Explanation of the Algorithm
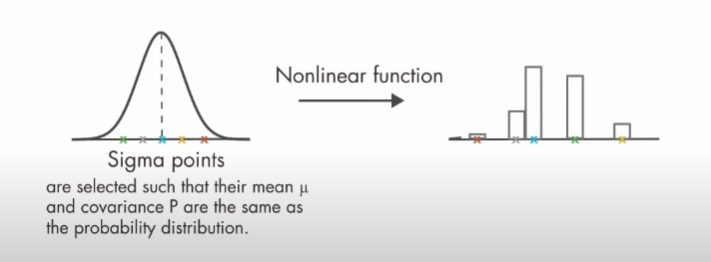
- Find the sigma points
- Calculate the approximate Gaussian distribution of the state estimate using the non-linear function of the system and the sigma points, this approximation will replace the covariance matrix.
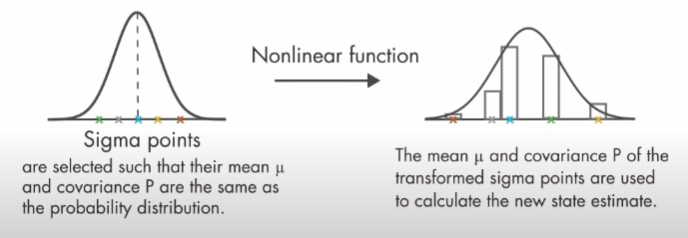
- The newly calculated Gaussian pdf is then used to calculate the new estimate at .
- The estimate at is corrected using the measurements at .
Algorithm
-
Initialization:
-
Calculate the mean and covariance matrix
- Calculate the sigma points :
- Transform the sigma points using the non-linear state-update function :
Where:
- are the sigma point of .
- Approximate the pdf of the points:
- Transform the sigma points using the non-linear measurement function :
Where:
- are the sigma point of .
- Approximate the pdf of the points:
Where:
- measured data.
- Iterate repeating form point (2.)