 So we can say that:
So we can say that:
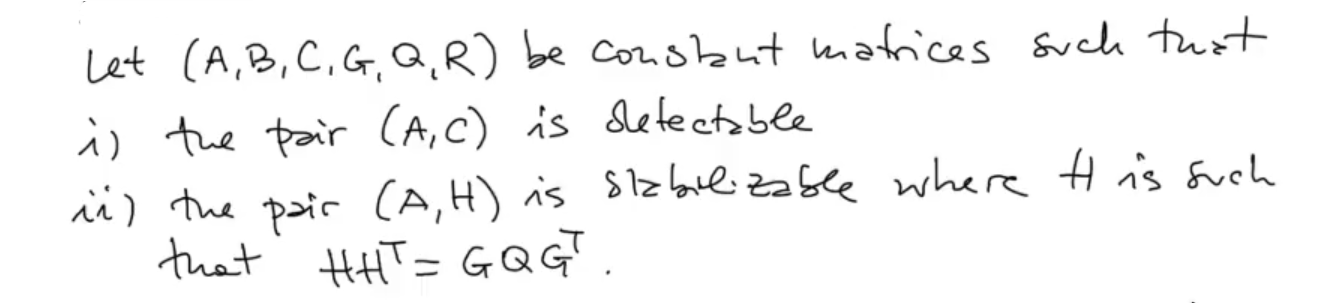
NOTE: The condition can be relaxed and just technical, it grantees that there is a unique solution to the ARE (Algebraic Riccati Equation), you want to avoid non-reachable eigenvalues values on the unit circumference. While the condition is unavoidable, and it says that the non-observable eigenvalues have to be stable , if you cannot measure something it has to go to zero.
-
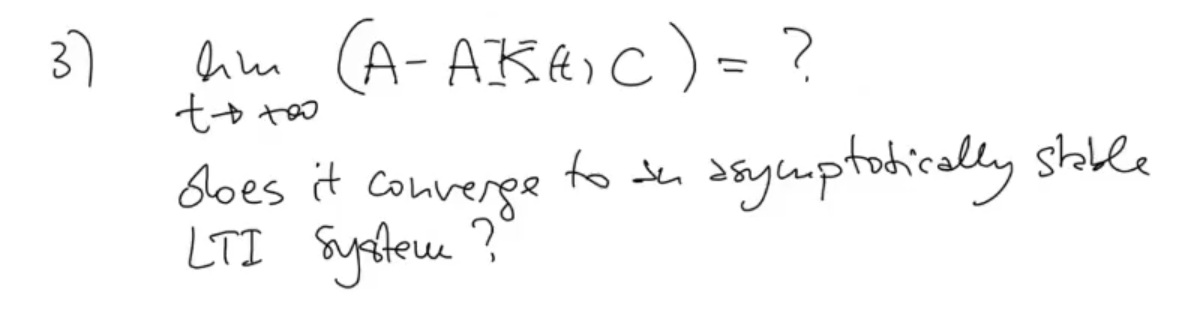
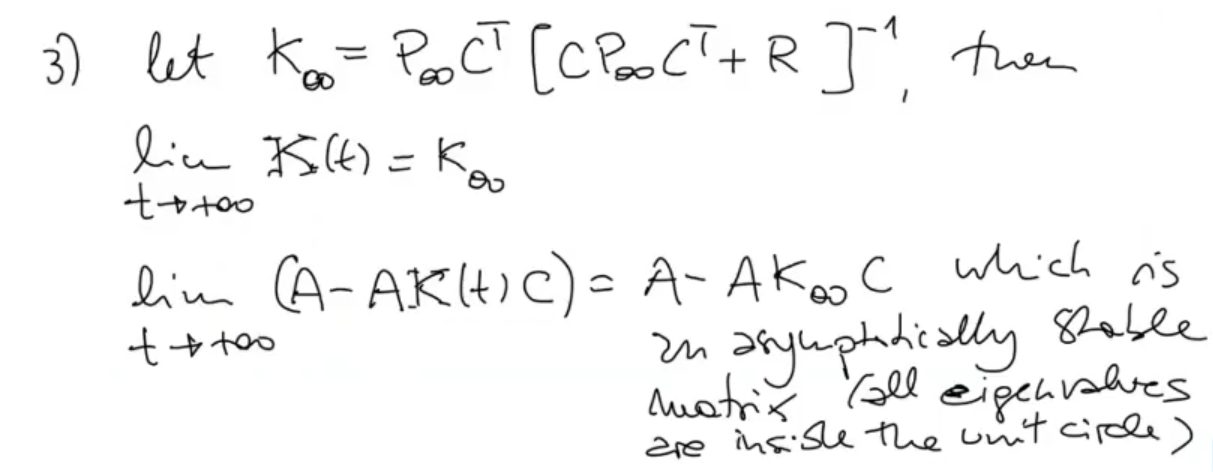
of the error :
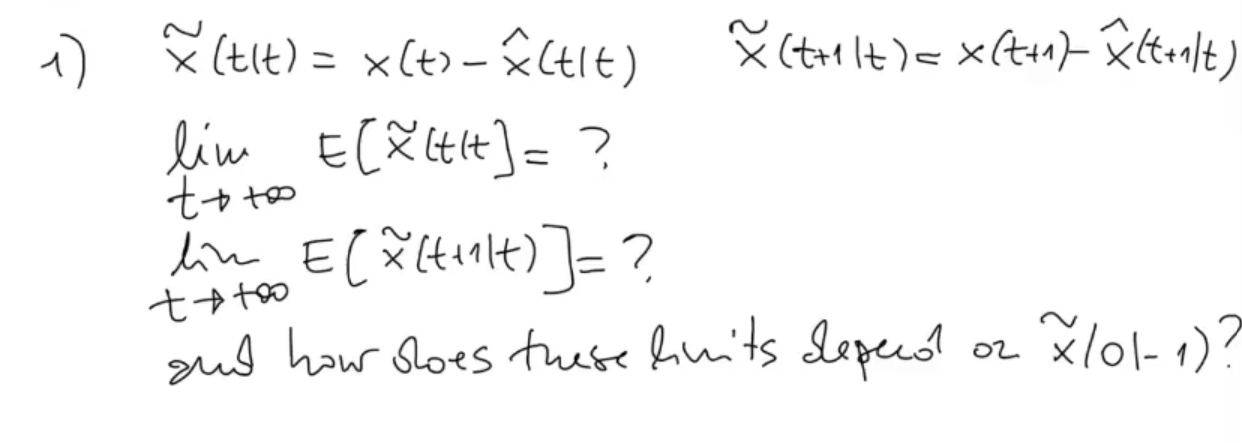 Both limits go to , no matter the initial value :
Both limits go to , no matter the initial value :

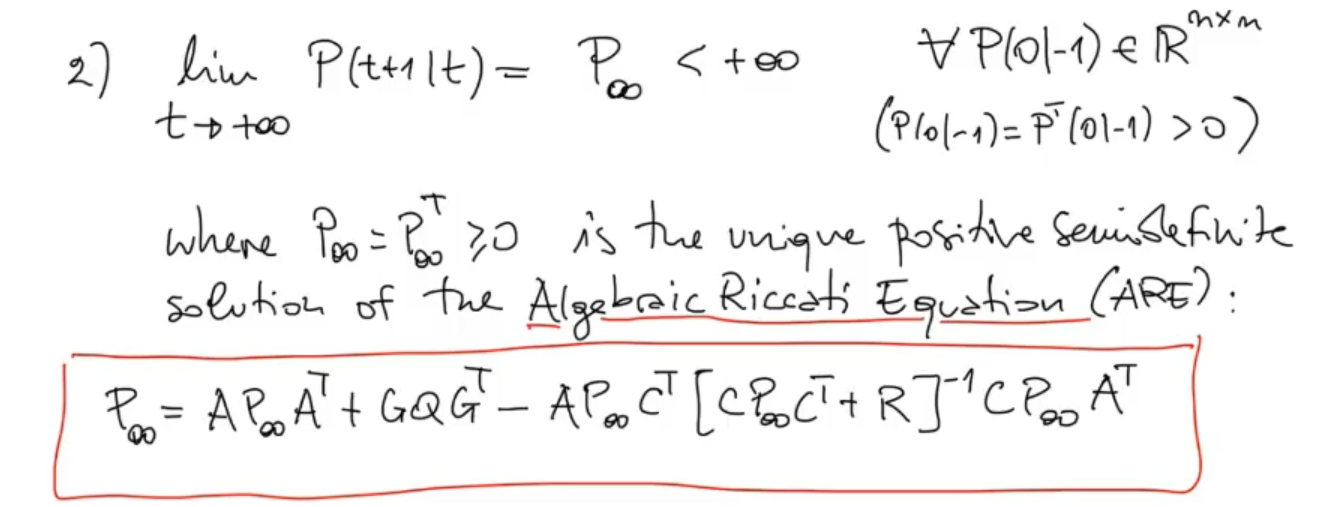
Solution of the ARE (Algebraic Riccati Equation), in a specific linear case:
Why this is true, will be shown later.
-
Where, was defined in the “KF as a dynamic system”:
 Taking the results from the previous point (2.) of
Taking the results from the previous point (2.) of
-
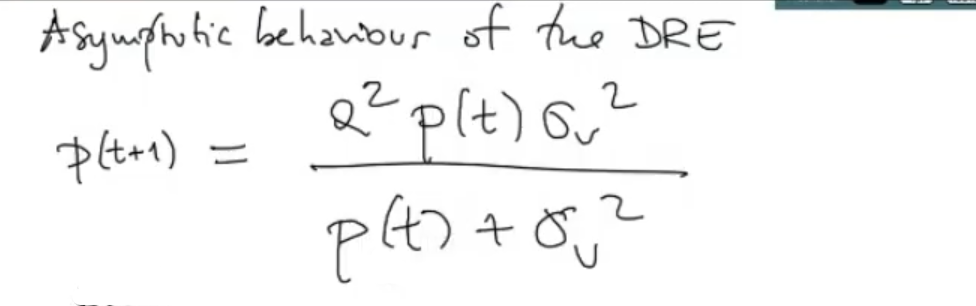
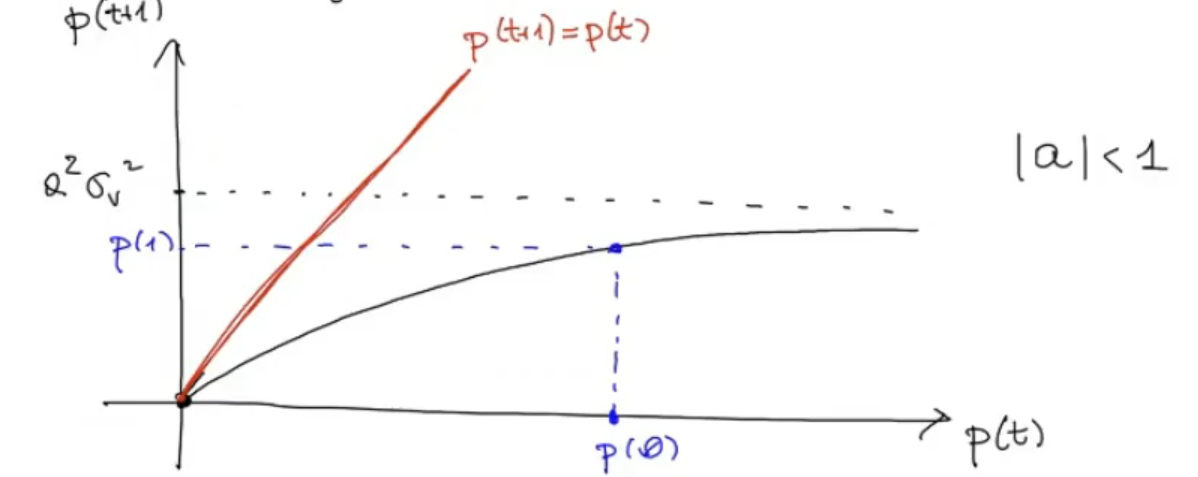
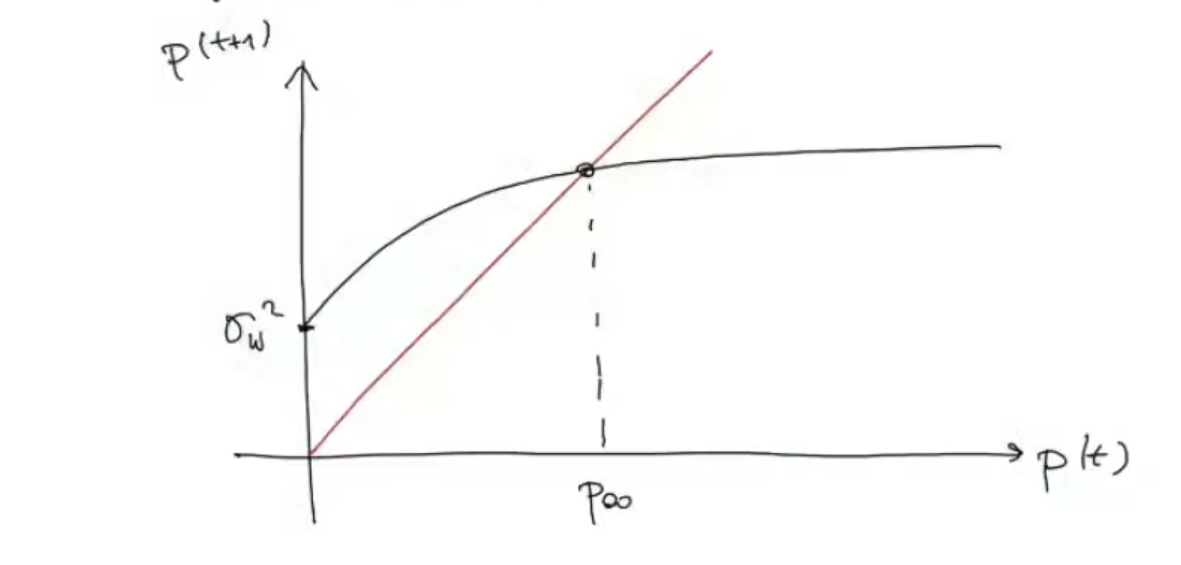
Let’s take a simple version of the DRE (Discrete Riccati Equation):
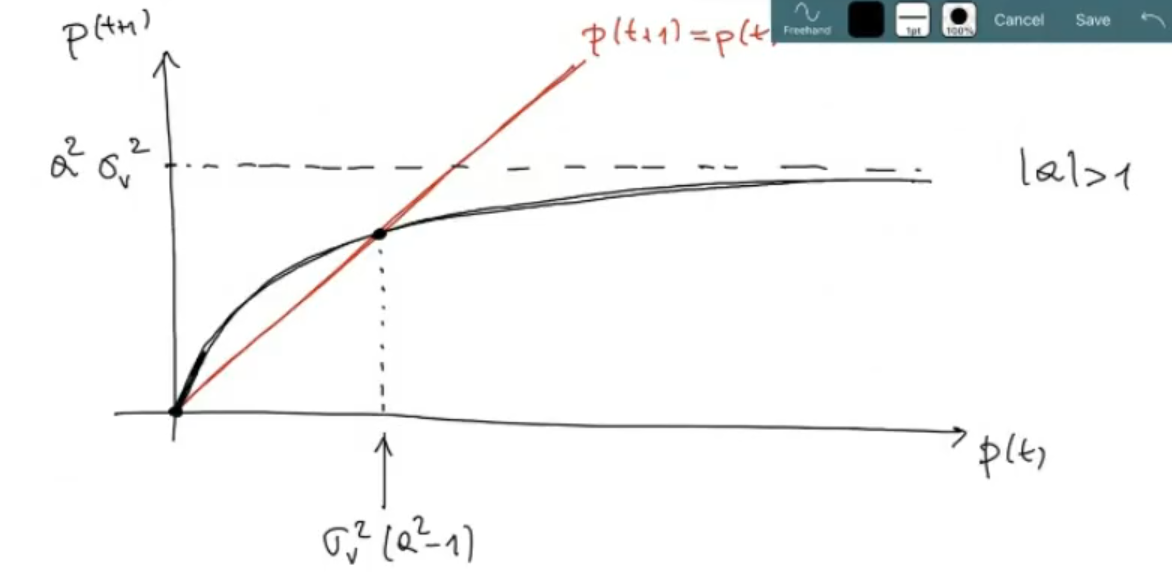
 We study the curve:
We study the curve:
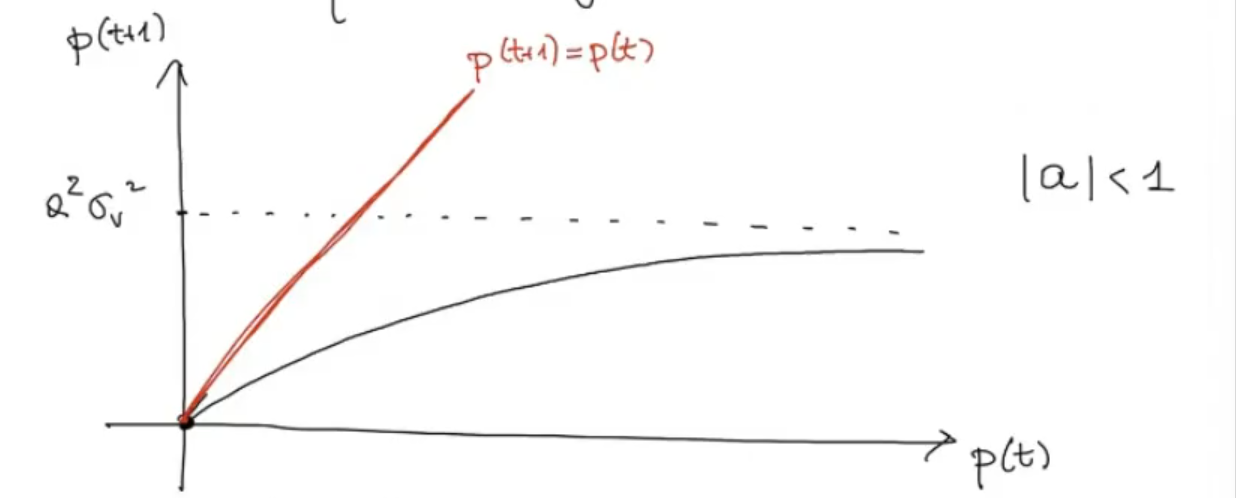
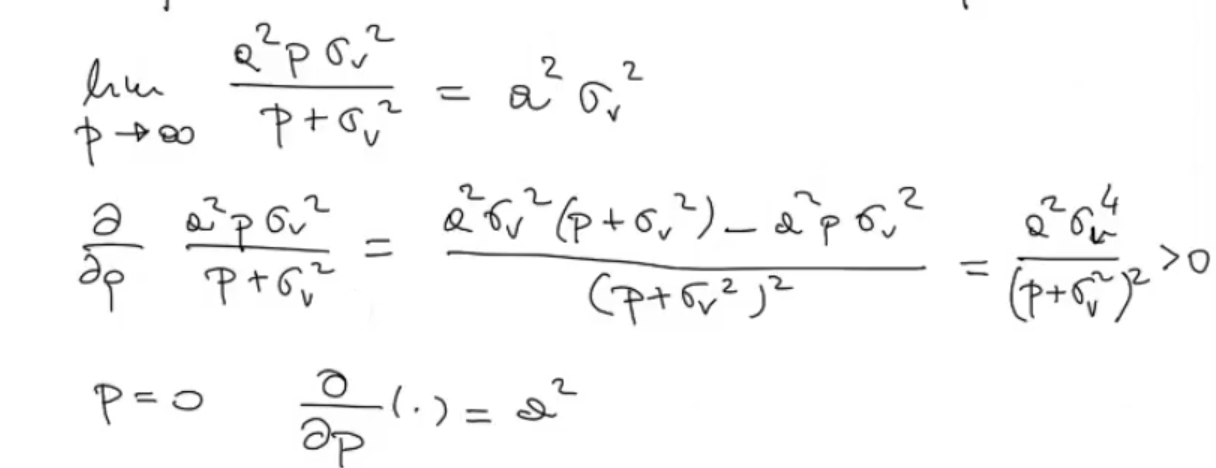 So we obtain something like this:
So we obtain something like this:
 Let’s take a random :
Let’s take a random :
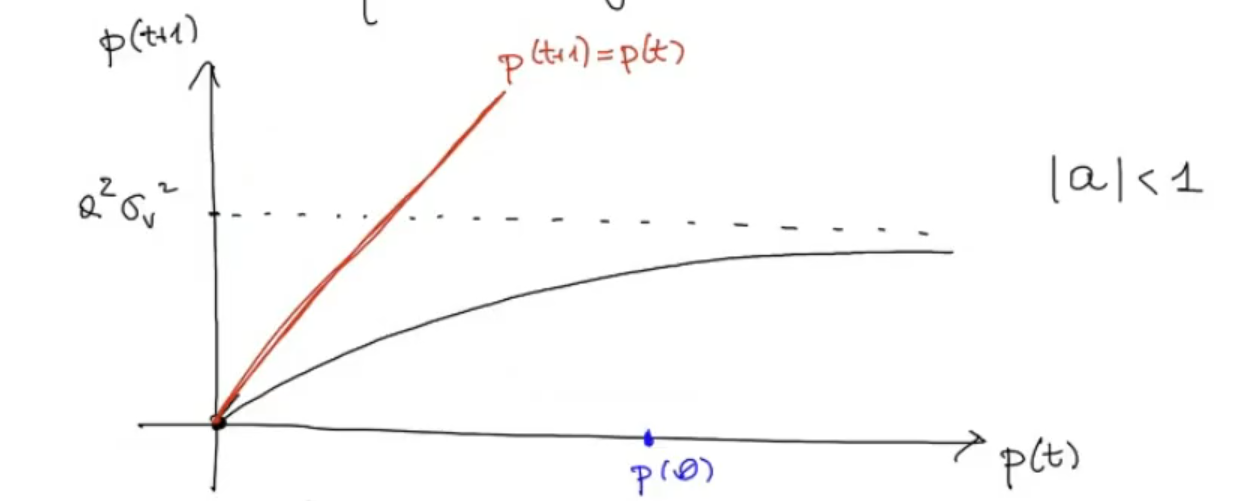 To compute we simply do:
To compute we simply do:
 So we take project on the axis, using the line and calculate :
So we take project on the axis, using the line and calculate :
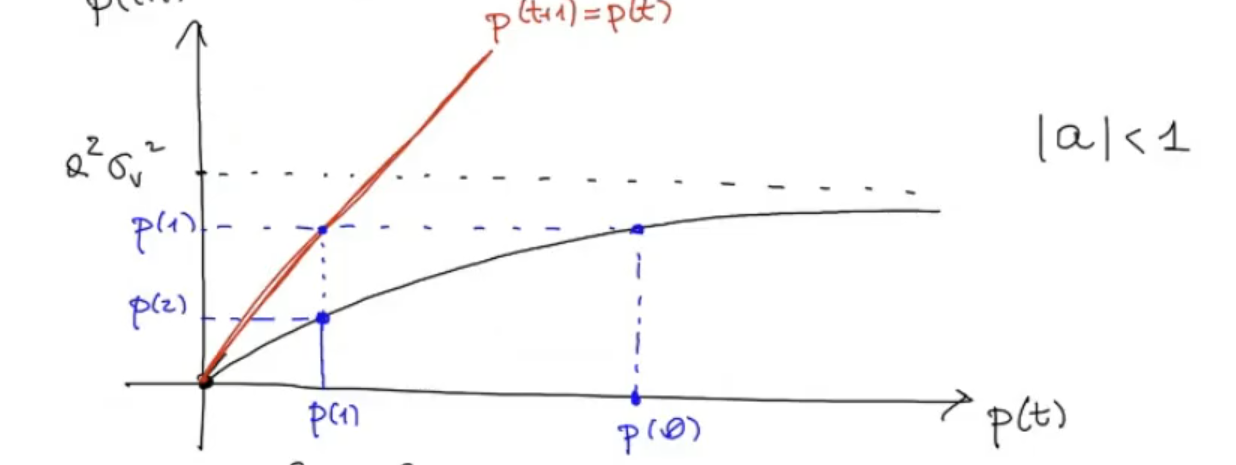 As we iterate, as we can see we will have that
As we iterate, as we can see we will have that
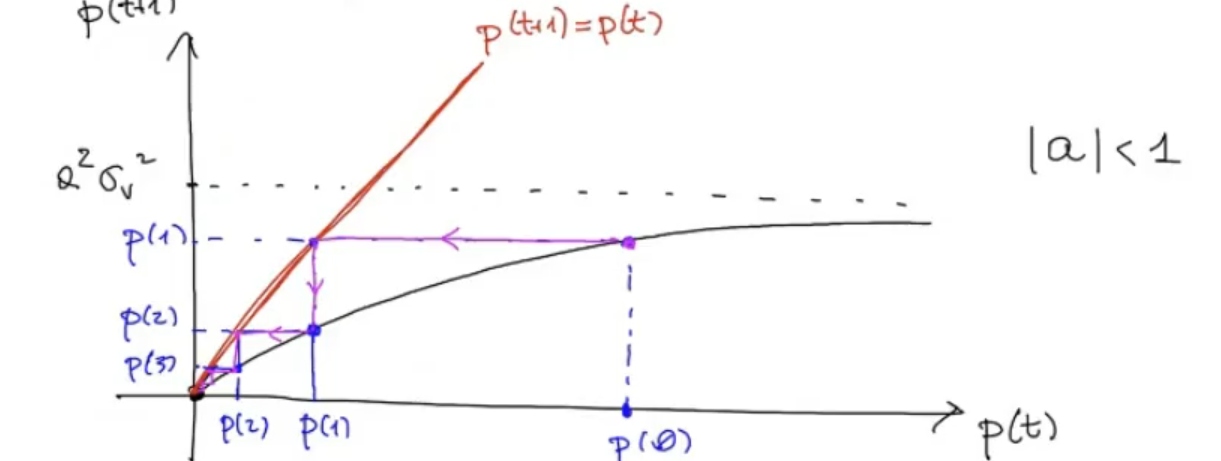 So we have shown graphically that that is true
So we have shown graphically that that is true
Let’s see what happens for , the starting graph looks something like:
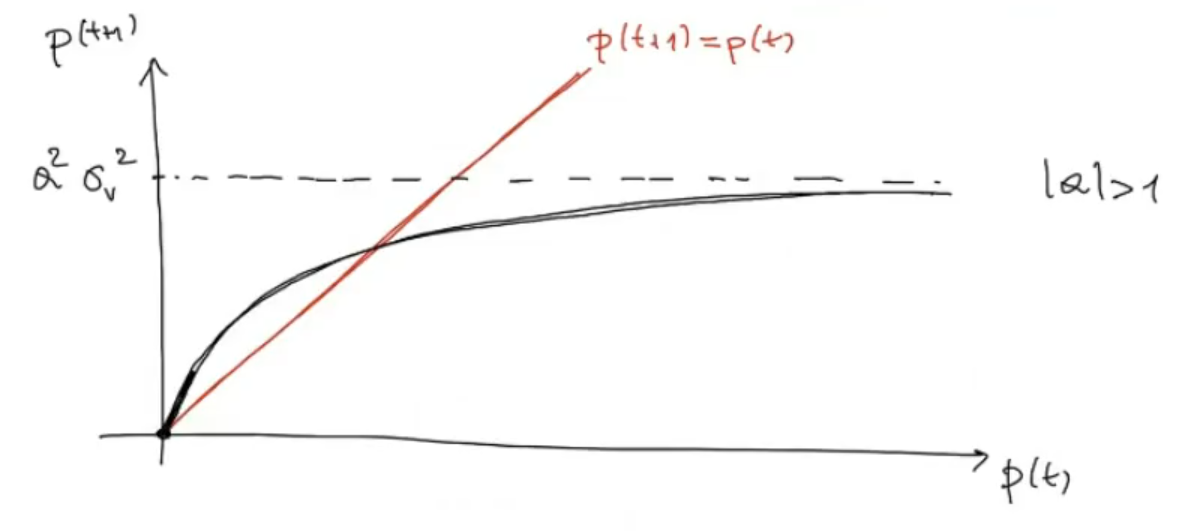 The point where the two curves intersect is:
The point where the two curves intersect is:
 So now doing like we did before we will obtain the limit:
So now doing like we did before we will obtain the limit:
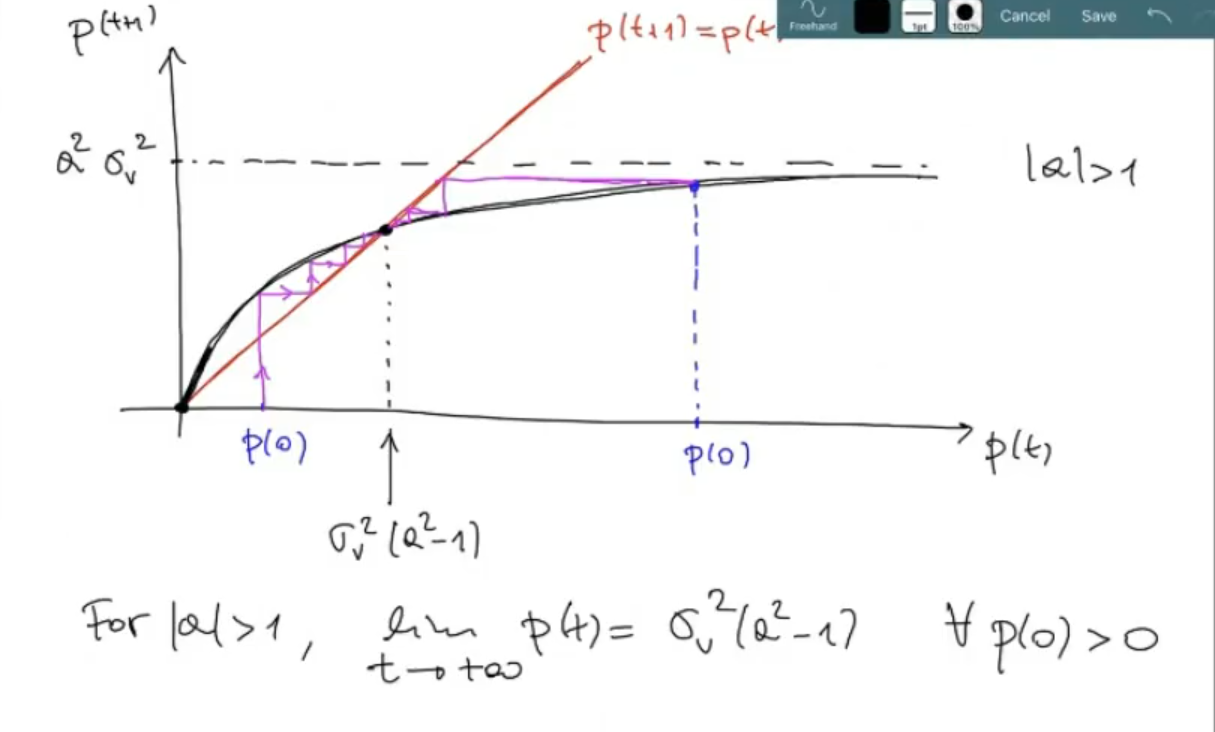 This is how we can find the two different solution of the DRE for and .
This is how we can find the two different solution of the DRE for and .
NOTE: is the only exception, for , and not
Let’s now see the case with the disturbance processes and :
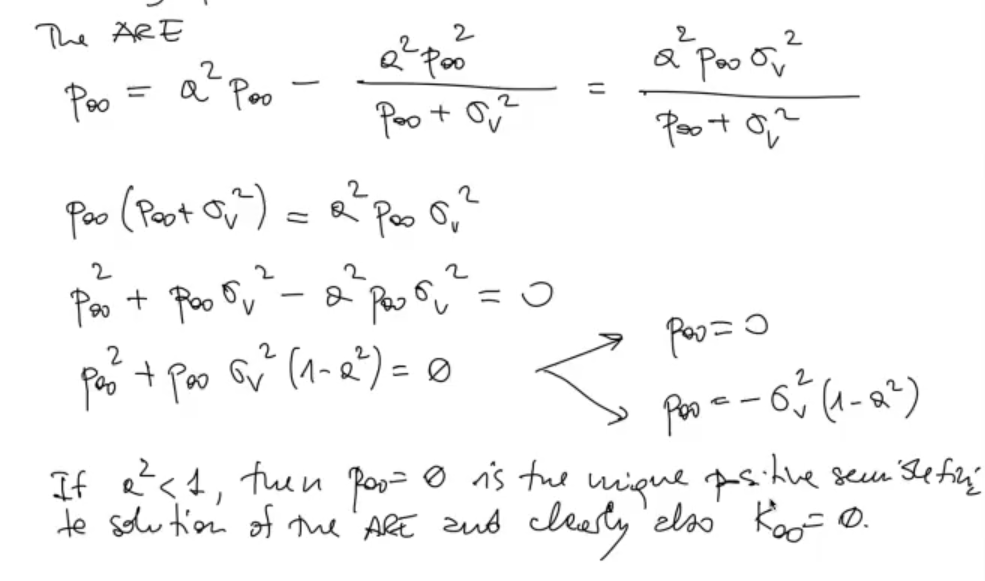
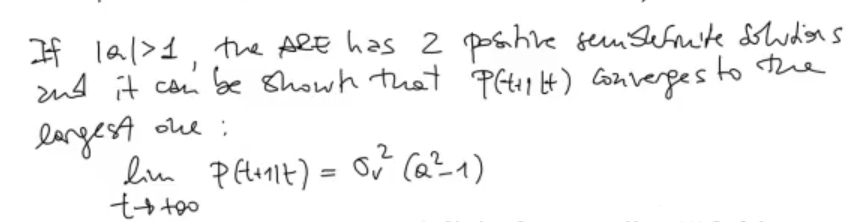
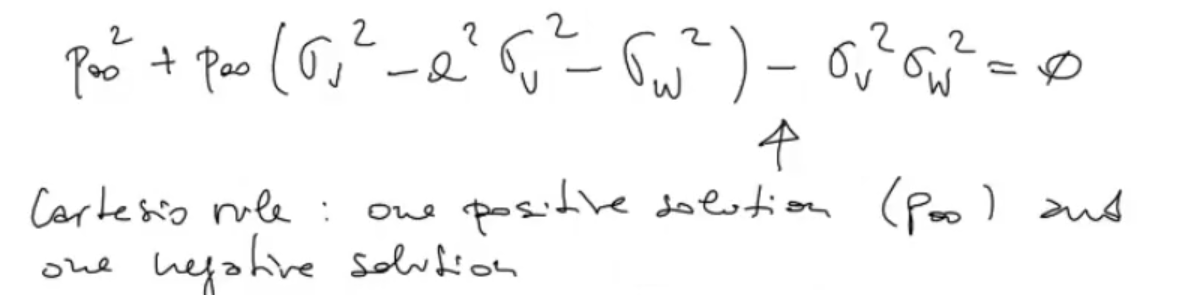
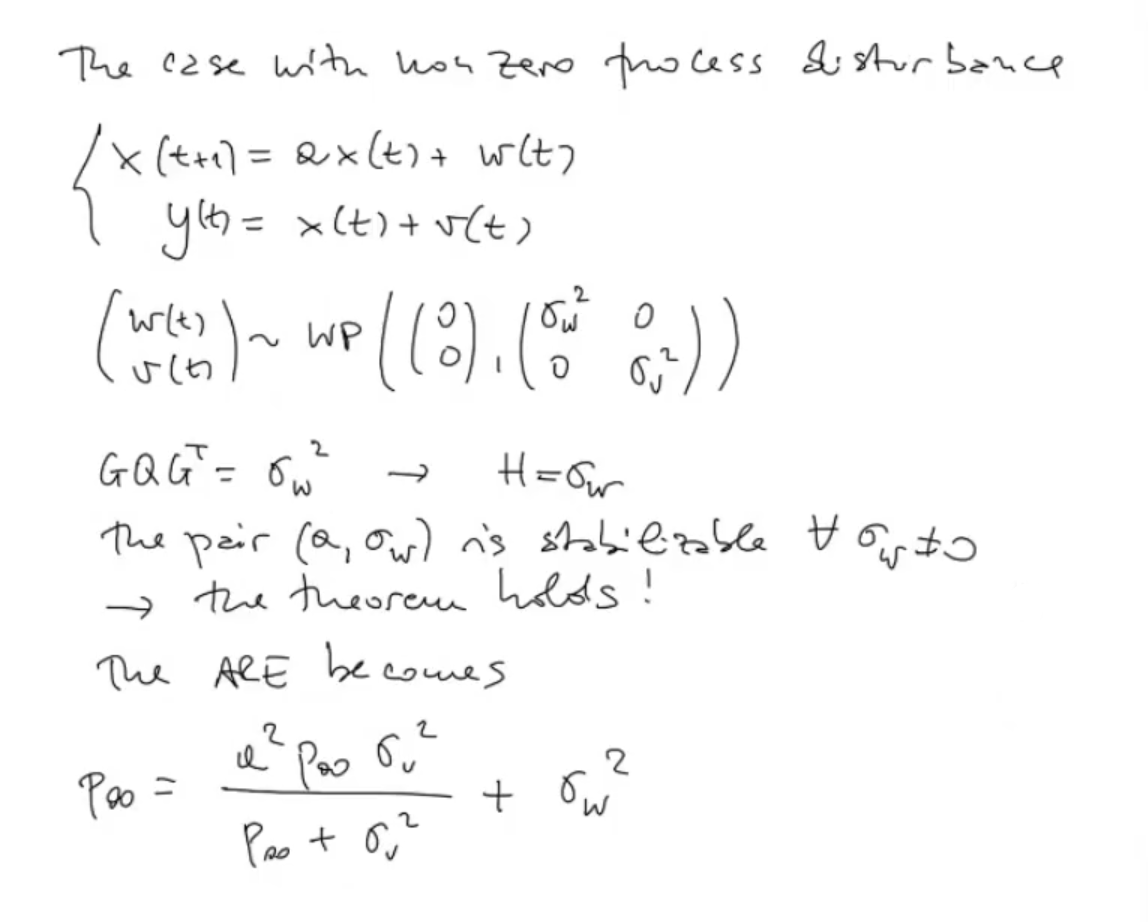 The theorem holds, so the ARE has an unique solution, as we can see solving the equation:
The theorem holds, so the ARE has an unique solution, as we can see solving the equation:


 Where:
Where:
- The positive solution will be our man,
- The negative solution, I don’t care, the variance is always positive.
 Even if the solution will always be .
Even if the solution will always be .