-
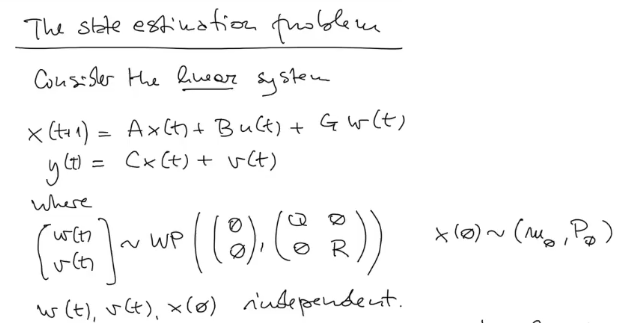
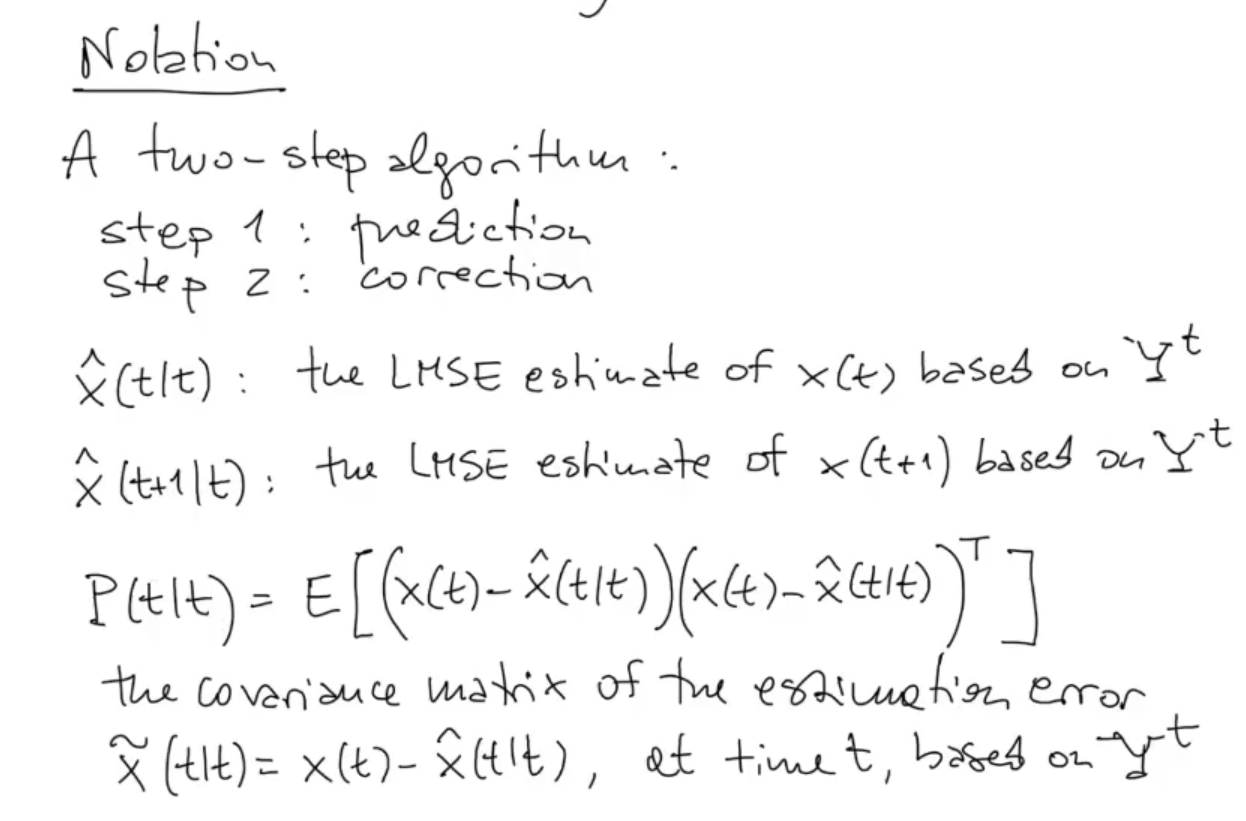
Basic Knowledge and Notation:
-
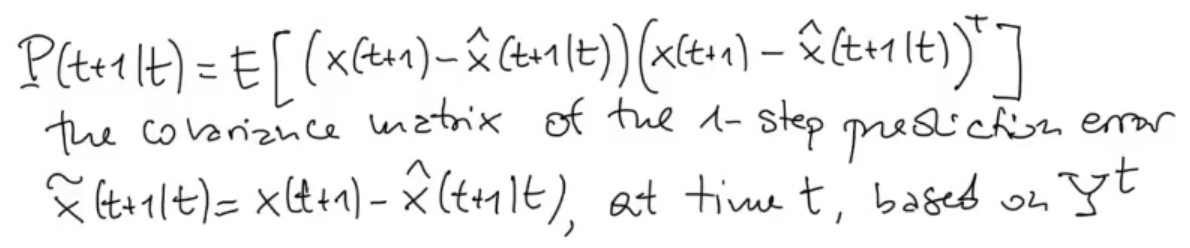
PREDICTION STEP:
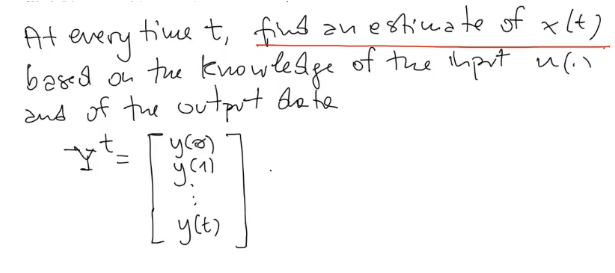
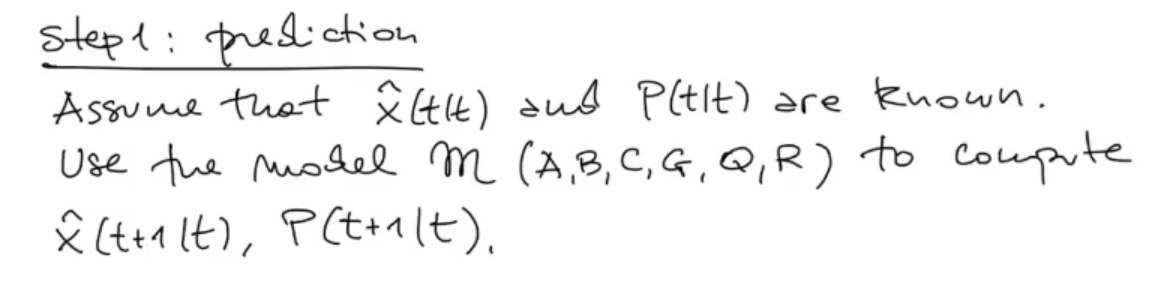 Define the problem
Define the problem
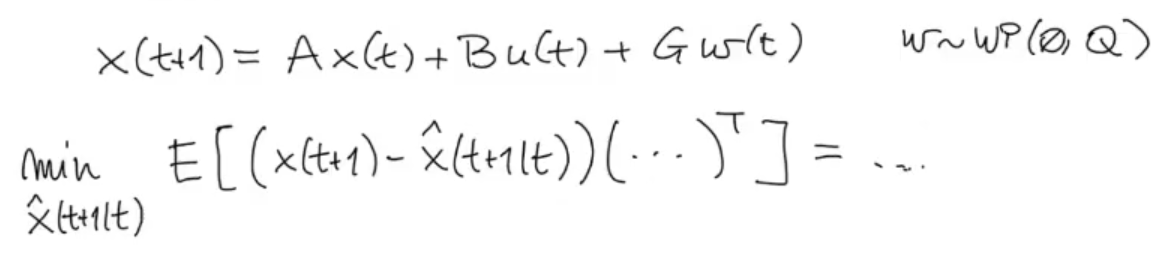 We could also write as our objective function the LMSE (Least Mean Square Error), but it will bring the exact same result.
For simplicity we will define:
We could also write as our objective function the LMSE (Least Mean Square Error), but it will bring the exact same result.
For simplicity we will define:
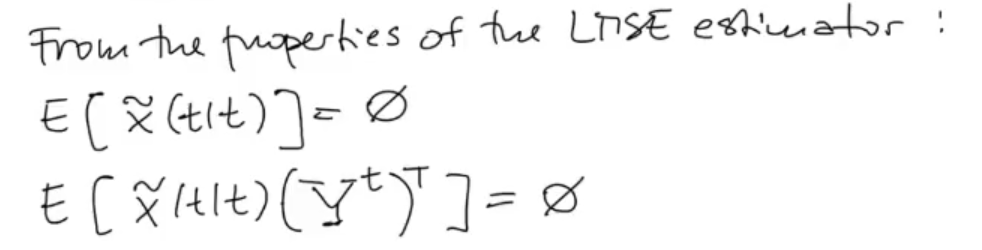
 And since we are searching for the LMSE estimator (or similar, the result will still be the LSME estimator):
And since we are searching for the LMSE estimator (or similar, the result will still be the LSME estimator):
 We substitute
We substitute
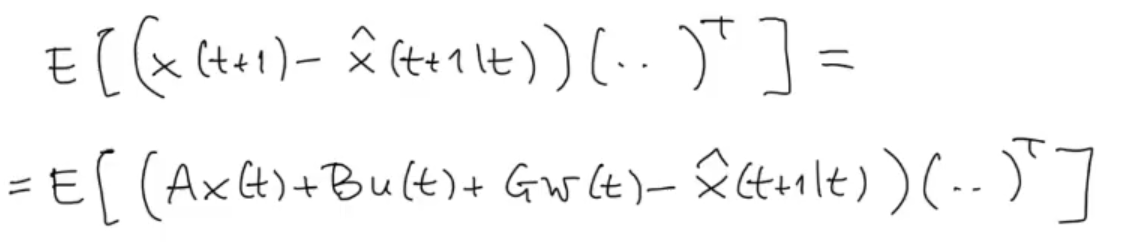 We use the previous definition of :
We use the previous definition of :
 We remove the uncorrelated part:
We remove the uncorrelated part:
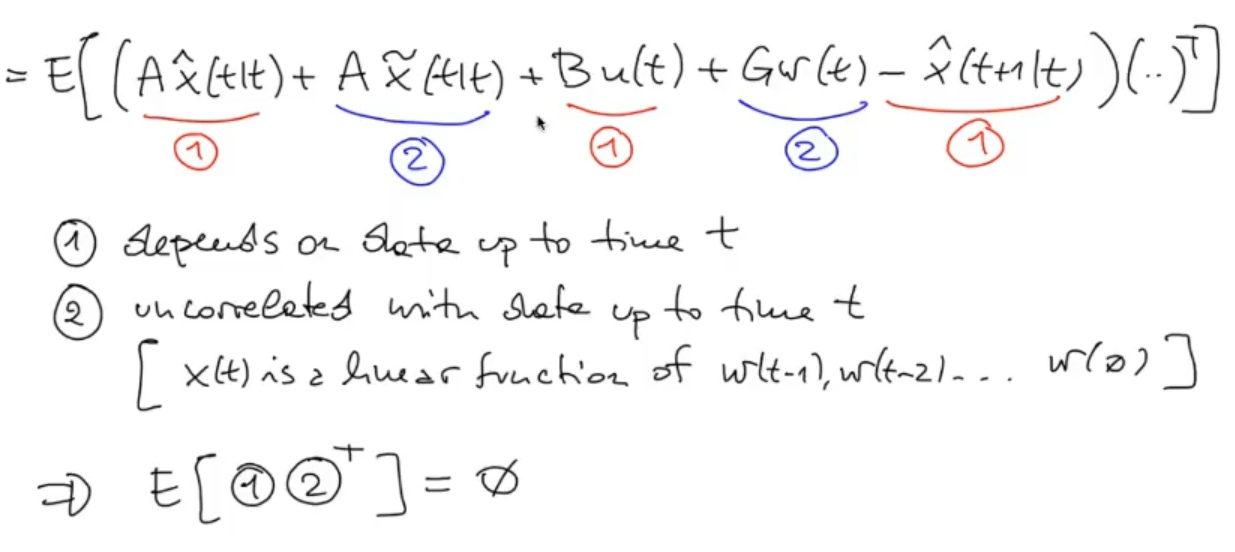 So only the products of (1)(1) and (2)(2) remains:
So only the products of (1)(1) and (2)(2) remains:
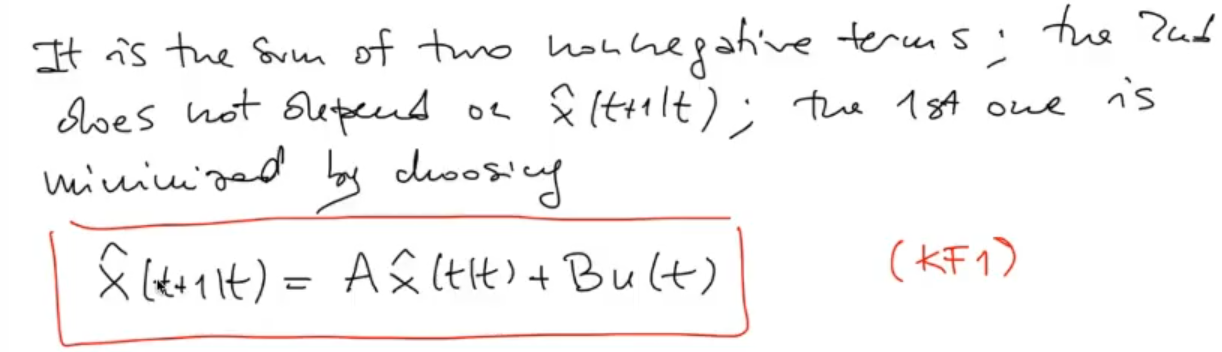
 The variance is always positive, so by choosing such that the first component is is the best possible result, after all the second component only depends on which I cannot change.
The variance is always positive, so by choosing such that the first component is is the best possible result, after all the second component only depends on which I cannot change.
 Now let’s see how changes, starting from its definition as the covariance matrix of the error on the prediction :
Now let’s see how changes, starting from its definition as the covariance matrix of the error on the prediction :
 Knowing that since is a white process:
Knowing that since is a white process:
 Then:
Then:
 We can rewrite it as we have already seen as the Discrete Lyapunov Equation:
We can rewrite it as we have already seen as the Discrete Lyapunov Equation:

-
CORRECTION STEP:
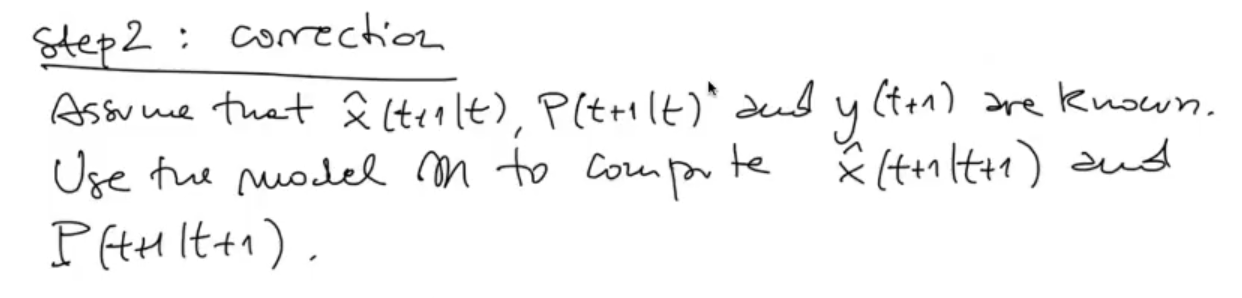 Define the problem:
Define the problem:
 Where:
Where:
- is the measurement vector obtained at time
- is the measurement vector obtained at time
We already know the solution of this problem:
 Now we need to use all the information we got:
We know that is divided in 2 parts and , so:
Now we need to use all the information we got:
We know that is divided in 2 parts and , so:
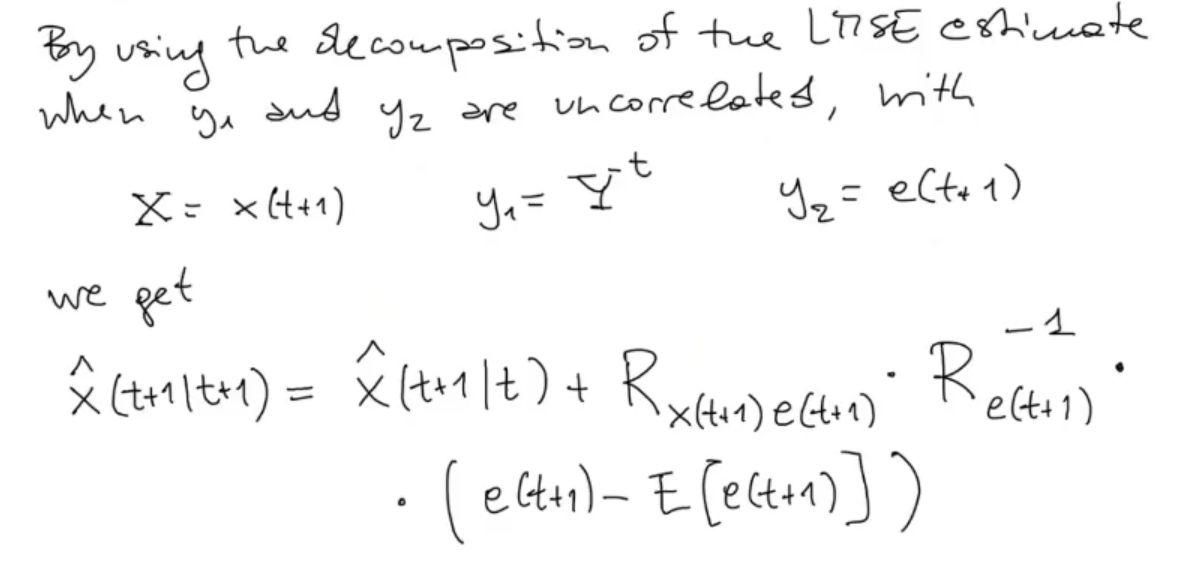
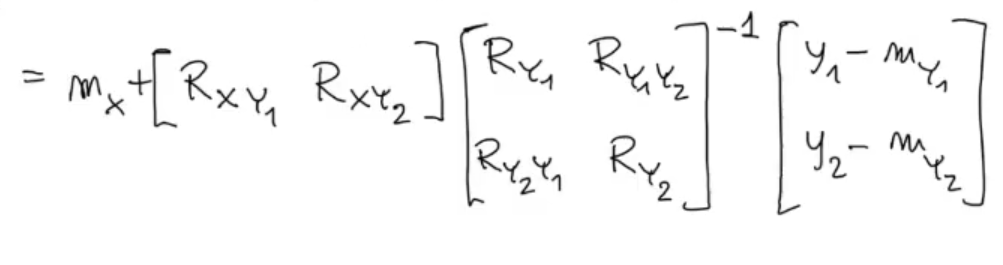 We now make a strong assumption, we say that and are uncorrelated, unfortunately in most cases this is not the case:
We now make a strong assumption, we say that and are uncorrelated, unfortunately in most cases this is not the case:
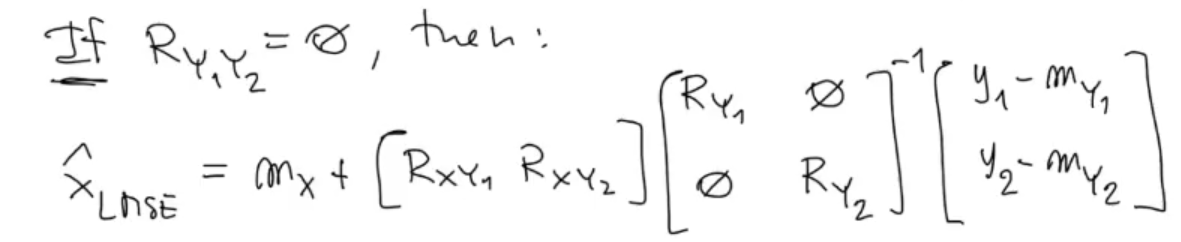 The inverse of a diagonal matrix is:
The inverse of a diagonal matrix is:
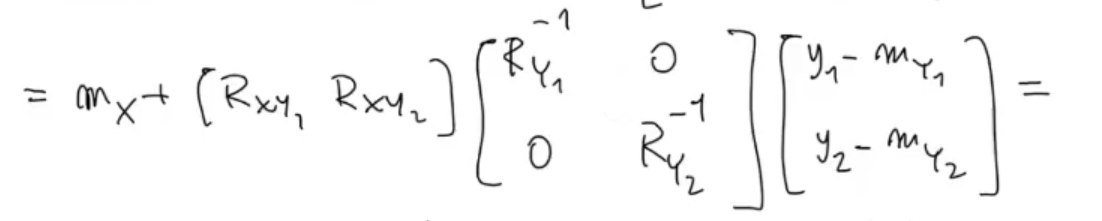 We solve the matrix product:
We solve the matrix product:
 Here we can say somenting:
Here we can say somenting:
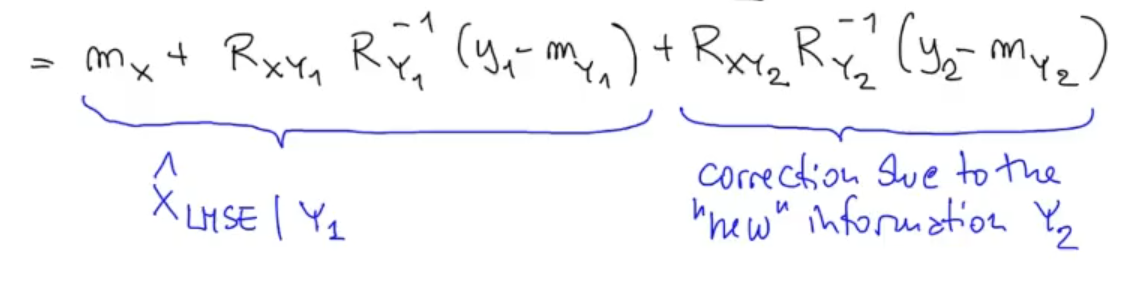 But unfortunately, this works only if and are uncorrelated:
But unfortunately, this works only if and are uncorrelated:
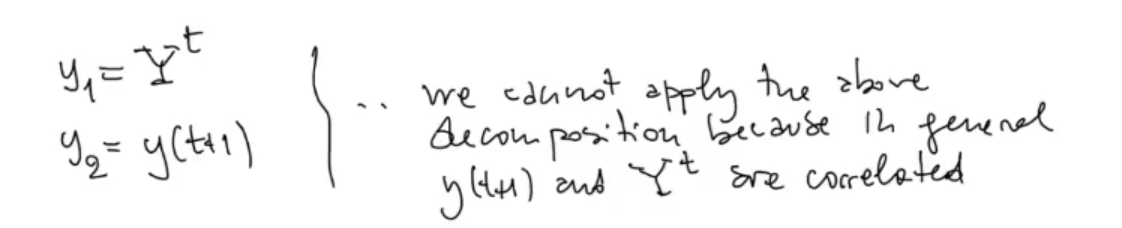
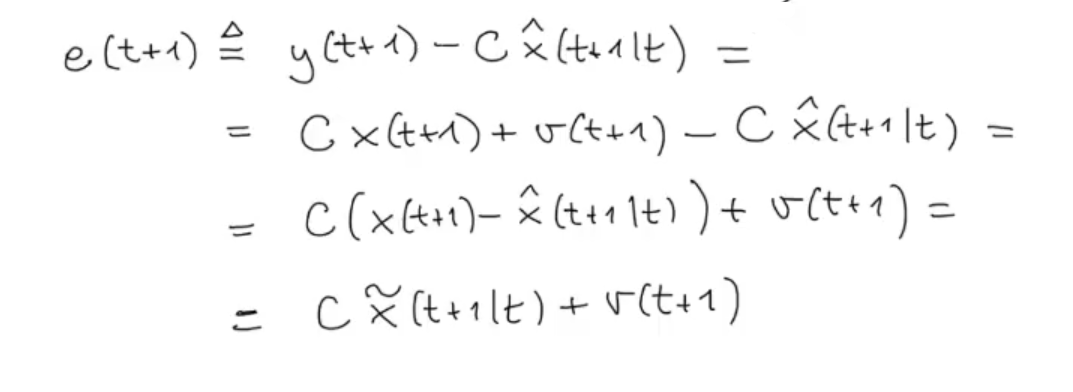
Let’s now define the so called Innovation Process:
 The idea behind it is that we want to correct using only the new information contained in , so ignore from the old information, already seen in .
The idea behind it is that we want to correct using only the new information contained in , so ignore from the old information, already seen in .
We can see the innovation process as the error of what the sensor measured (so the “almost” ground truth, whit an added noise ) and what our model predicted:
Doing some simple substitutions we have that the innovation process is equal to:
It also has some nice properties:
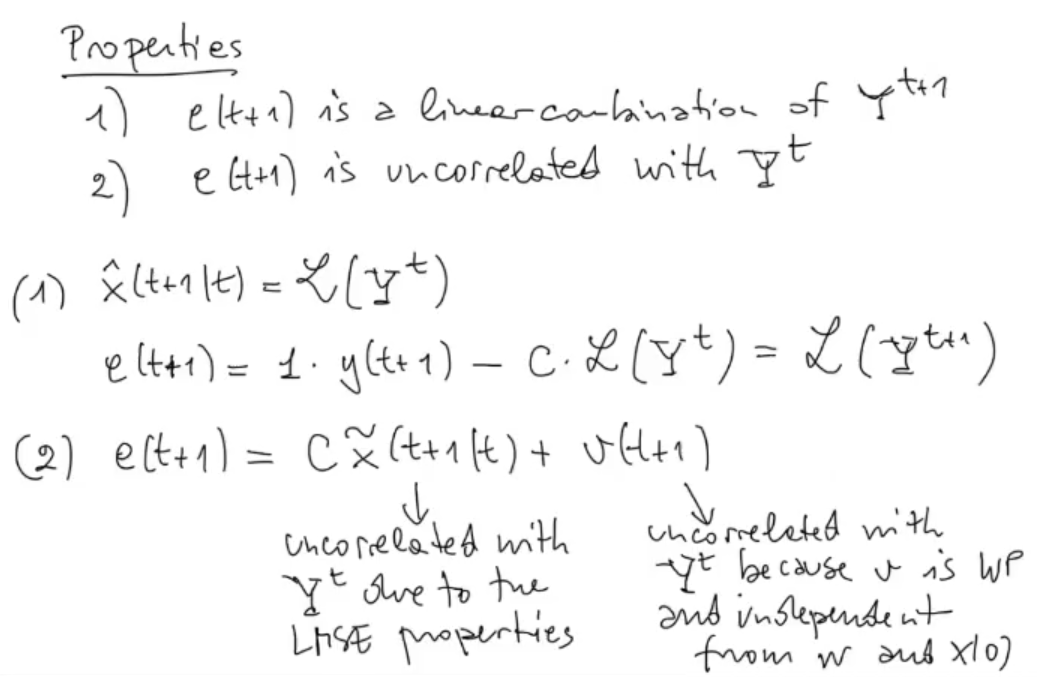 We say that is a linear combination of , because we know that the mathematical model is linear and as we can see from it is a prediction of that depends on the measurement up to time , ergo it’s a linear combination of .
We say that is a linear combination of , because we know that the mathematical model is linear and as we can see from it is a prediction of that depends on the measurement up to time , ergo it’s a linear combination of .
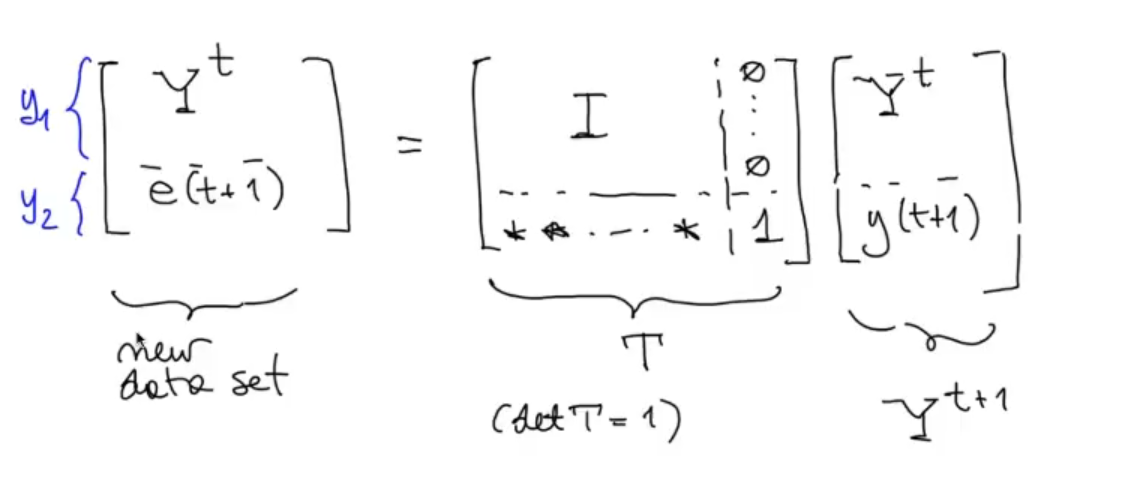
Now we can define the “update” process as:
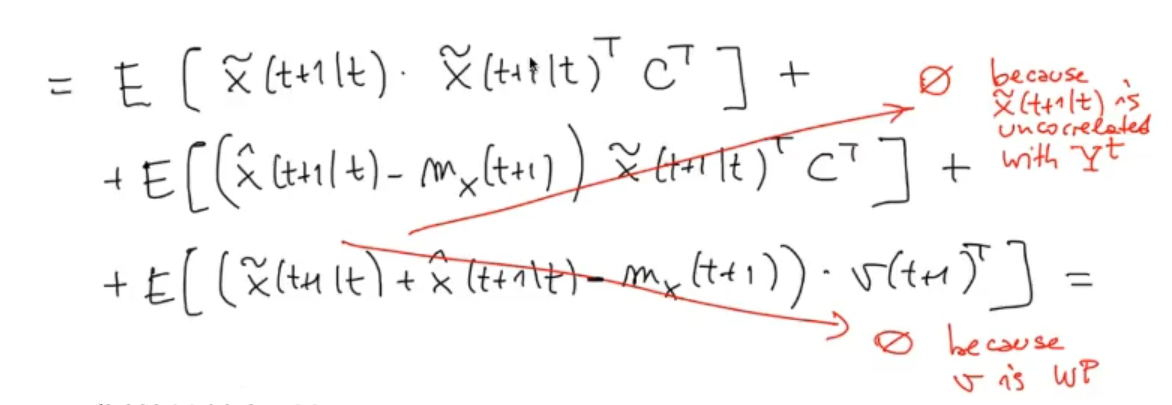
Since is uncorrelated with :
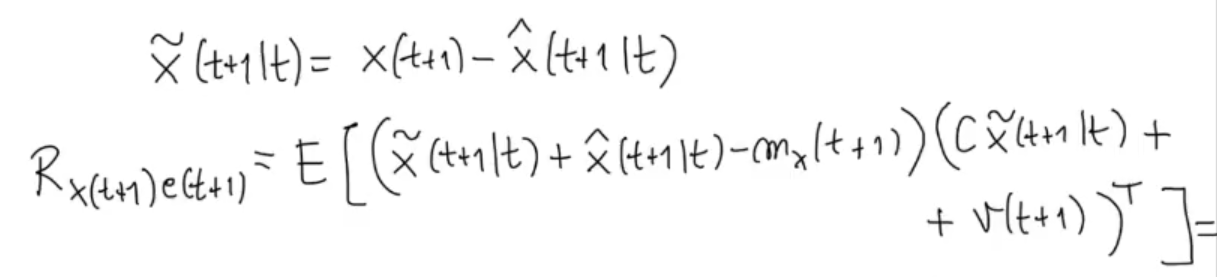
Where:
 By the definition of covariance:
By the definition of covariance:
 Like we did previously:
Like we did previously:
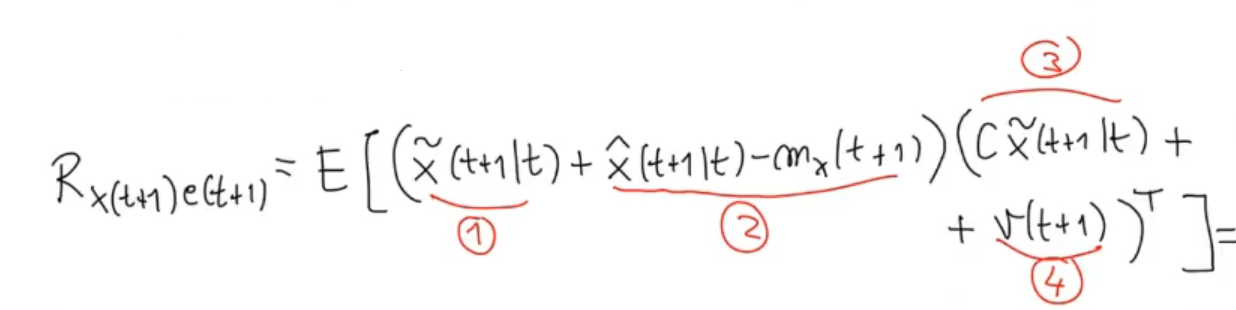
 We study how the double product interact with each other:
We study how the double product interact with each other:
 And we have that:
And we have that:
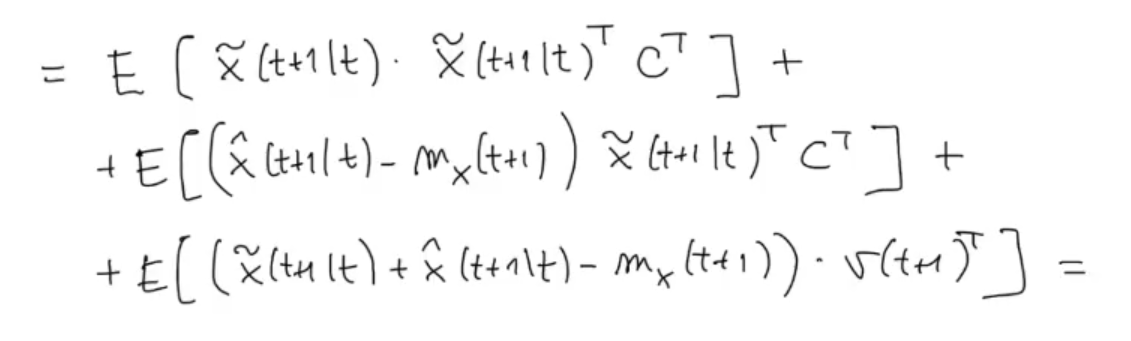 We can “delete” the last two terms:
We can “delete” the last two terms:
 And we have that is equal to:
And we have that is equal to:
We calculate also the variance of :
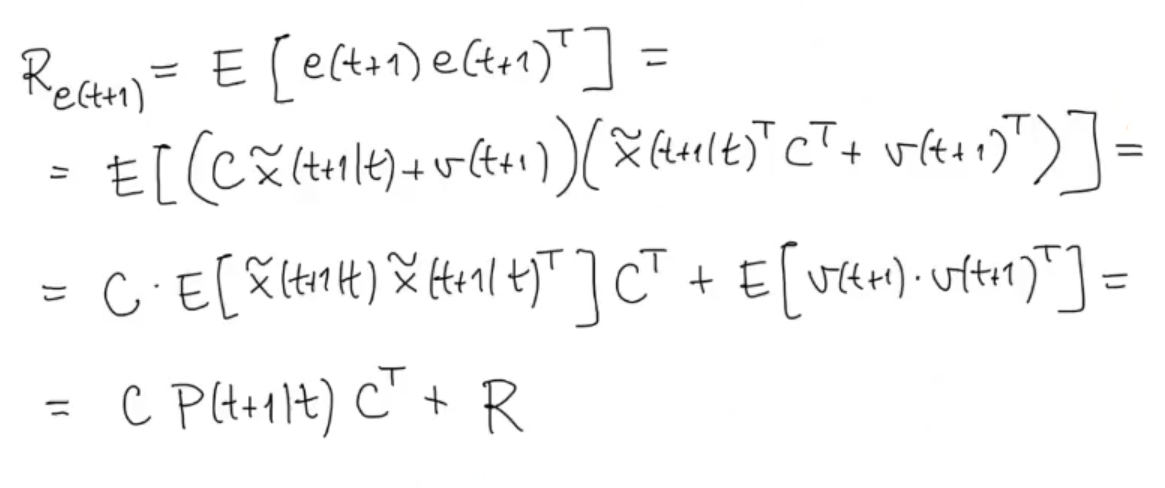 (Like before we can simplify because is a White Process)
(Like before we can simplify because is a White Process)
So we can say that
is equivalent to:
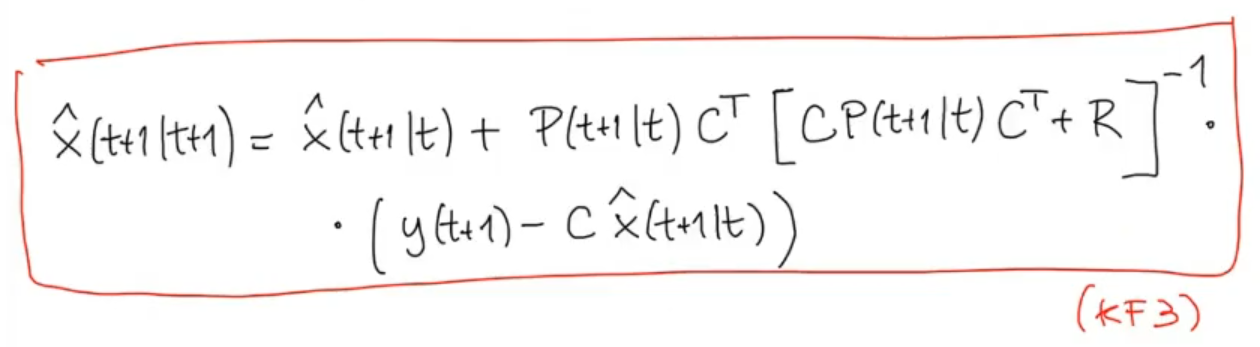
We define the Kalman Gain:

Such that:

We have seen how evolves, now let’s see how evolves, starting as always by its definition:
 We substitute the just found :
We substitute the just found :
 Then we substitute , and :
Then we substitute , and :
 Simple multiplication, and substitution for
Simple multiplication, and substitution for
 We group :
We group :
 Like before:
Like before:
- The covariance of something (different from ) multiplied by is zero since is a White Process.
- The variance of is , as defined in the formulation of the problem.
- The covariance of is , from the definition of
- Also note that , and are not stochastic.

We can simplify the formula, first we develop the matrix multiplication:
 Then we simplify:
Then we simplify:
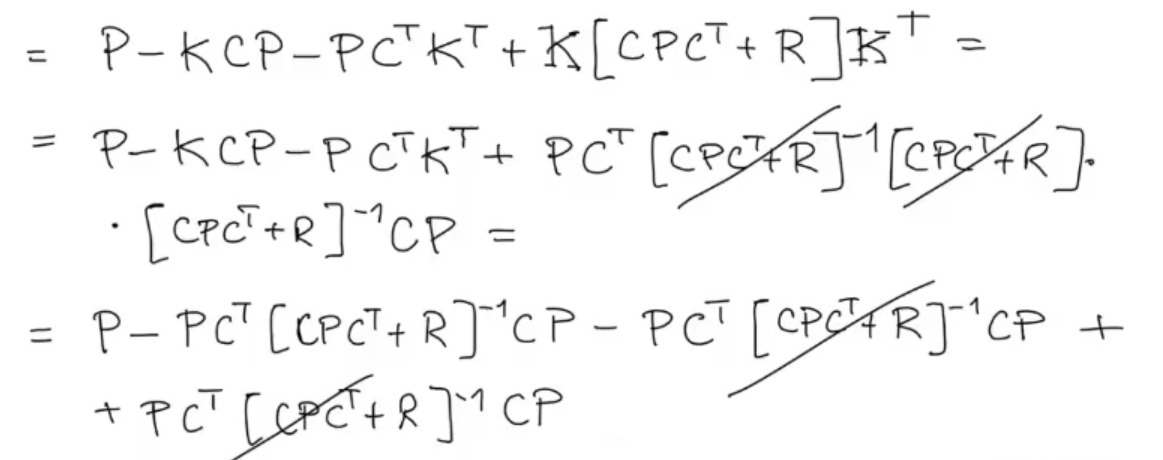
Finally we obtain the last formula for the KF algorithm:
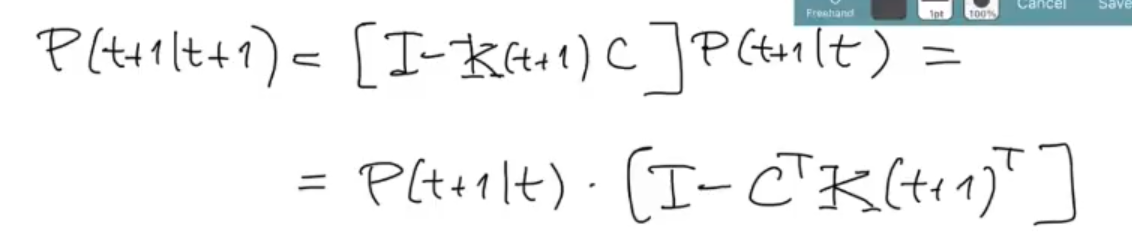
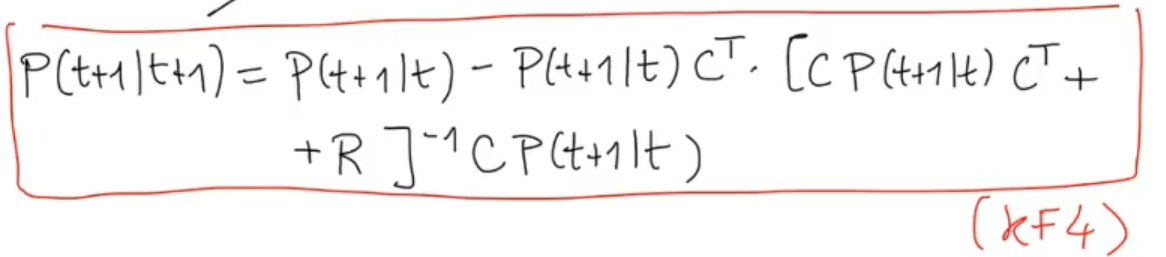 Can also be written as:
Can also be written as:
 3. Iterate
3. Iterate