- Starting Knowledge:


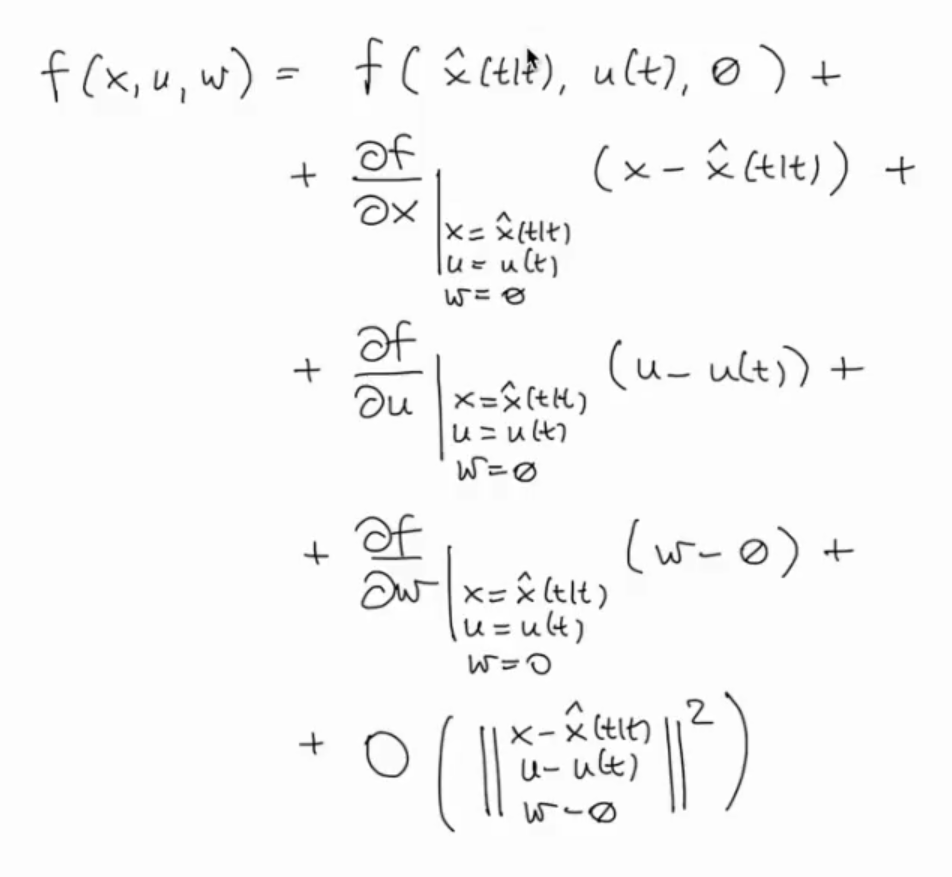
- Taylor expansion on the function:
- Neglect the last term and we obtain:
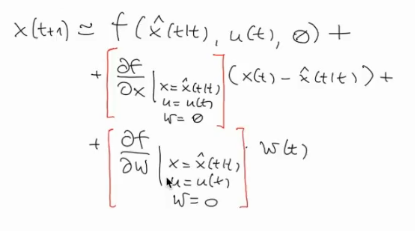 Where:
and are Jacobean matrices
So we can re-write as:
Where:
and are Jacobean matrices
So we can re-write as:

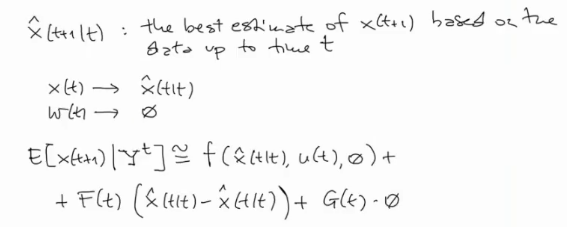
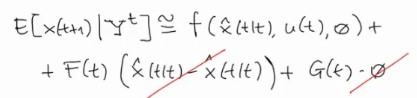
- Calculate the estimate of :

- We have defined as the covariance matrix of the error of the prediction and true value , so:


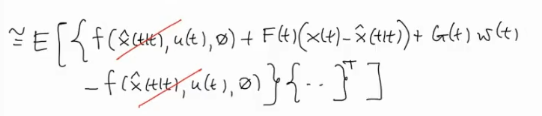

Exactly like in the linear case, the only difference is that and are now time varying matrices, so because and are uncorrelated we can write:
From the definition we gave to we have that:
And from the definition of Covariance Matrix, and knowing that the mean of is :
We can conclude that:
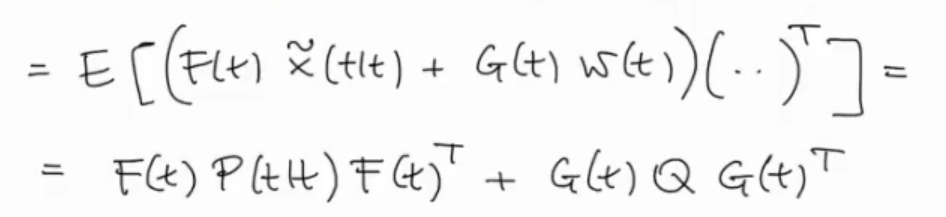 And obtain the 2nd formula of the EKF algorithm:
And obtain the 2nd formula of the EKF algorithm:
 5. We can now start with the correction step:
5. We can now start with the correction step:
 The following step will be very similar to the previous ones.
6. Taylor expansion of the function:
The following step will be very similar to the previous ones.
6. Taylor expansion of the function:
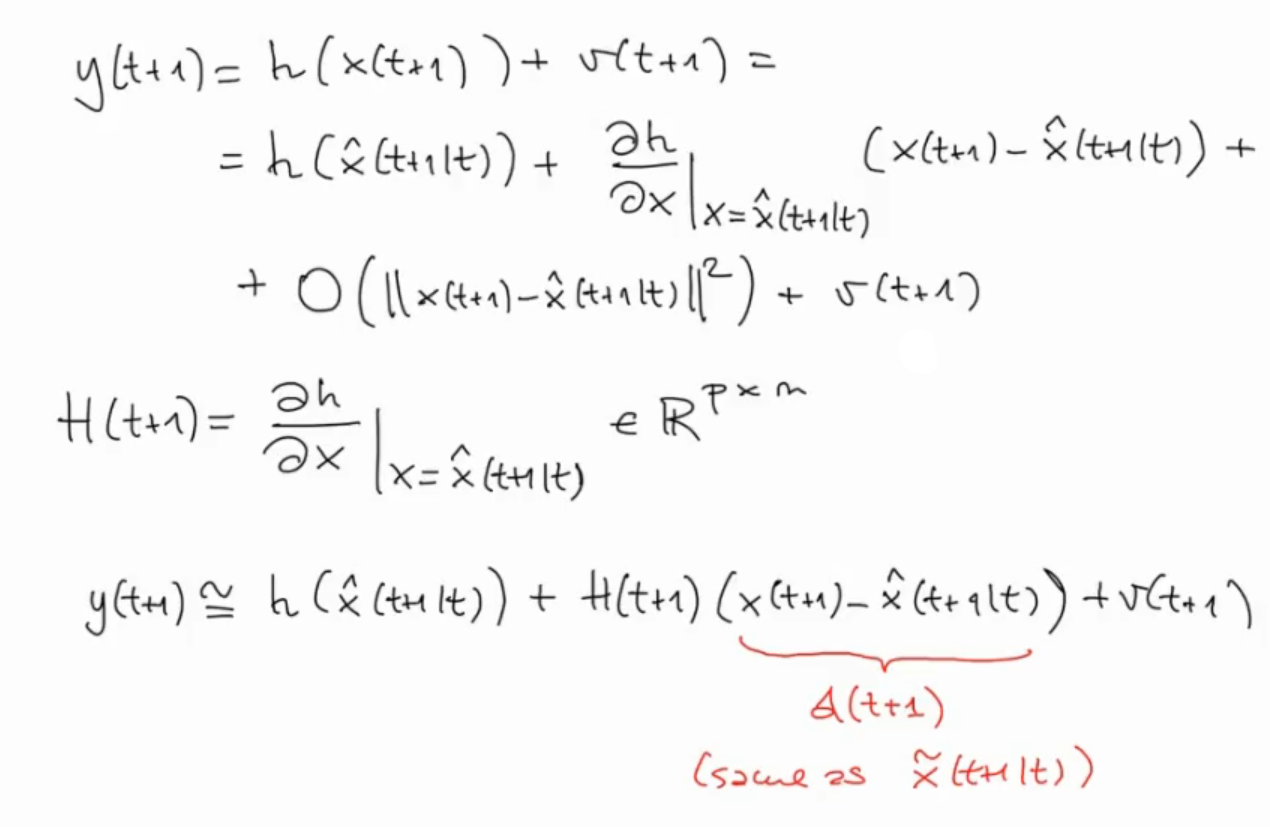
 So we have:
So we have:
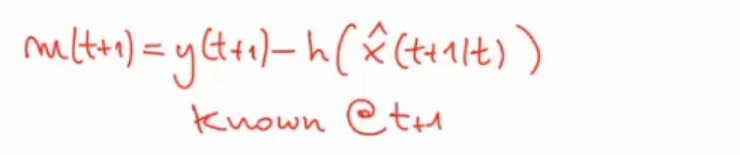
- After declaring we need to find its estimate:
- Its covariance:

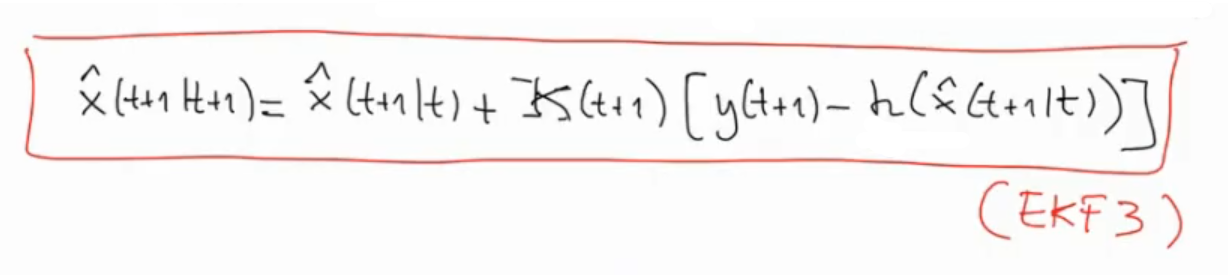
- Then we can say that, using the same formulas from the KF algorithm:

 Obtaining the 3rd formula of the EKF algorithm:
Obtaining the 3rd formula of the EKF algorithm:
- Where the Kalman Gain, , is given by:
 (4th formula of the EKF algorithm, taken from the KF algorithm)
(4th formula of the EKF algorithm, taken from the KF algorithm) - Also taken from the KF algorithm, the 5th formula of the EKF algorithm:
