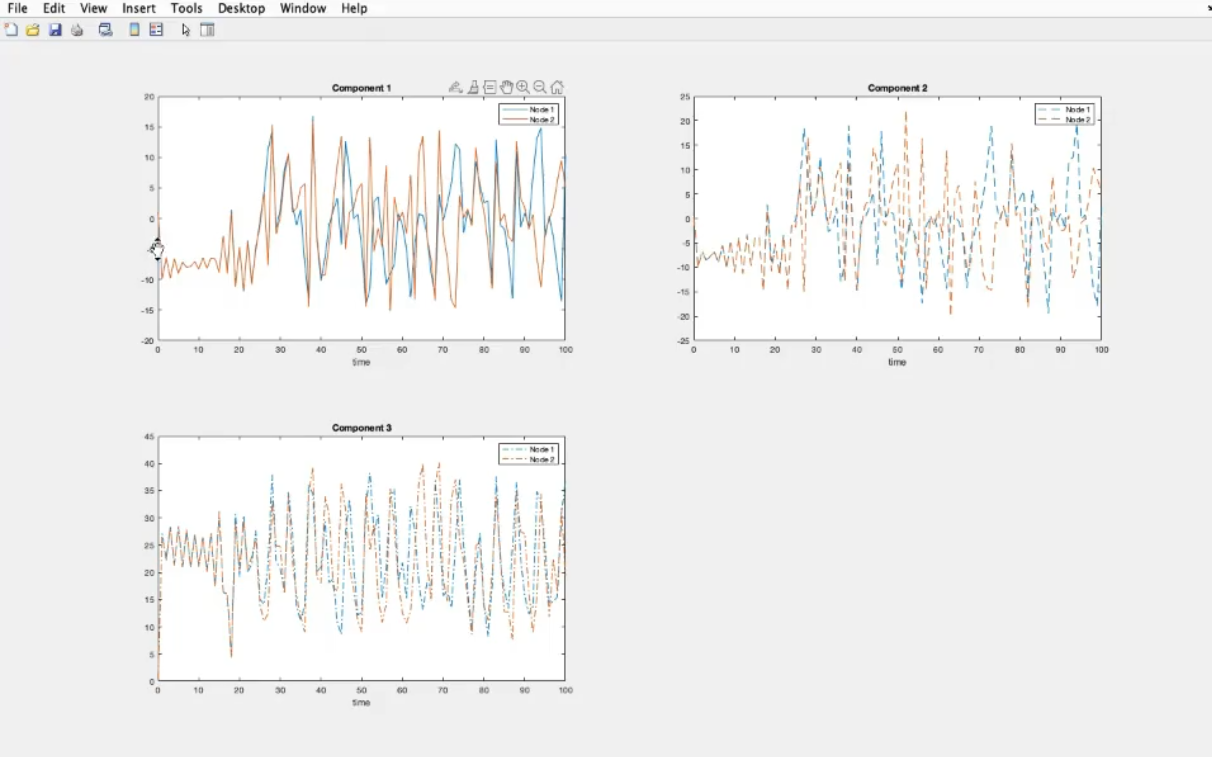
- k=1, results are almosts the same as before.
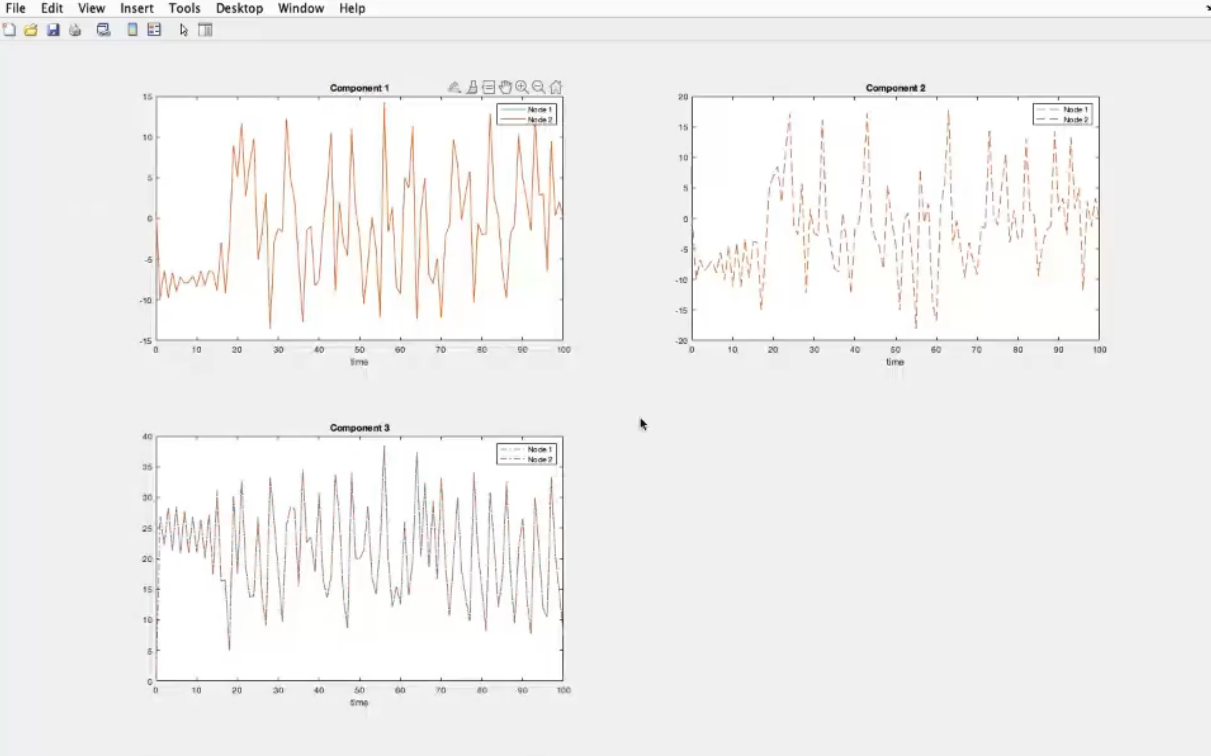
- k=10, much more similar systems ⇒ the two systems are syncronized.
- So we have seen that chaotic system can syncronize.
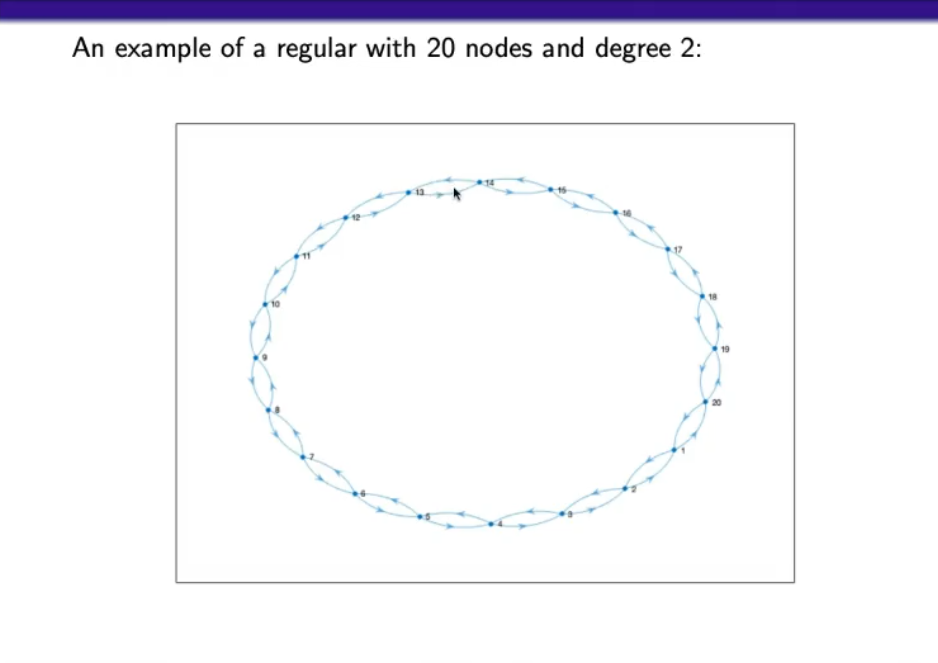
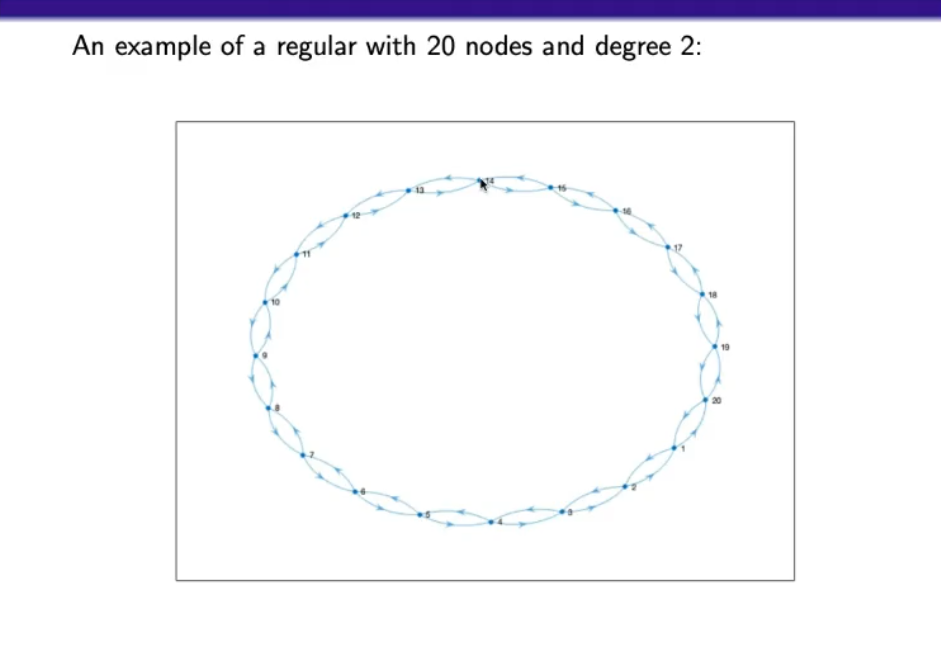
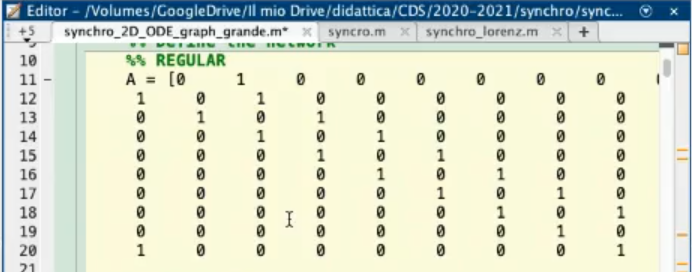
- Bidirectional connections.
- This is called a “ring network”.
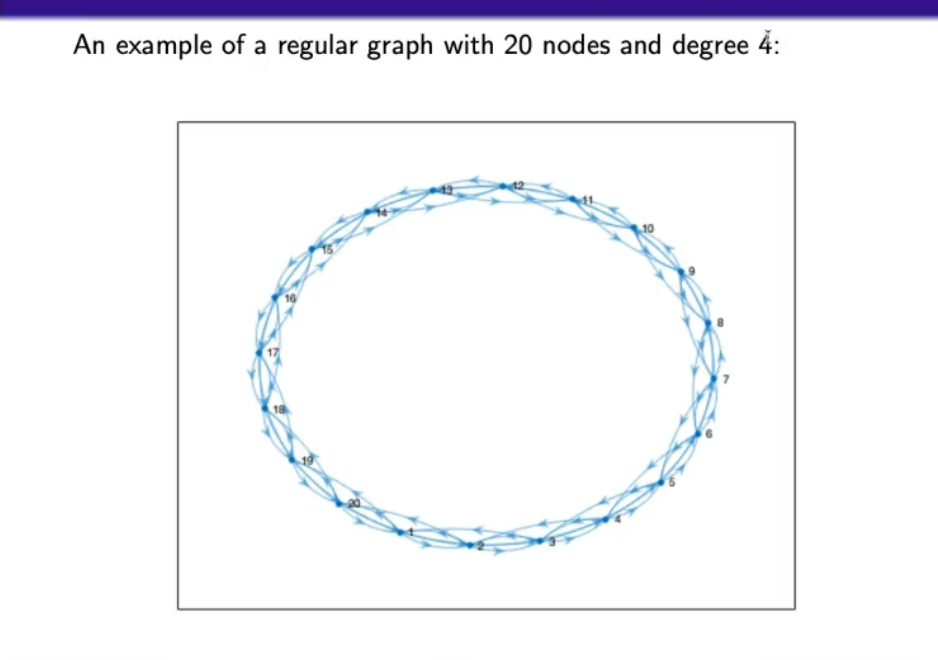
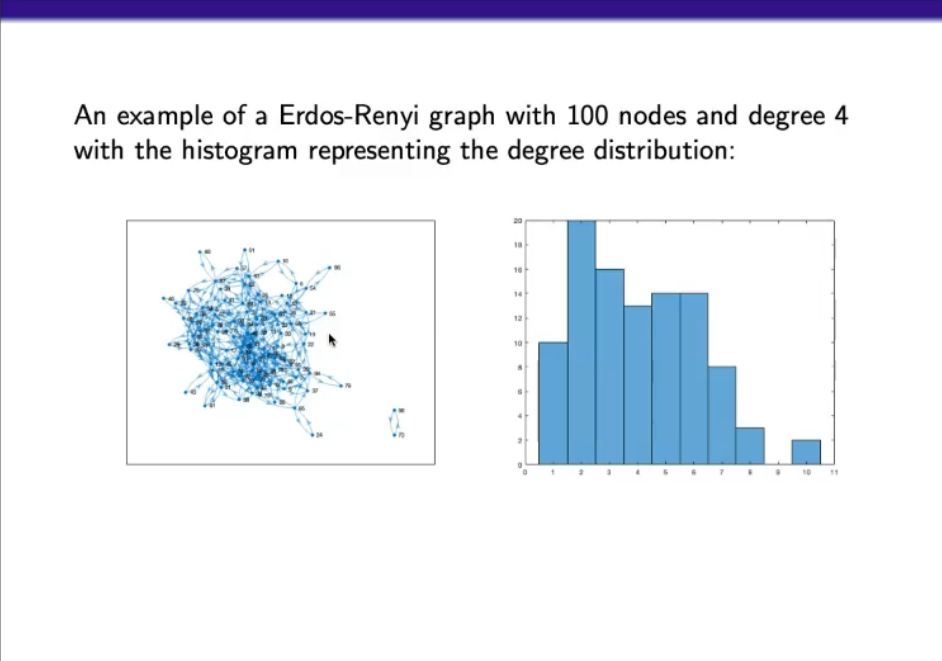
- degree 4: each node is connected to 4 nodes.
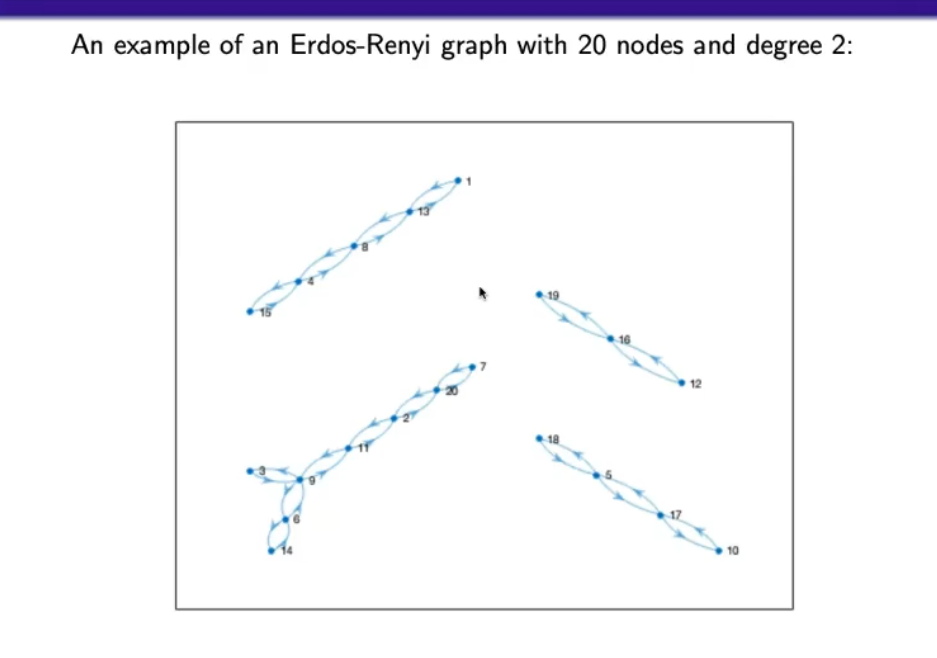
- Erdos-Renyi: random graph, in this case degree 2 refers to a medium of connections.
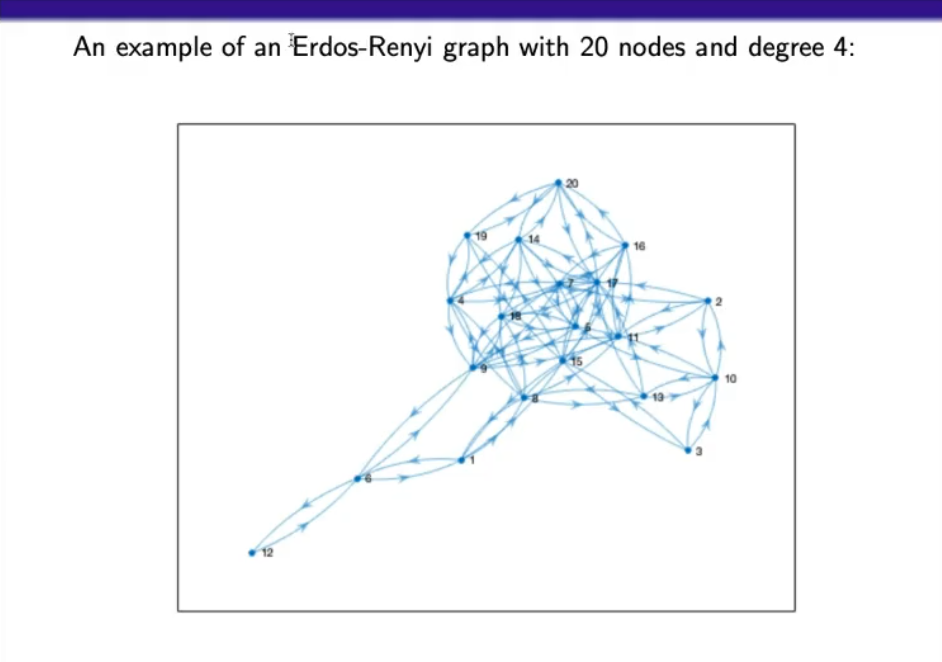
- The
12° node is called a “leaf” (it has very few connections)
- There is only 1 graph (we can always find a list of connections from one node to another)
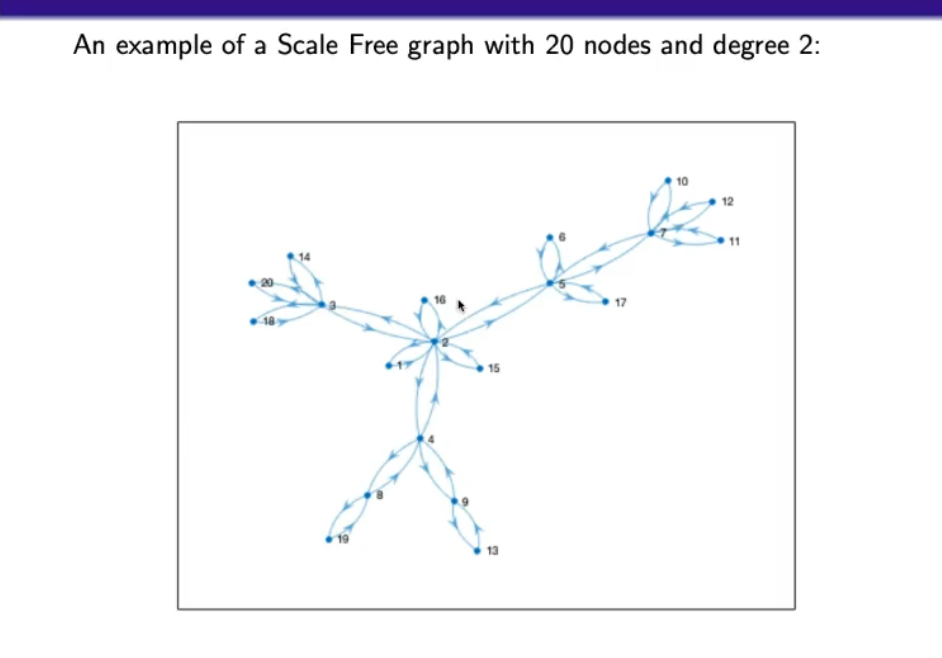
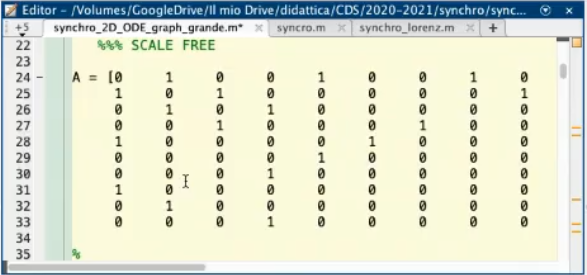
- We can define some hubs like node
2, 3, 4, 5, 7.
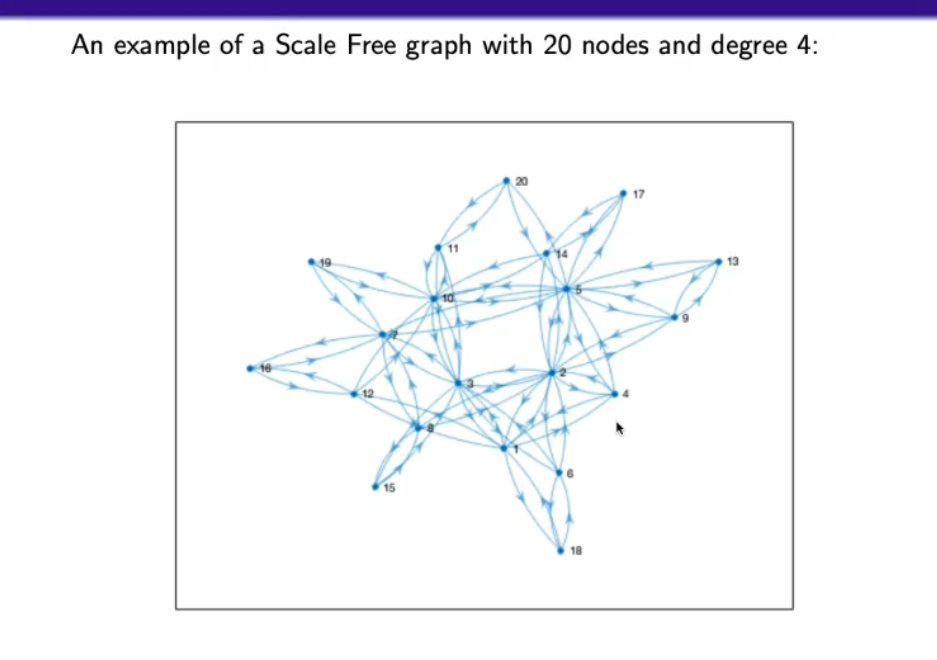
- Still some hubs and leaves.
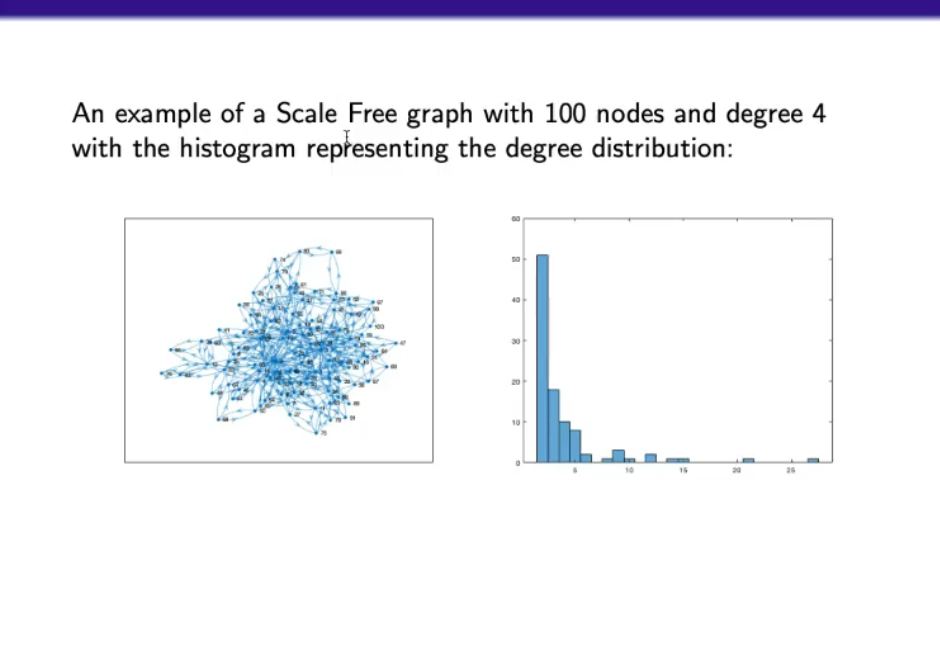
- Many leaves (nodes with little connections).
- Few higher degree nodes, from the picture we can define the hubs.
- There can be separation (not all nodes can reach all the others)
- The maximum degree is lower thatn that of the “Scale Free graph”.
- Each node represents a dynamical system.
- We will see how different type of graph handle changes, how the change of a node can spread, and the syncronization.
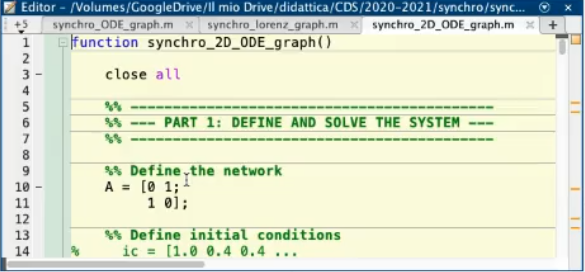
- Simplest graph with only 2 nodes.
- 2 Identical stable systems, with different inital conditions, and NO coupling.
- Changing
paramB, the systems will now oscillate.
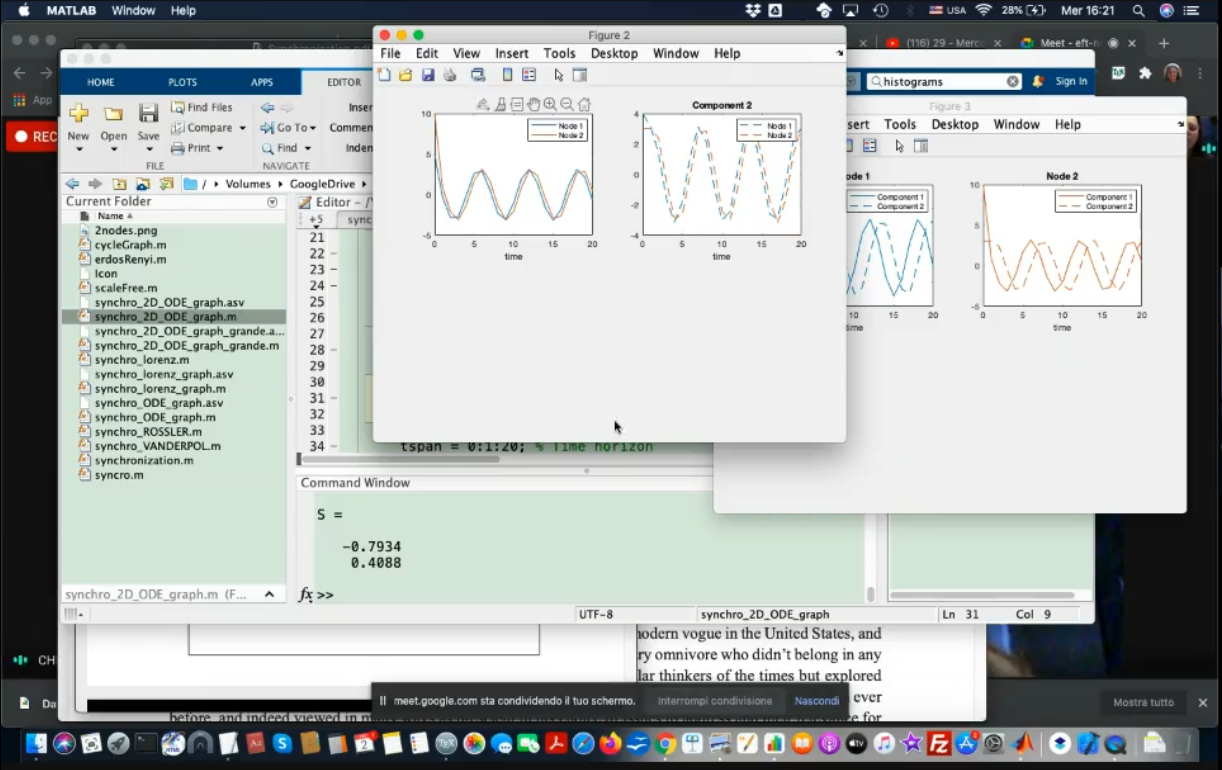
- The two system are slightly different, due to the different inital conditions
- Changing
paramB, this time the systems are diffrent.
- One oscillating and one converging system
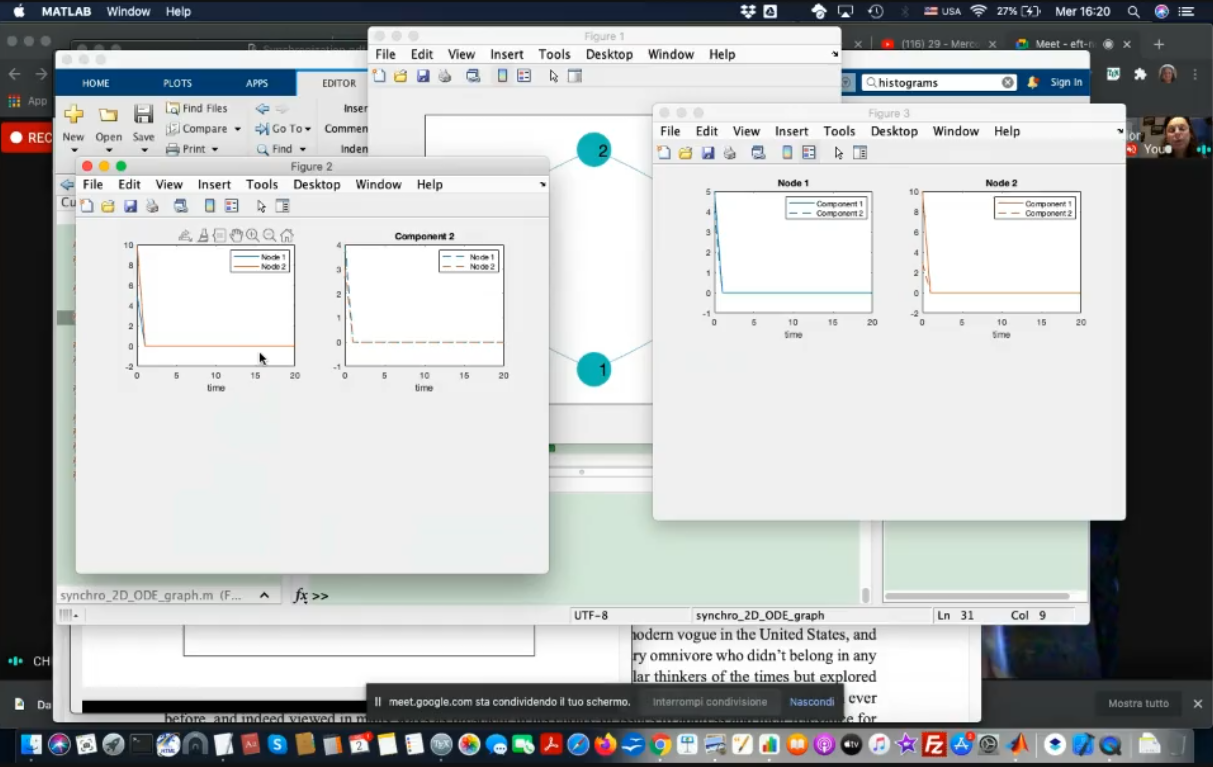
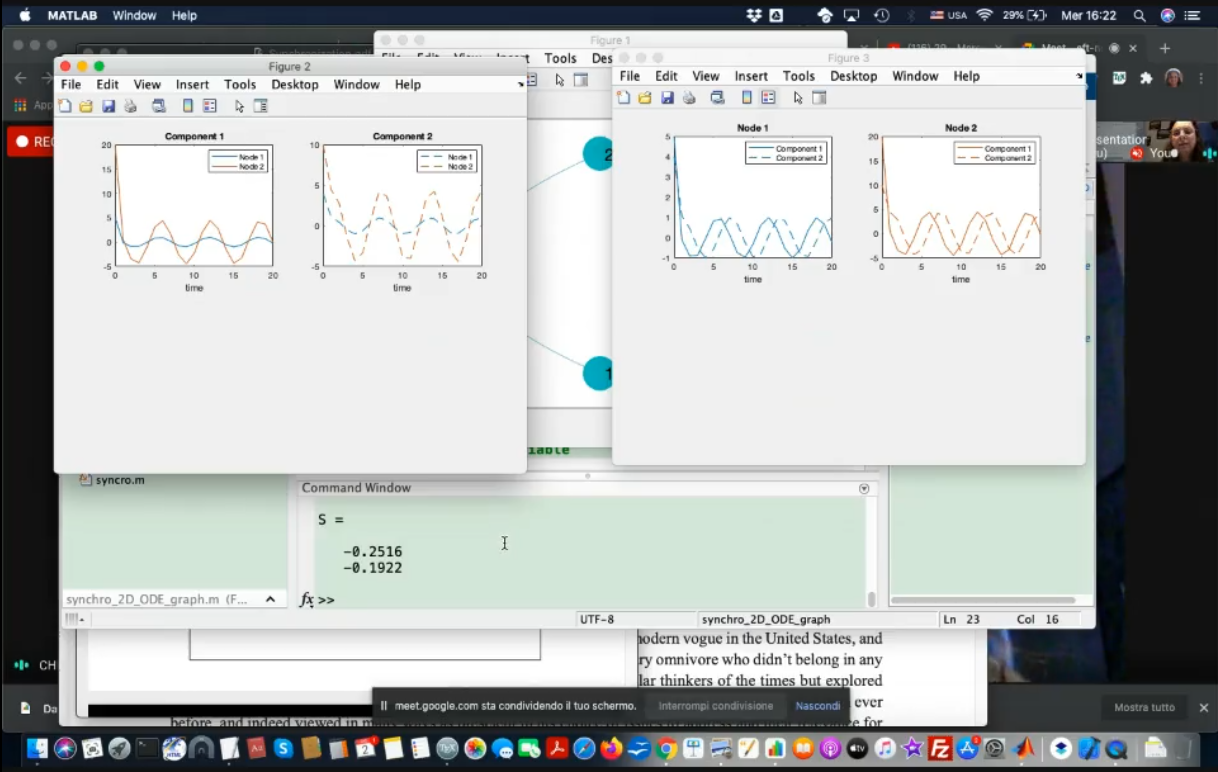
- We now introduce coupling: k=1. (pretty weak)
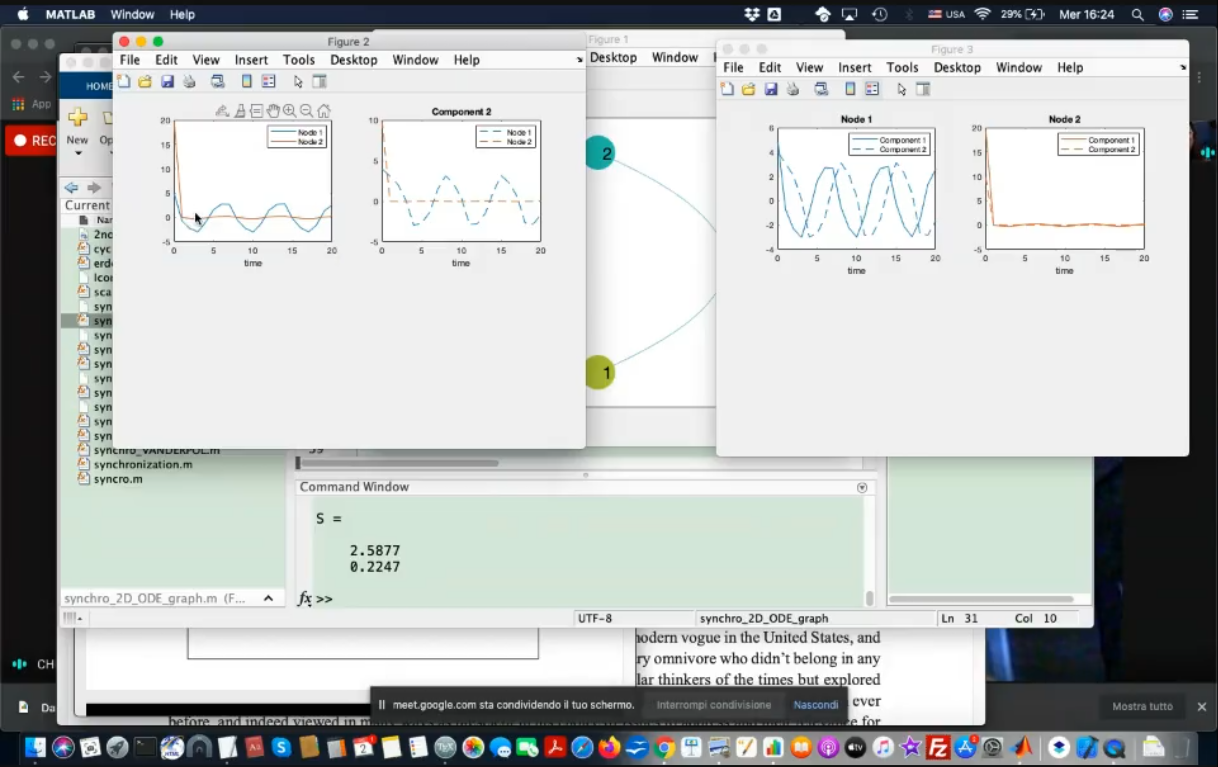
- We can see some effects, but since k is small, not very much.
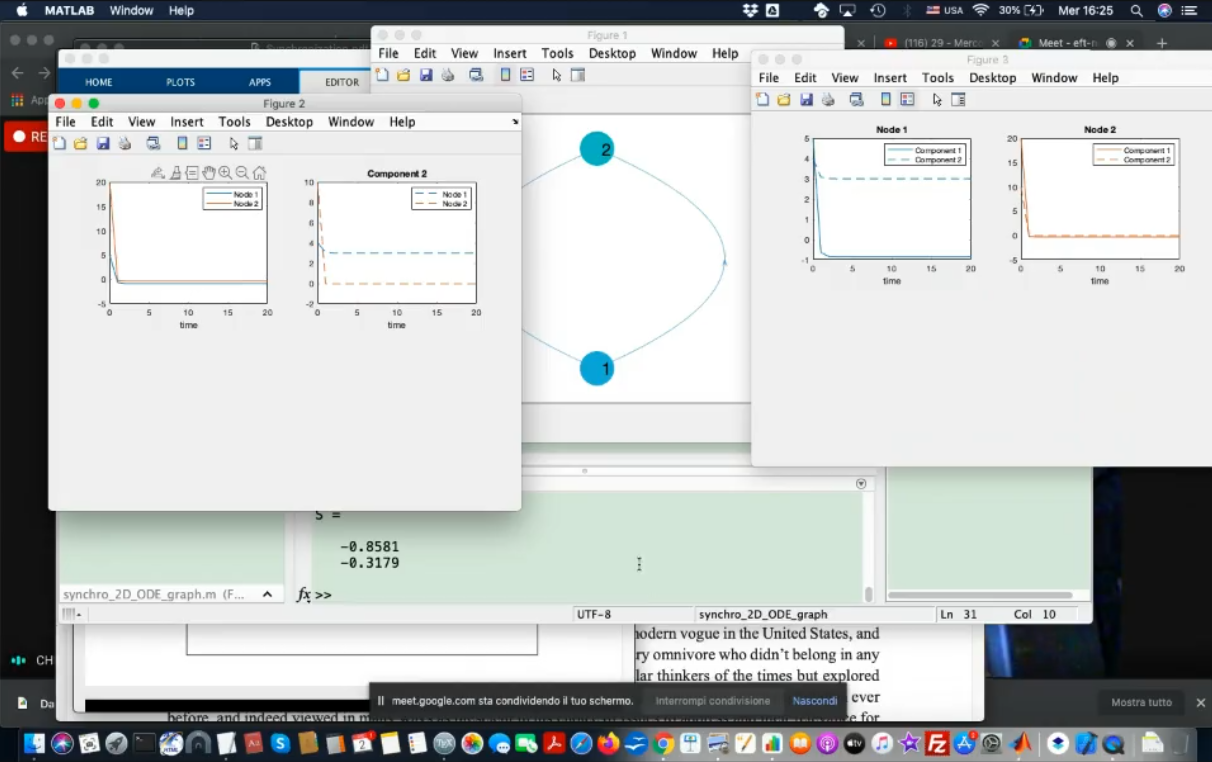
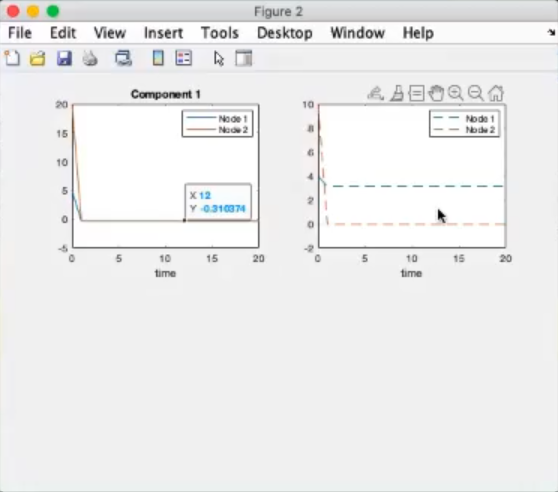
- k=6
- Now both system converge, however the 2nd components converge to different values, specifically to −1 and the other to 3.
The 1st component of both systems converge almost to the same value, since these are the coupled components.
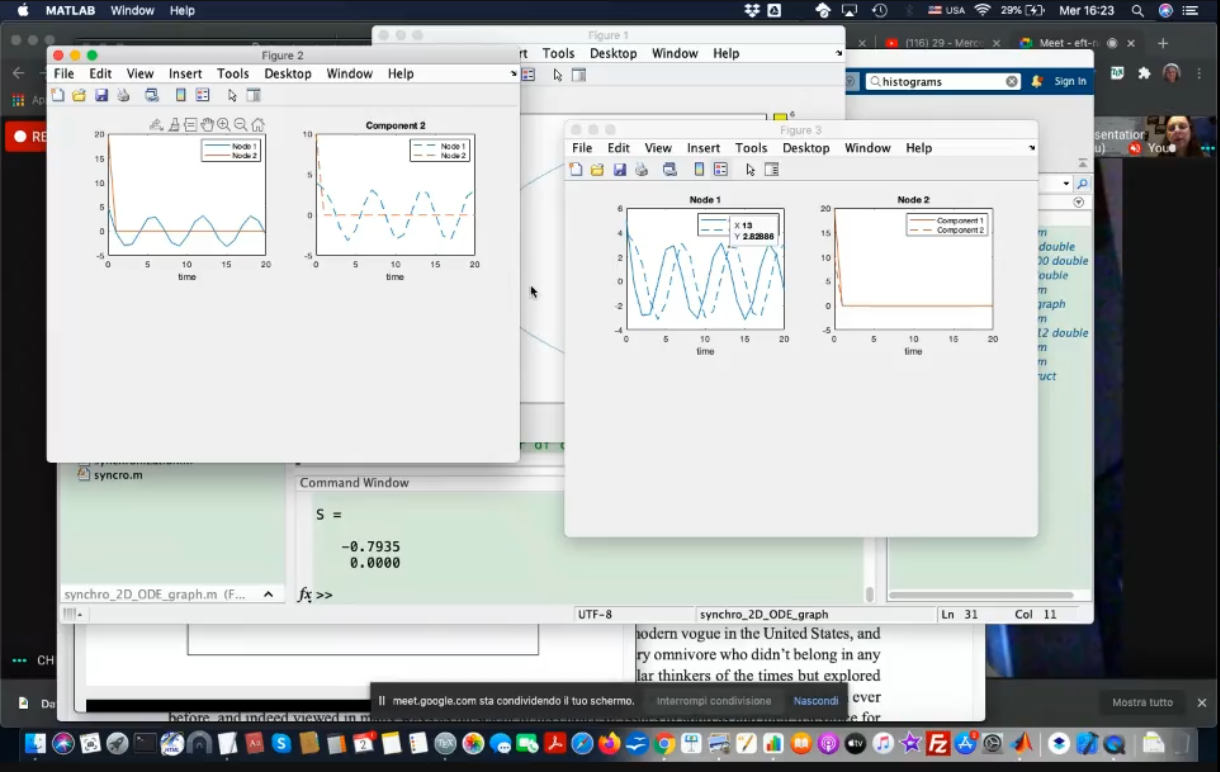
- We switch
coplingVar from 1 >> 2, meaning that now the coupled components are the 2nd ones.
- k=60, the 1st components coincide at regime, the 2nds are still different.
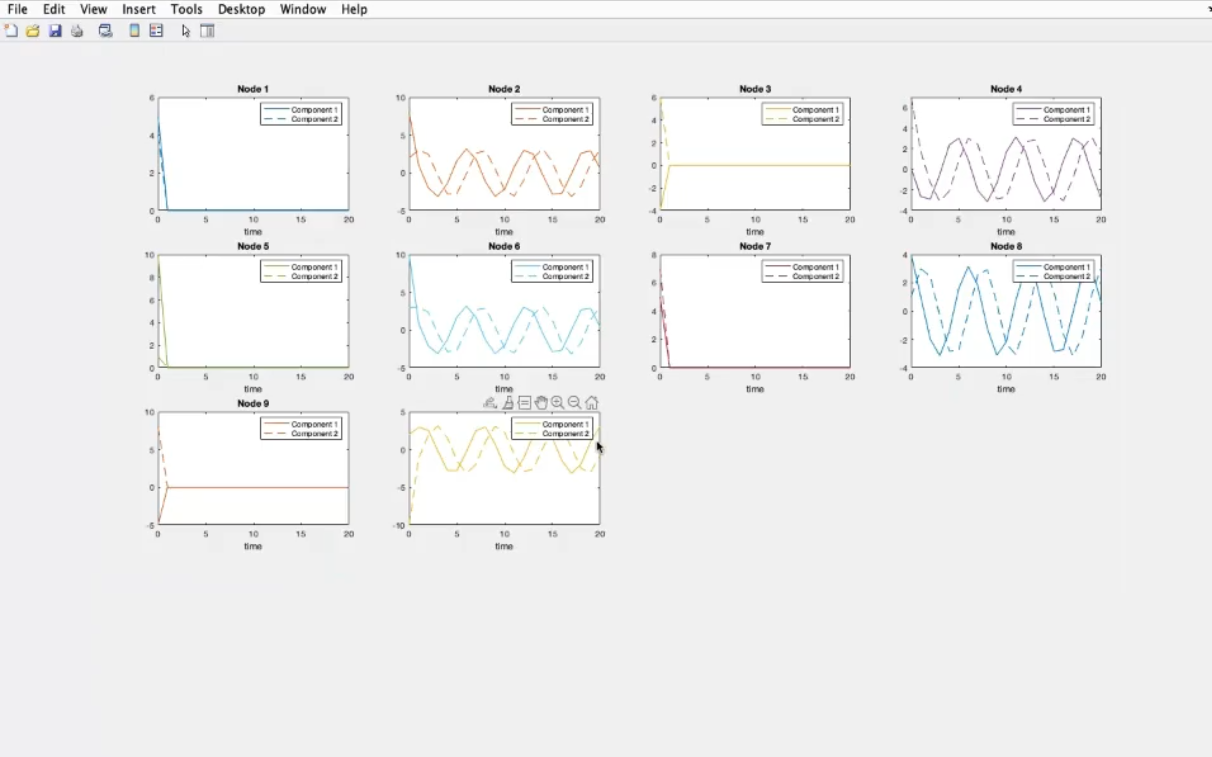
- Regular large network, each node still represents a hopf bifurcation.
- Some node have negative θ some have a positive one.
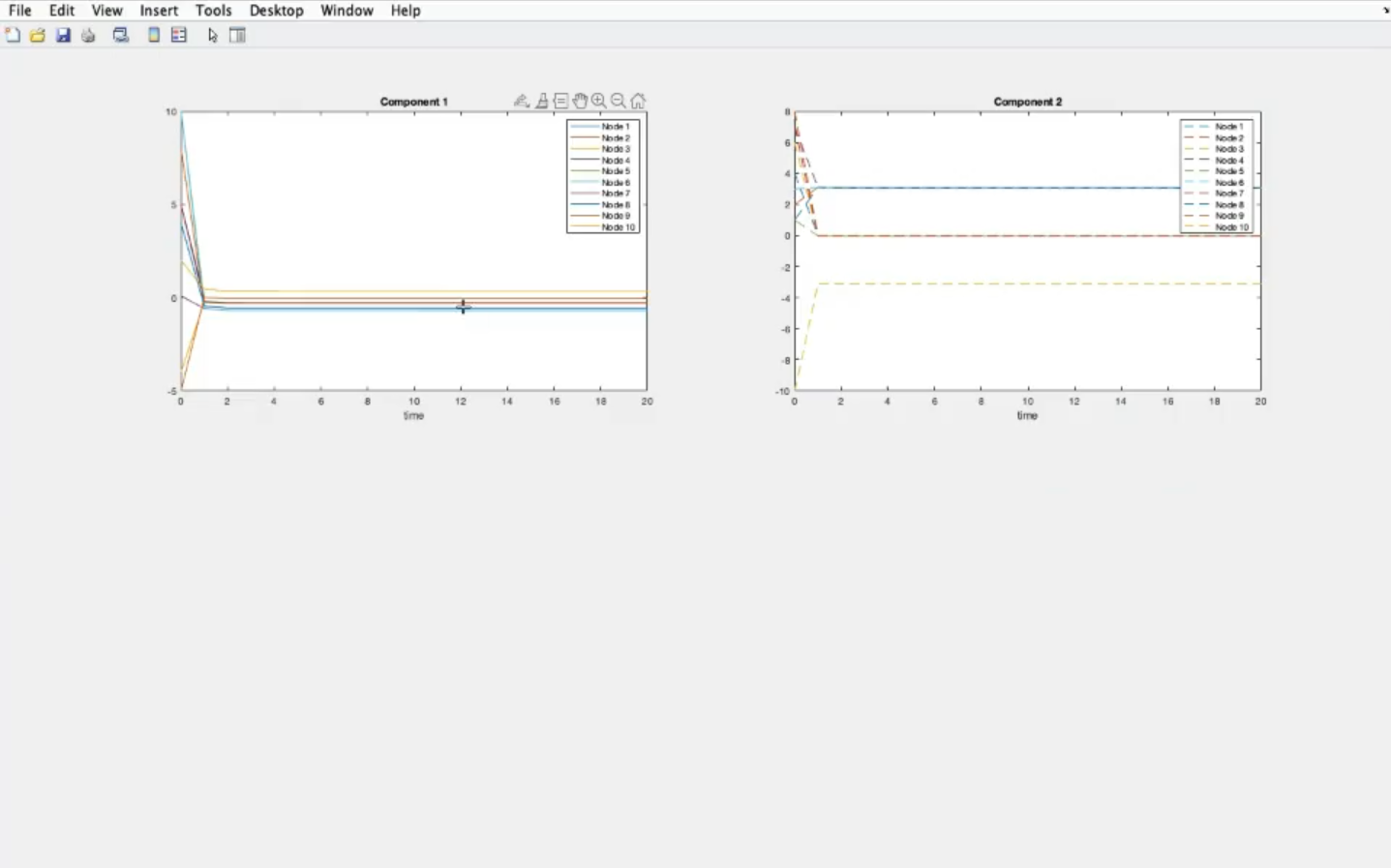
- k=4
- The majority of them should oscillate, but as we can see the converging node help the network stabilize.
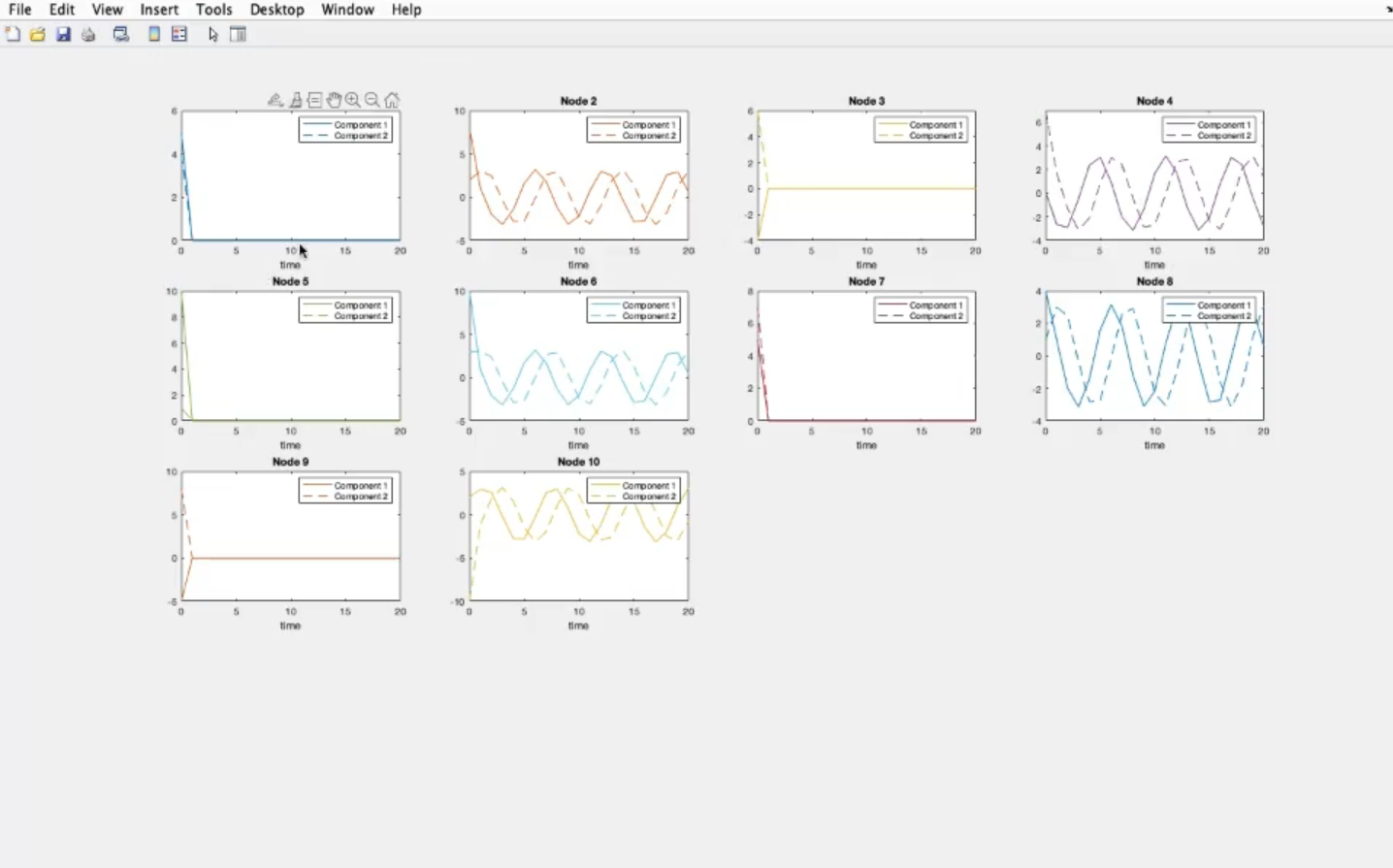
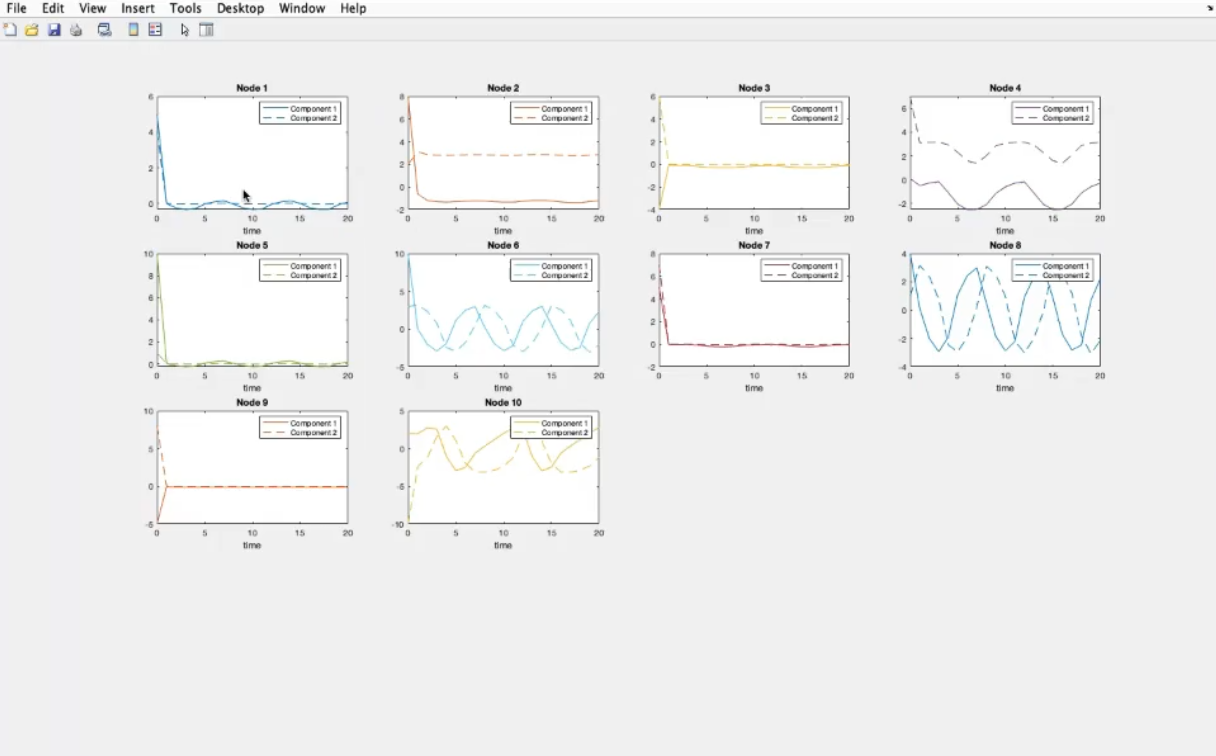
- k=1
- They influence each other, but there is no “dominating system”.
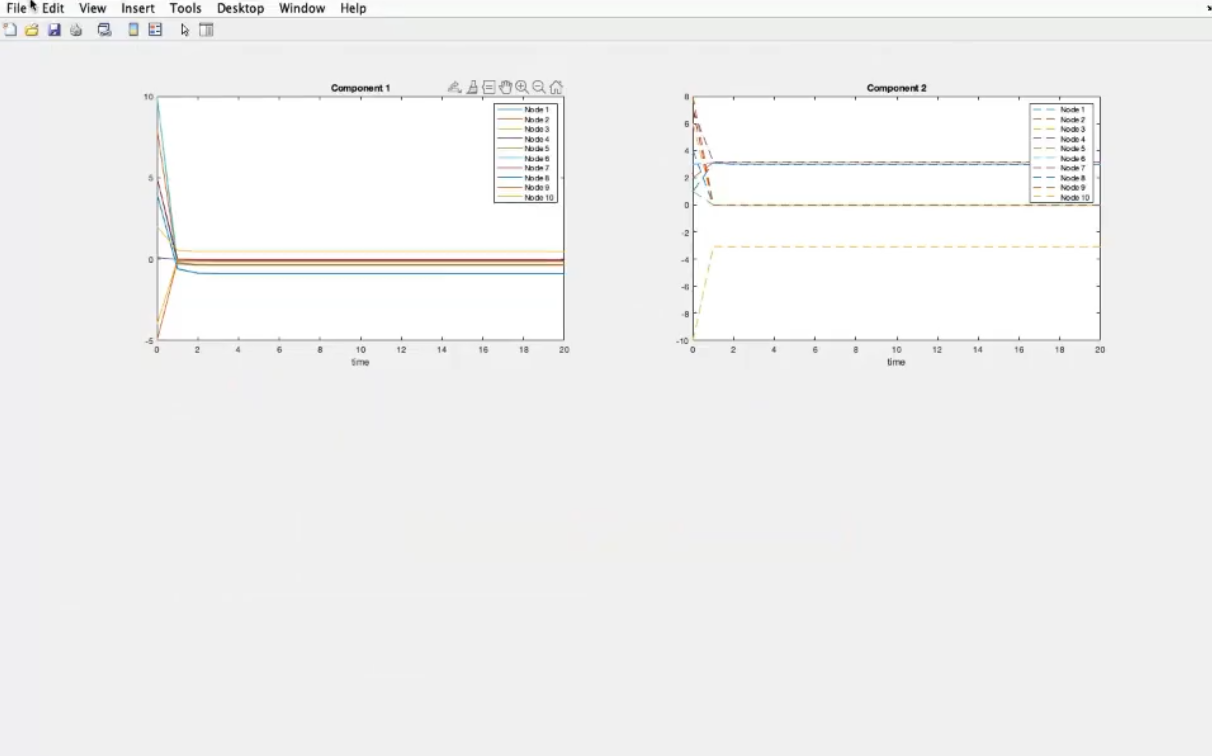
- k=100
- The system is stabilized.
- Now we change the shape of the network/graph.
- k=6
- The system is syncronized.
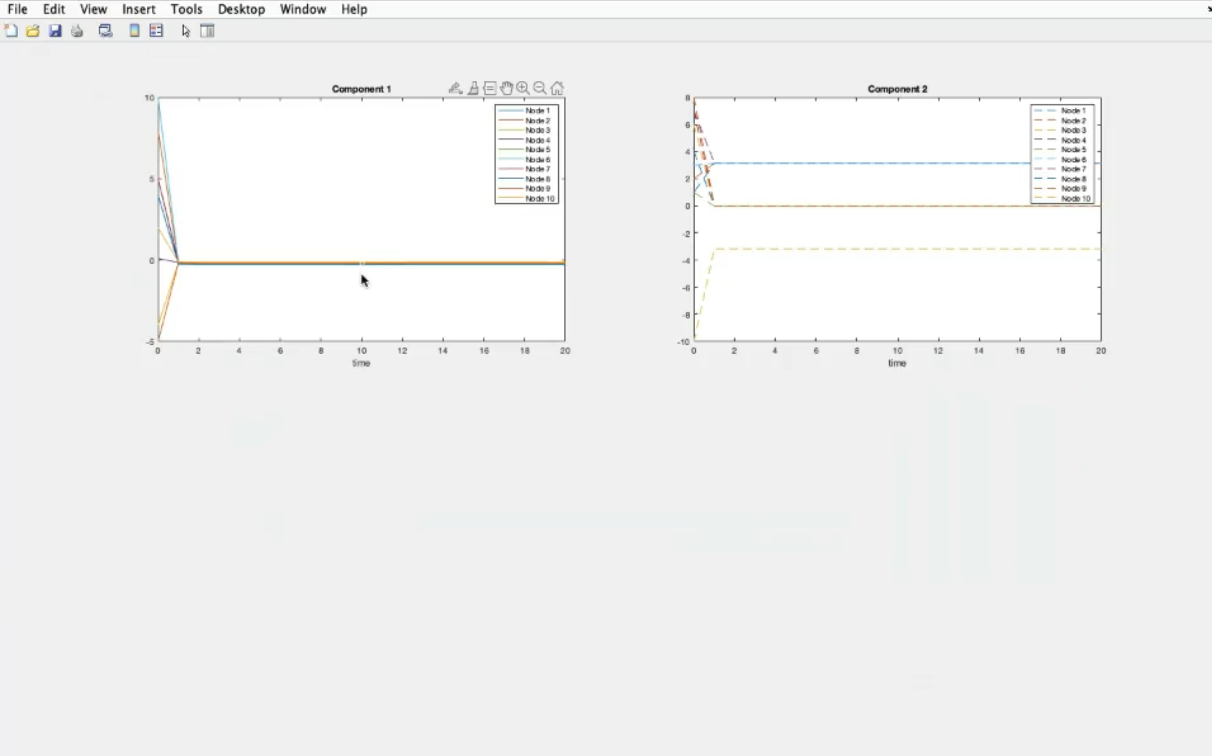
- k=100
- The system is stabilized.
- NOTE: In this case the shape of the network does not change much about stability or syncronization, but (in general) it absolutely can.