- The system is Non-Linear but Locally Linear, the function of state-update and measurement will be locally linearized.
- We know that the pdf of is approximately a Gaussian distribution.
NOTE: means: pdf (probability distribution function) of knowing the measurements () up to time .
- In case the approximation is not satisfactory, for example:
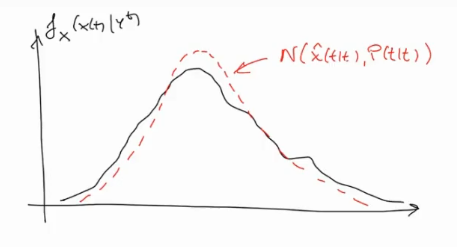 real distribution (in black), resulting distribution (in red).
We can use more accurate alternatives:
The UKF (Unscented Kalman Filter).
Or the PF (Particle Filter).
real distribution (in black), resulting distribution (in red).
We can use more accurate alternatives:
The UKF (Unscented Kalman Filter).
Or the PF (Particle Filter).