-
Sensor fusion:
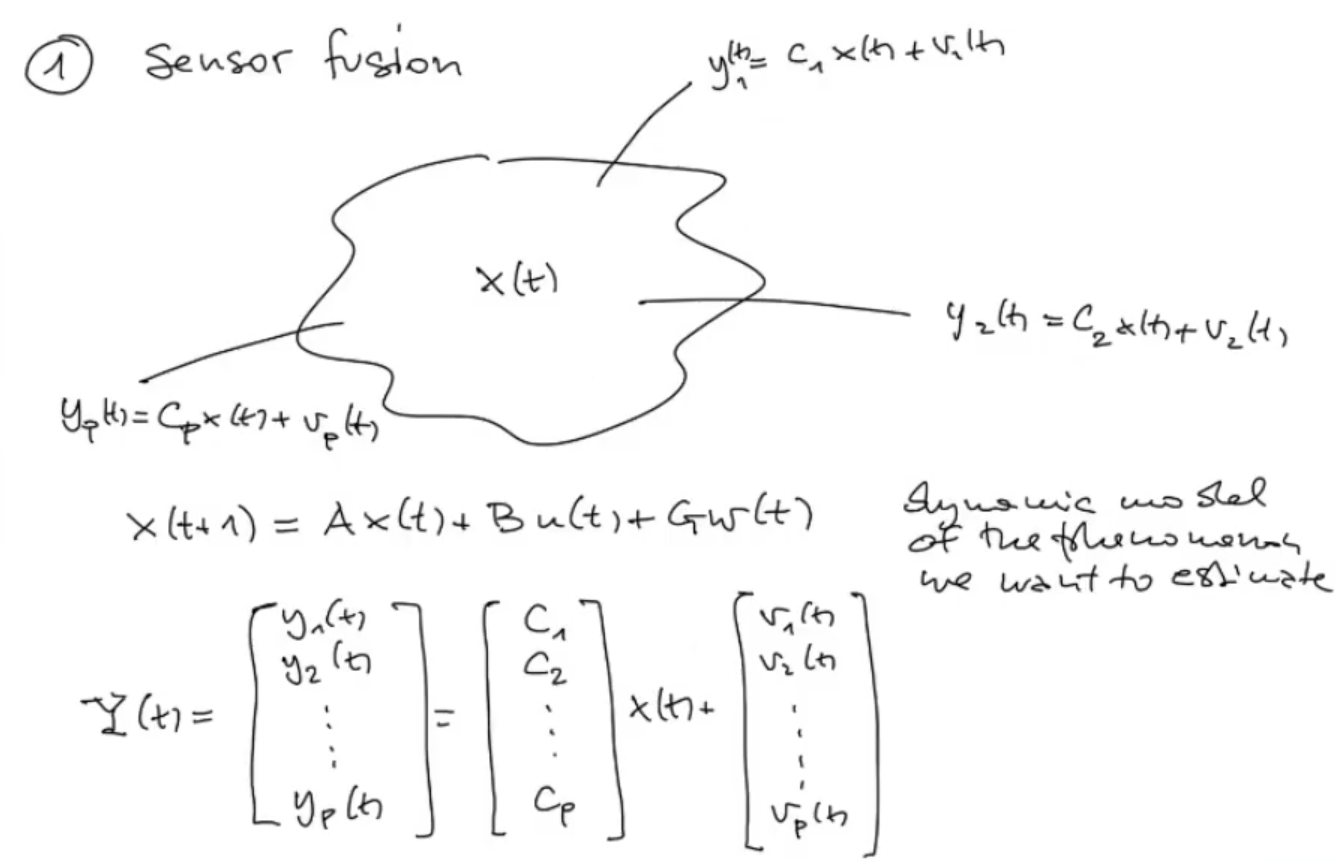 So given measurement of the same state , where each sensor has it’s own model , we can still apply the KF to find the estimate , this time with more information, so it’s better.
So given measurement of the same state , where each sensor has it’s own model , we can still apply the KF to find the estimate , this time with more information, so it’s better. -
Control
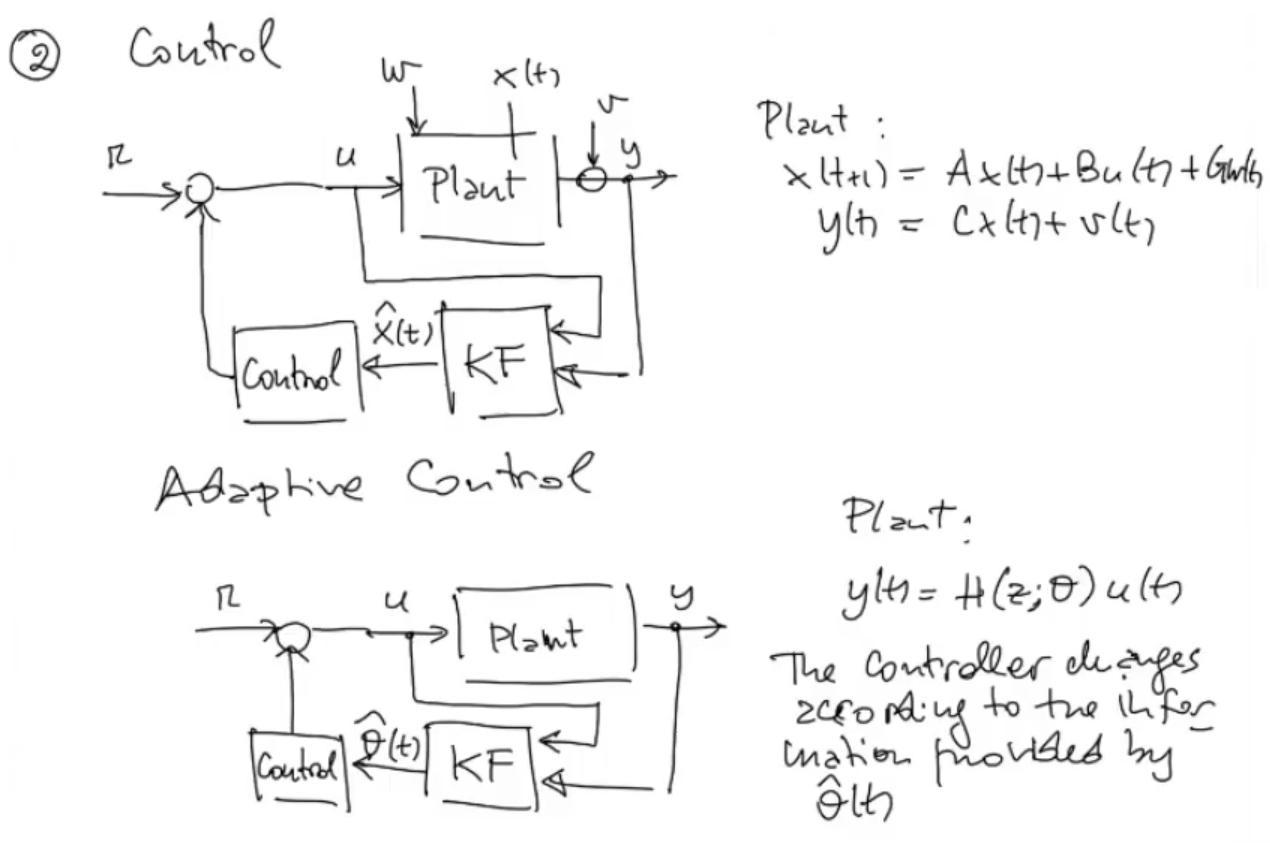 In adaptive control we can also change how the controller controls the system, this can be due to the lack of a mathematical model of the plant.
In adaptive control we can also change how the controller controls the system, this can be due to the lack of a mathematical model of the plant. -
Fault detection:
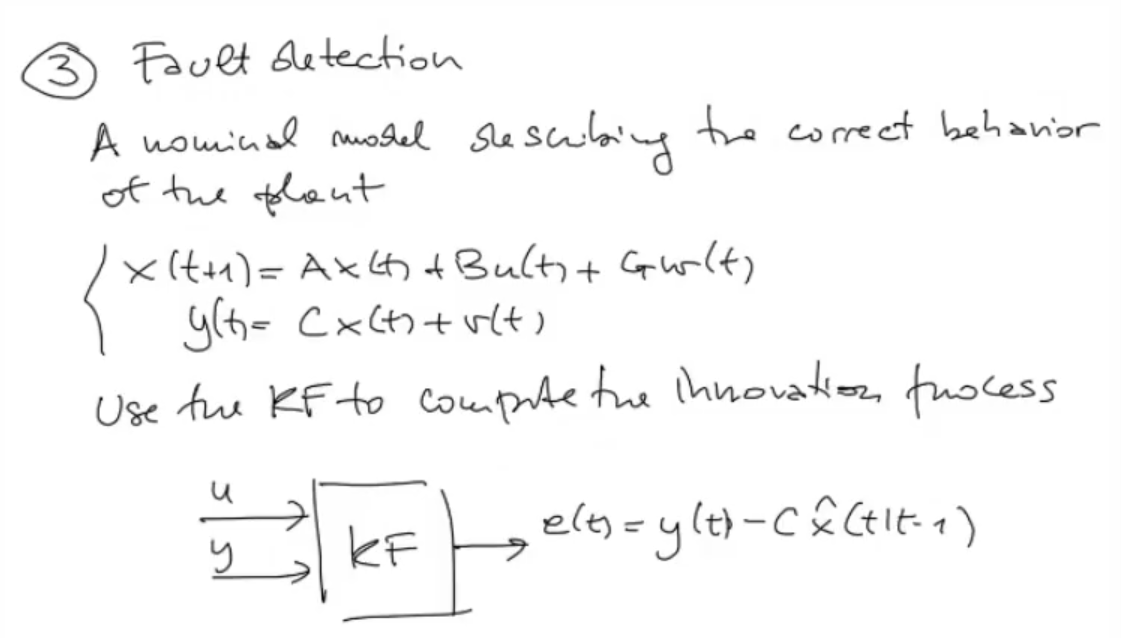
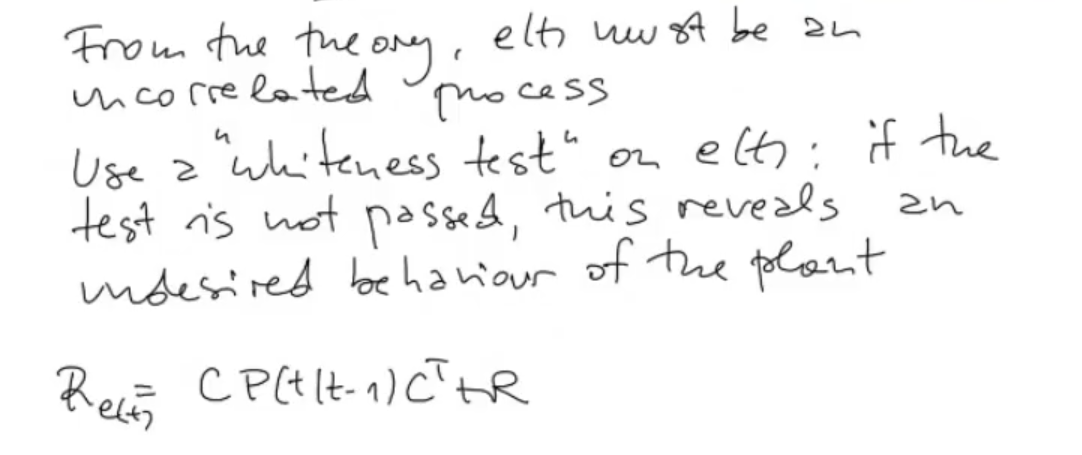
-
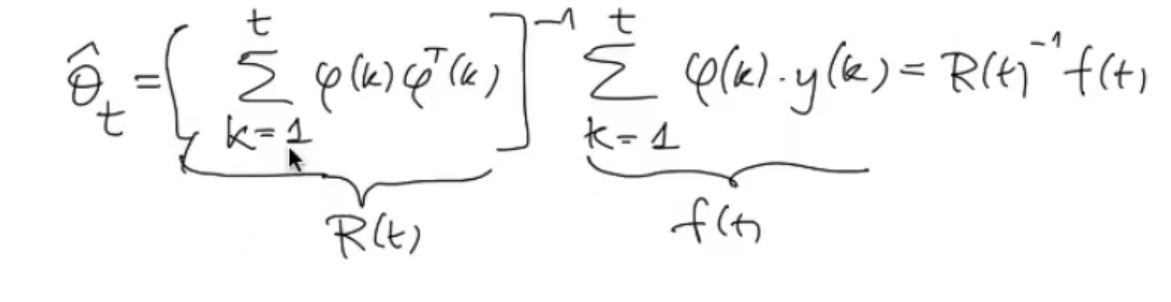
Recursive system identification:
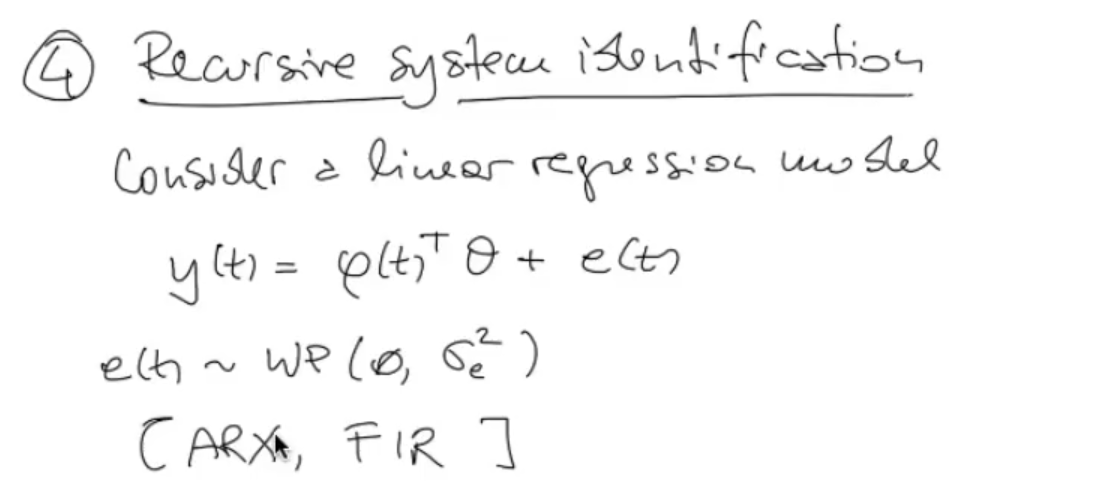
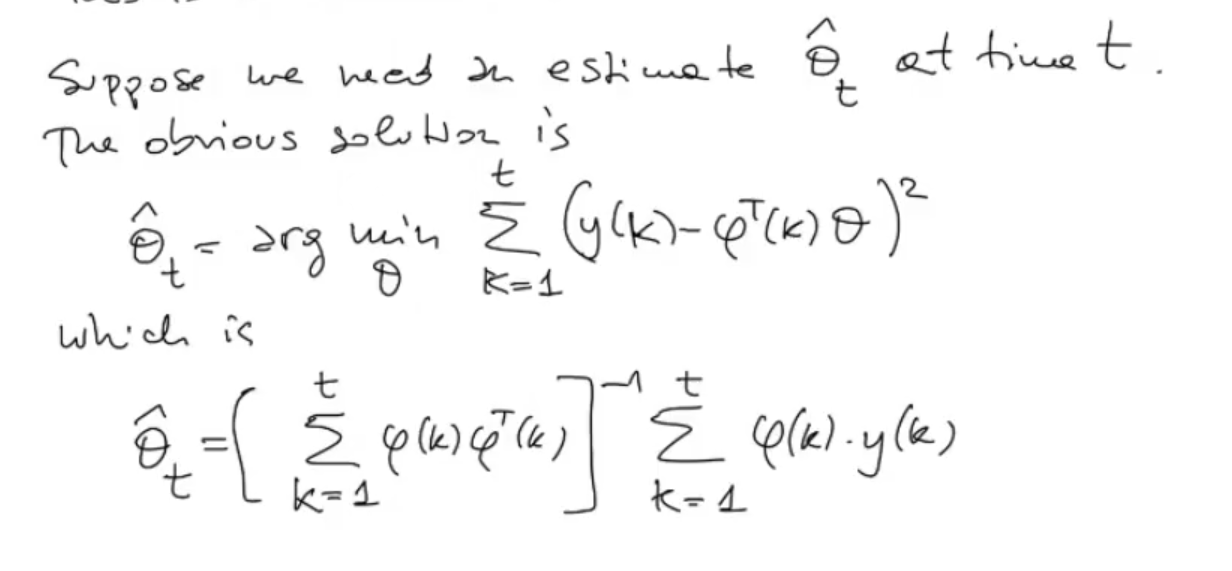
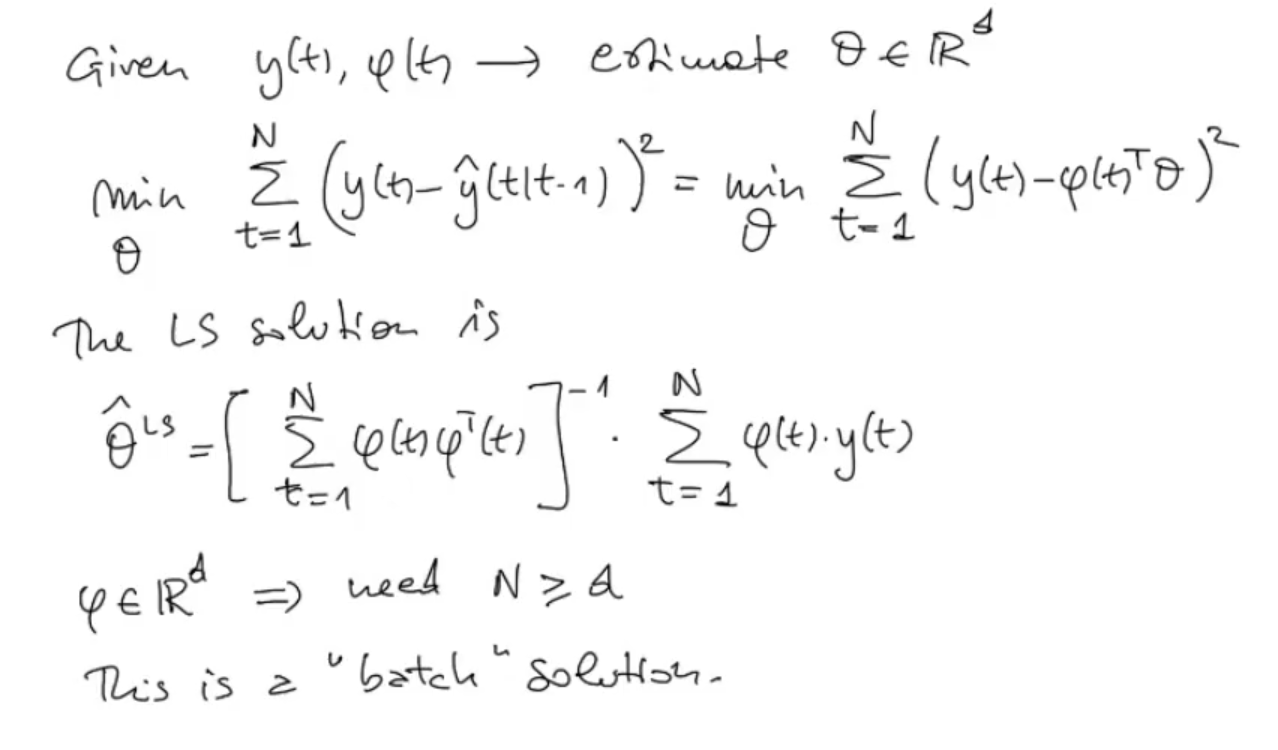 So we can only identify the system once “all” the output is given, or we can still use it at it is at each time , but is not optimized.
So we can only identify the system once “all” the output is given, or we can still use it at it is at each time , but is not optimized.
 For simplicity let’s define two function and such that:
For simplicity let’s define two function and such that:
 So:
So:
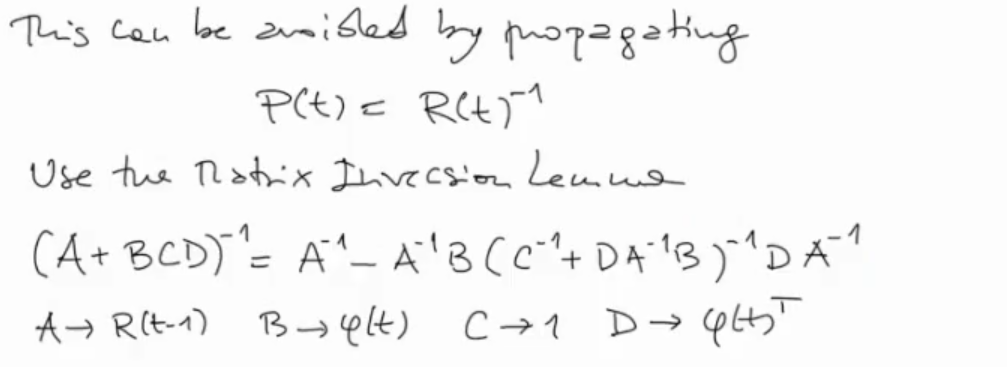
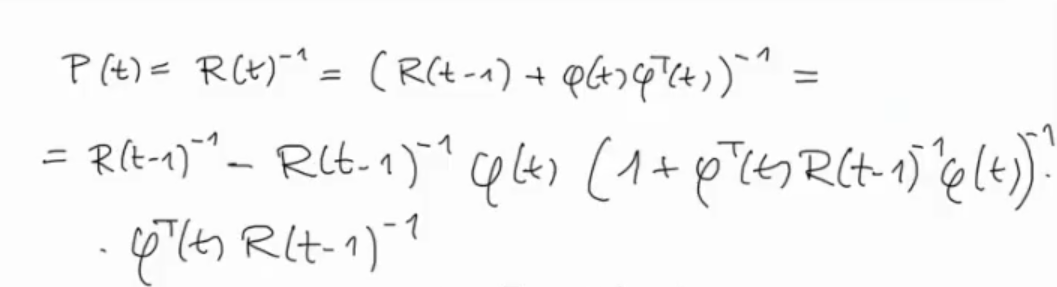
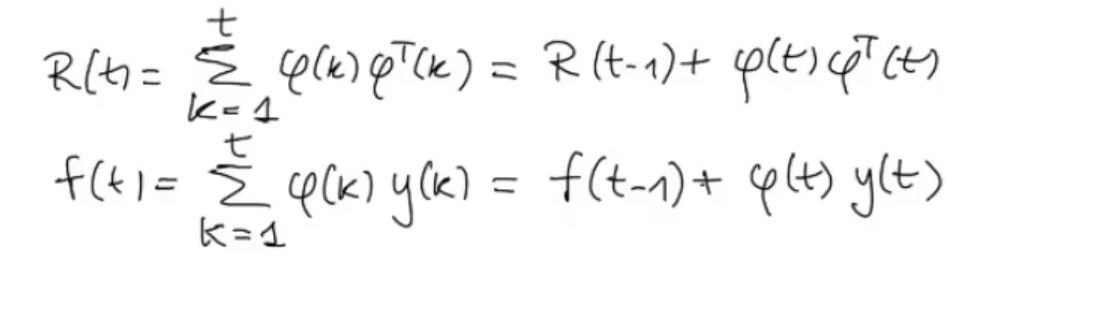 We can then write a recursive equation:
We can then write a recursive equation:

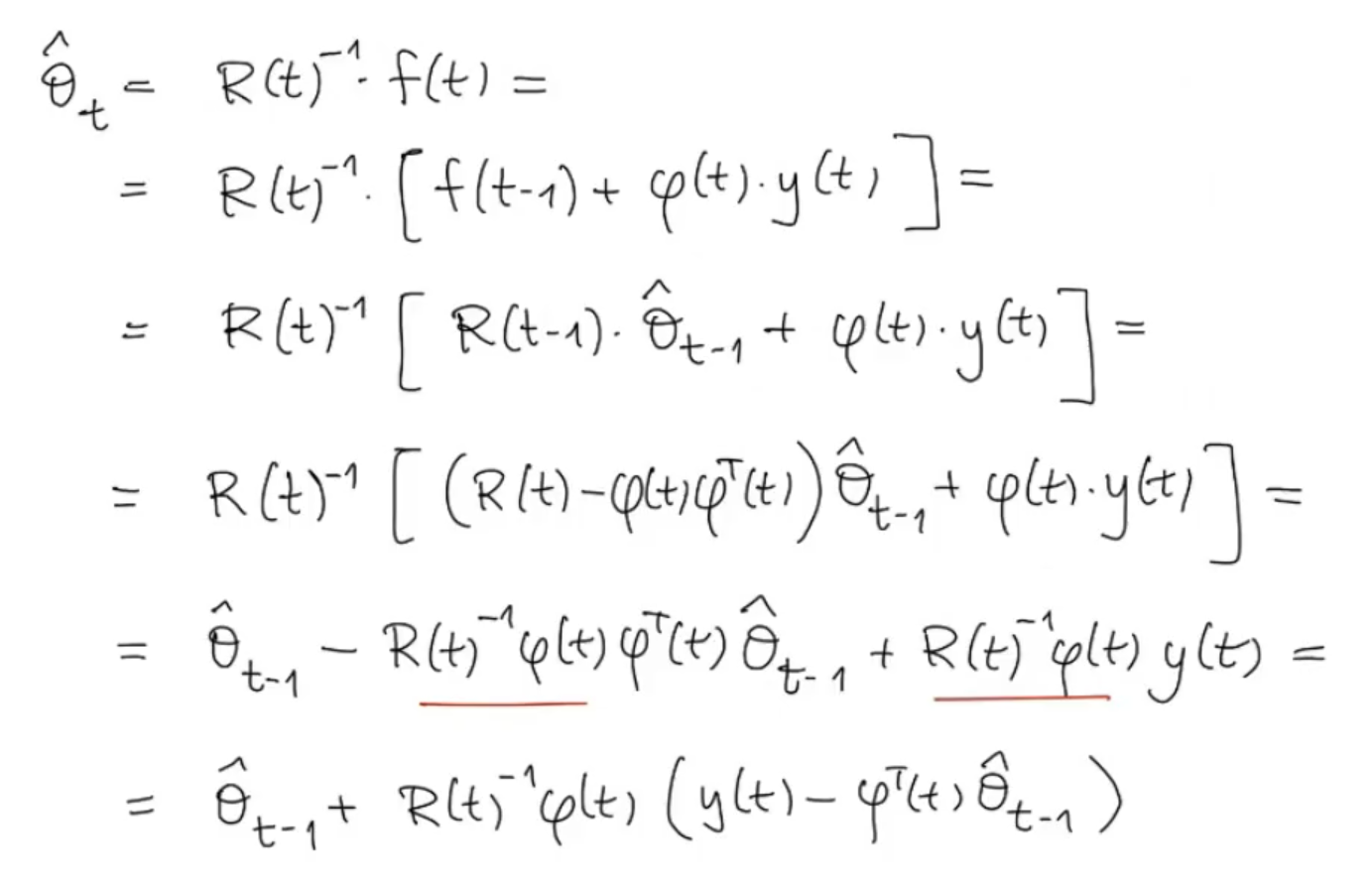 We have now obtained a recursive algorithm, to find the parameter vector :
We have now obtained a recursive algorithm, to find the parameter vector :
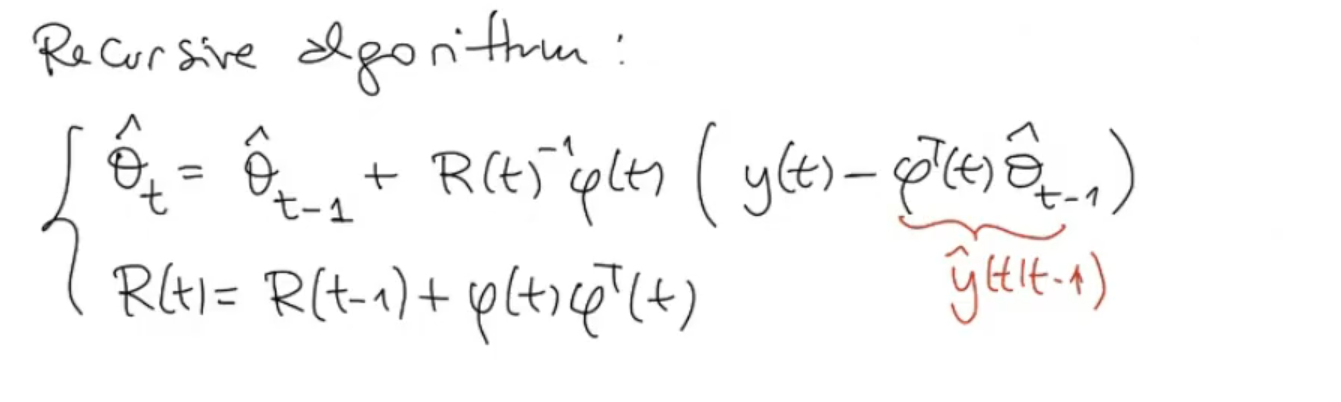 Still the algorithm could be upgraded:
Still the algorithm could be upgraded:


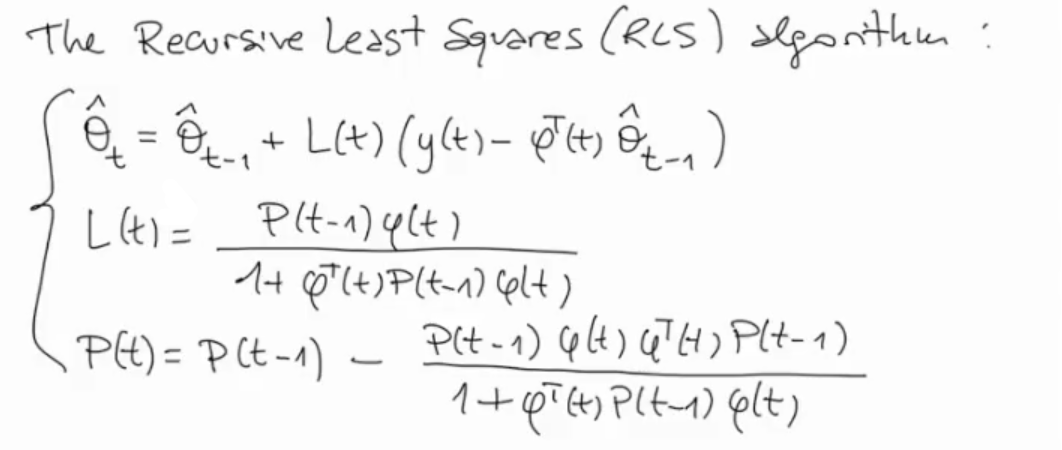
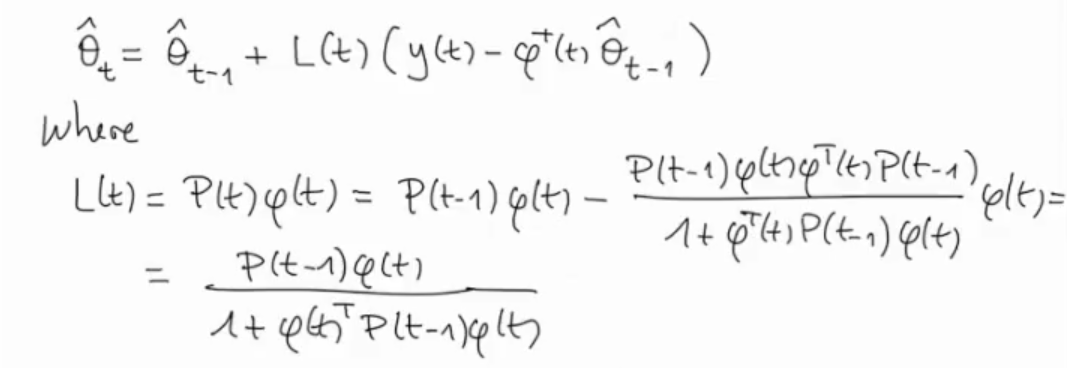 Finally we can summarize and define the RLS (Recursive Least Squares) algorithm:
Finally we can summarize and define the RLS (Recursive Least Squares) algorithm: