- As we have seen the prediction of the covariance of the error is equal to:
 Which is non-linear in
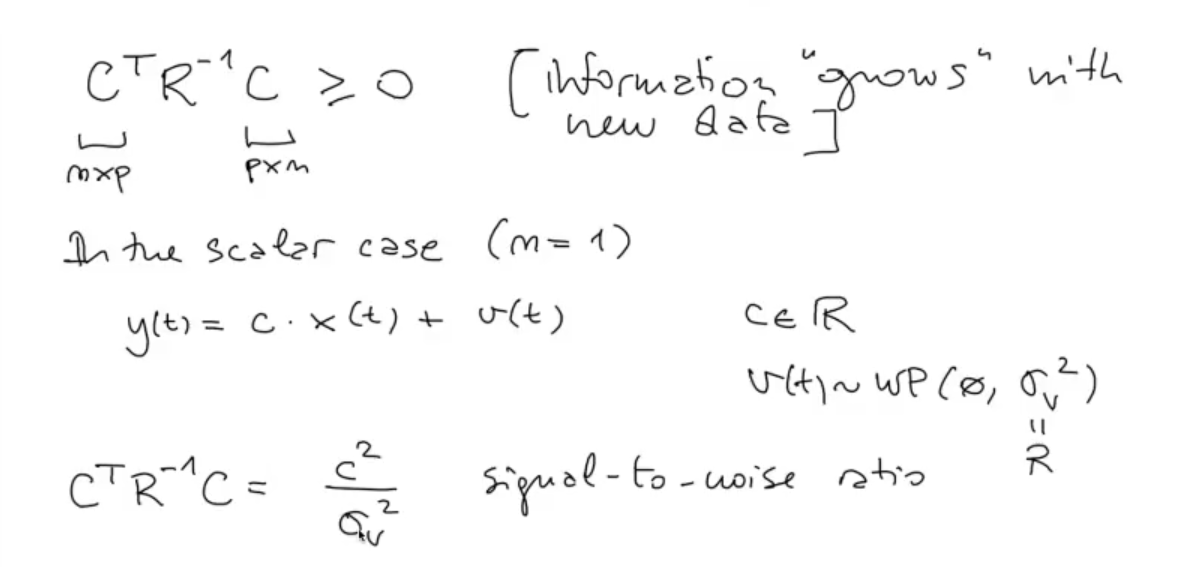
If we define the Information Matrix as:
Which is non-linear in
If we define the Information Matrix as:
 Using the matrix inversion Lemma:
Using the matrix inversion Lemma:
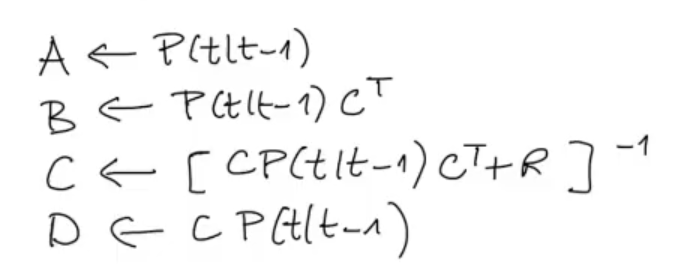
 with:
with:
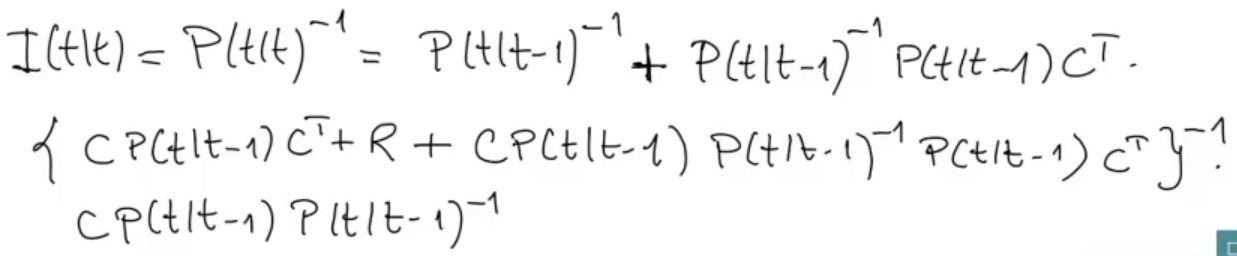
 We obtain:
We obtain:
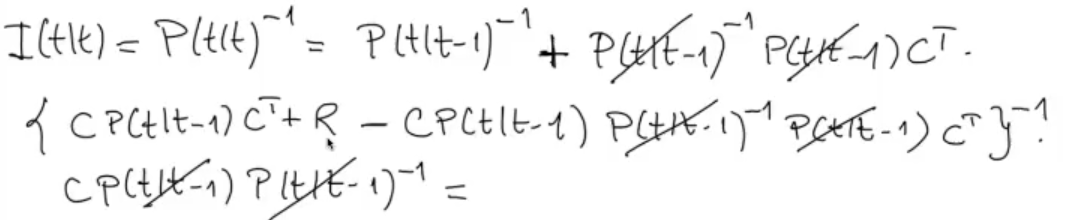
 We can simplify and rename as :
We can simplify and rename as :
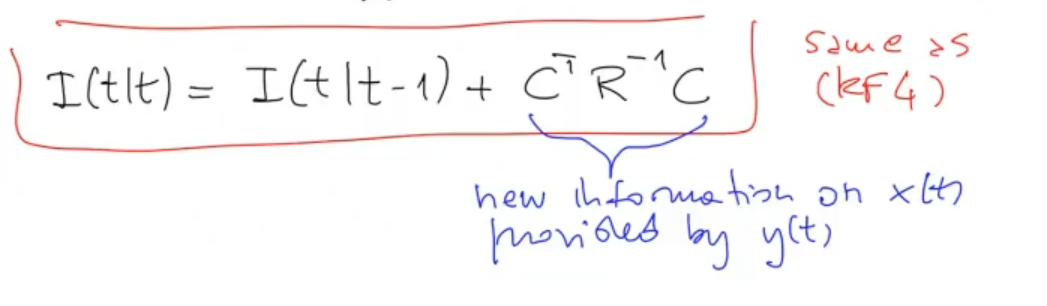
 So:
So:
 We can see the argument as:
We can see the argument as:
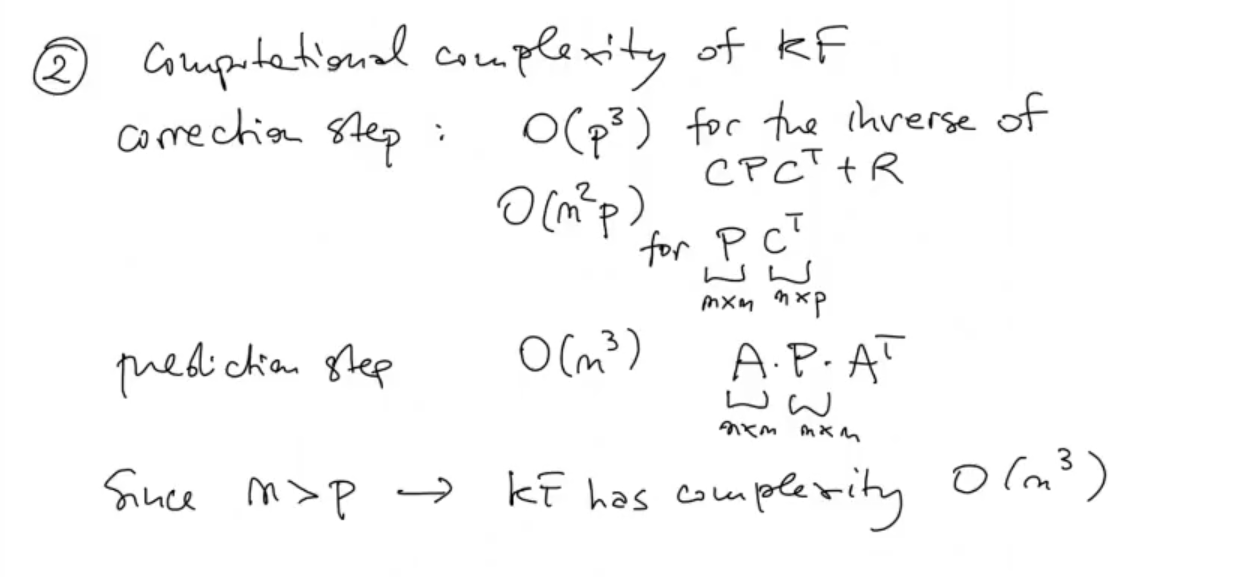
- Complexity of the KF algorithm:
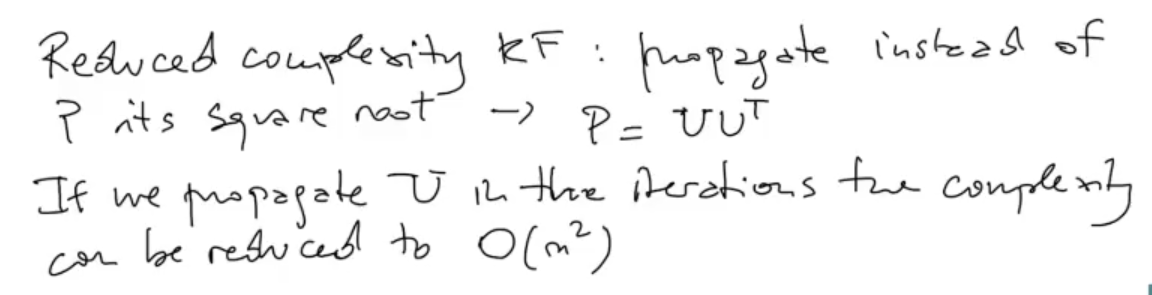
 We can reduce the complexity if we propagate , so we can reduce its size (from square matrix to a vector).
We can reduce the complexity if we propagate , so we can reduce its size (from square matrix to a vector).
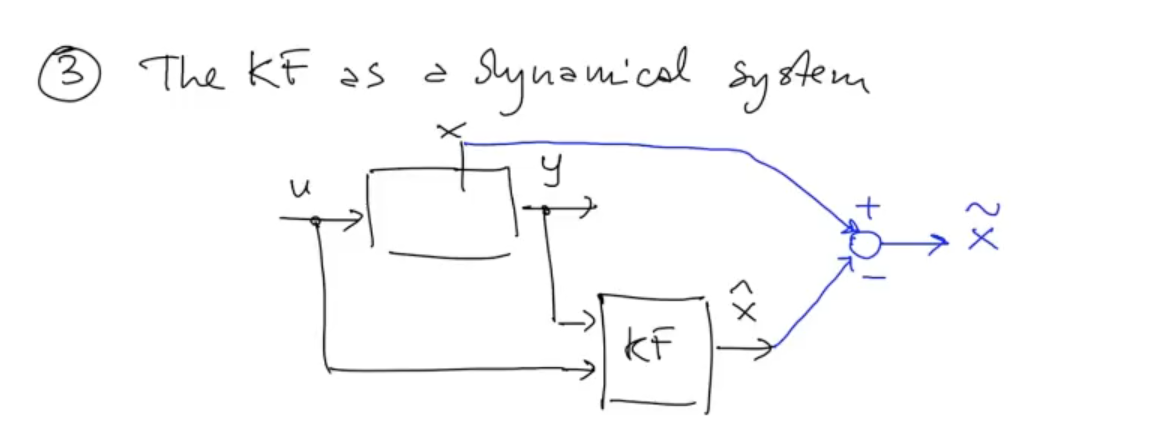
- Let us consider the KF as a dynamical system:
 To do this we substitute the 2nd expression of the KF algorithm:
To do this we substitute the 2nd expression of the KF algorithm:
 Into the 4th:
Into the 4th:
 as to obtain a single expression to update the state:
as to obtain a single expression to update the state:
 We group , and :
We group , and :
 This is now a dynamic system, where the matrices are defined as follows:
This is now a dynamic system, where the matrices are defined as follows:
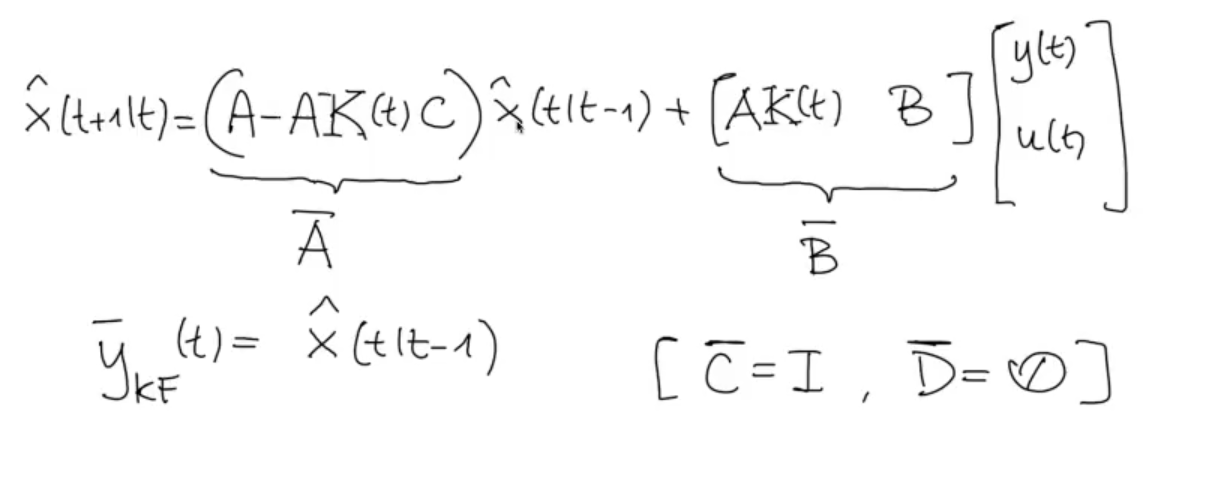
NOTE: The KF is a LTV (Linear Time Varying) dynamic system
The output is:
 We can now group to obtain:
We can now group to obtain:
 So the complete system can be re-written a dynamic system with matrices:
So the complete system can be re-written a dynamic system with matrices:
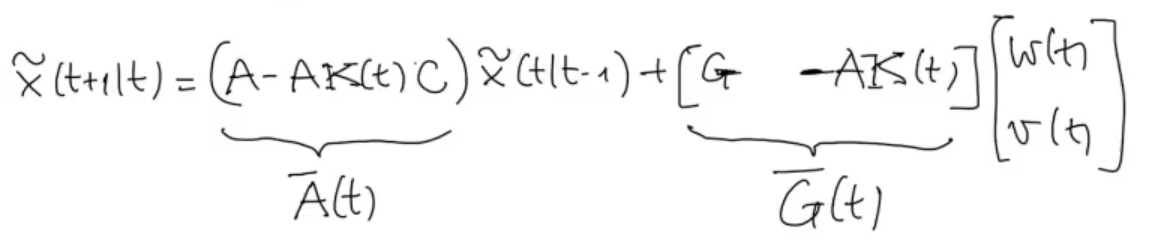
NOTE: It is independent form the input . The source of the error are the noises and .
Then, the MSE:
 Now we can say, since it is iterative, that:
Now we can say, since it is iterative, that:
 Tho it’s also true that:
Tho it’s also true that:

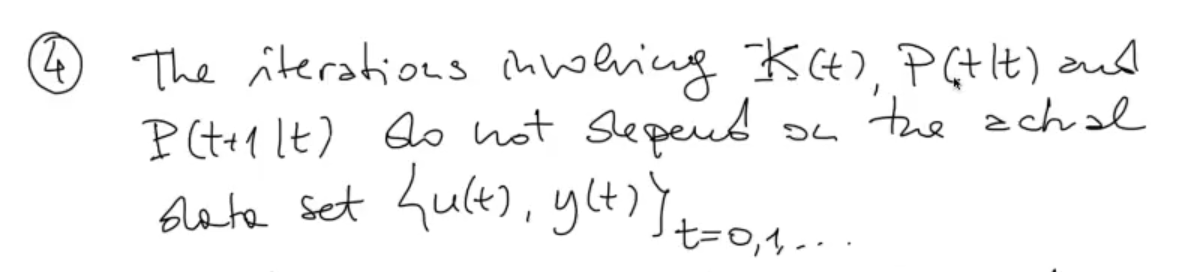
We can see how evolves with time, and see if we can describe it as a dynamic system.
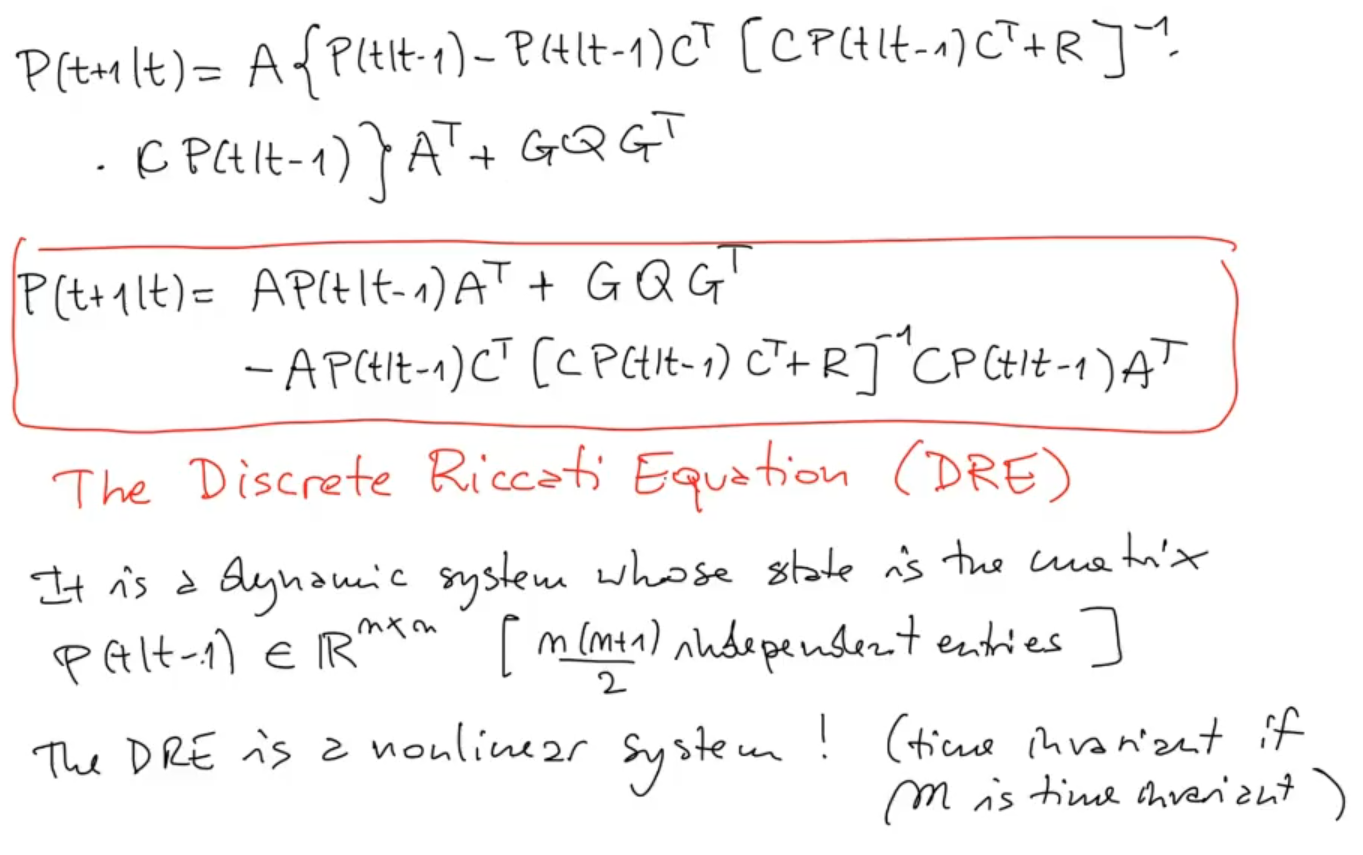 The independent entries are not because the state, the matrix is a symmetric, so they are independent entries.
The independent entries are not because the state, the matrix is a symmetric, so they are independent entries.
Also the system is Non-Linear in , because of the second component of the equation.
But if the model is time invariant, specifically do not depend on time, are constant matrices then this dynamic system is Time-Invariant (still non-linear).
-
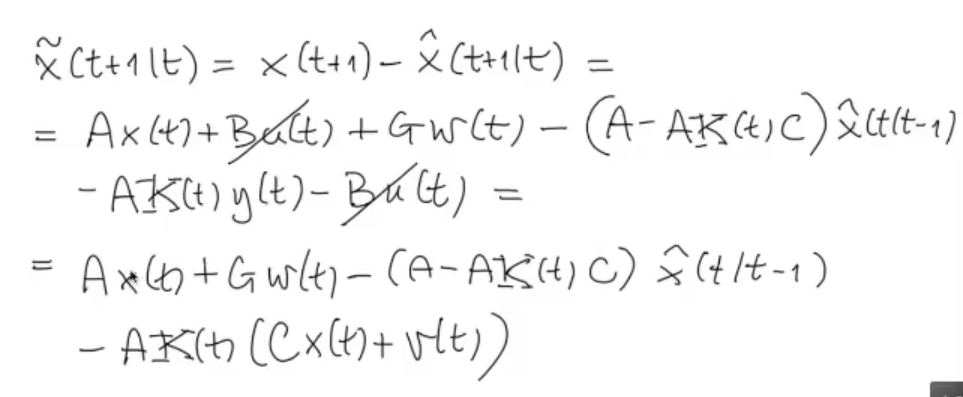
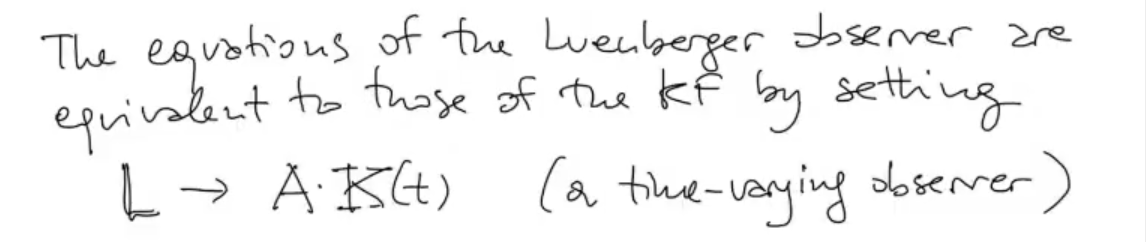
As we have seen in the previous point:

-
The KF is a state observer: Let’s consider only the deterministic part of the KF base system:
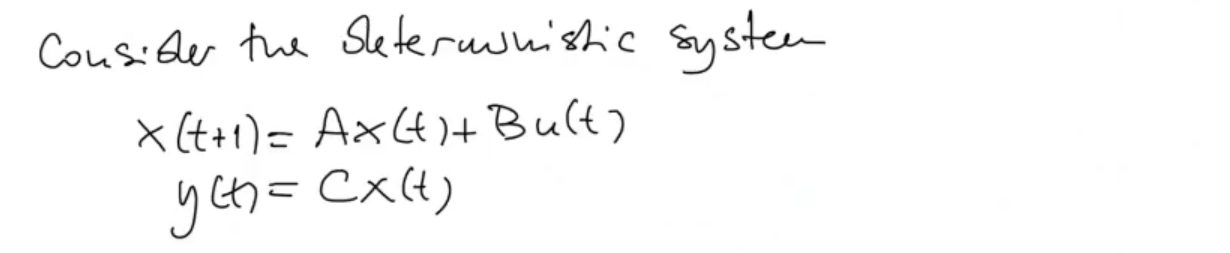 We know that for this system we can construct a state observer:
We know that for this system we can construct a state observer:
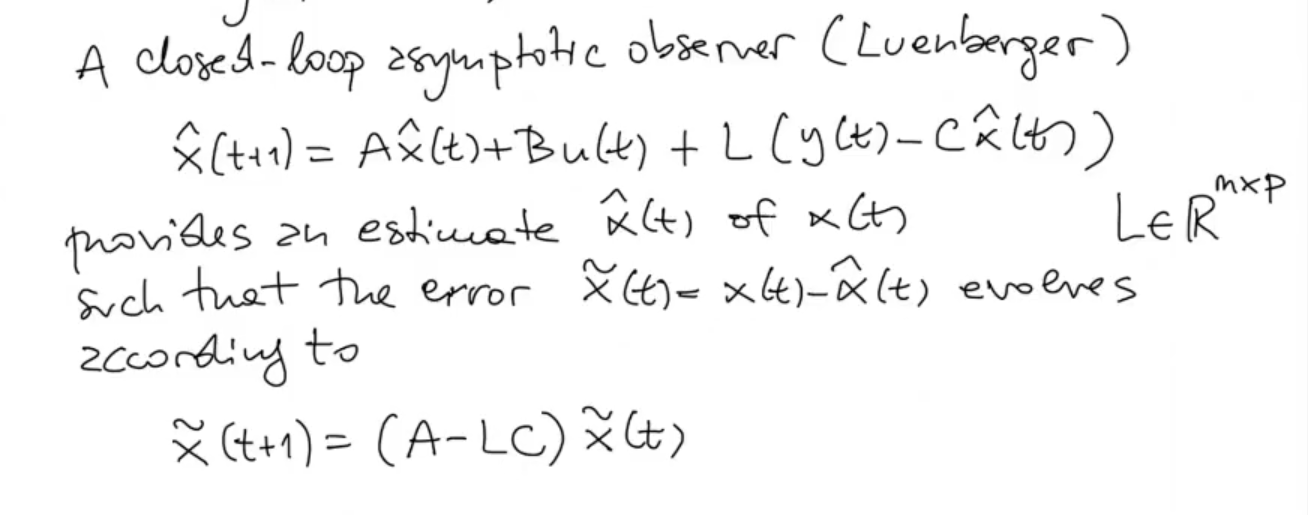
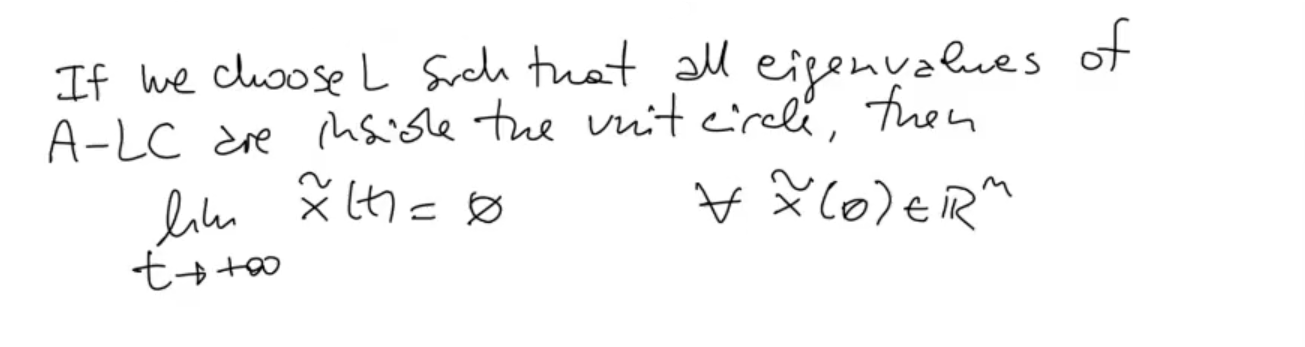 (The system becomes asymptotically stable).
(The system becomes asymptotically stable).
So if the system is asymptotically stable the error will converge to zero, and the estimate of the state will be equal to the actual state, that’s why it’s called asymptotic observer.
Is it always possible to do this?
A sufficient condition is:
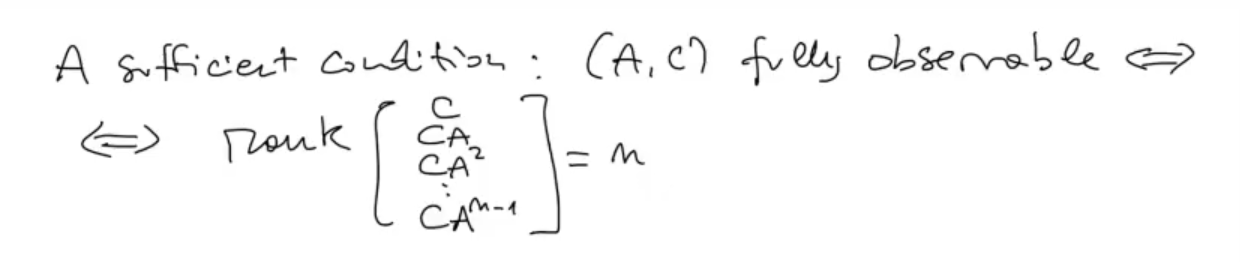 Where is the dimension of the state.
Where is the dimension of the state.
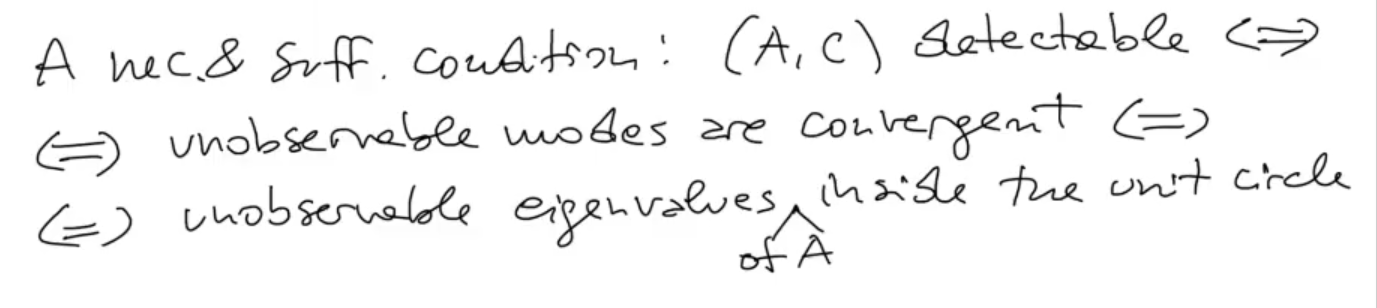
Another condition, less strict condition is:
- Let us consider now the innovation process as as dynamic system:
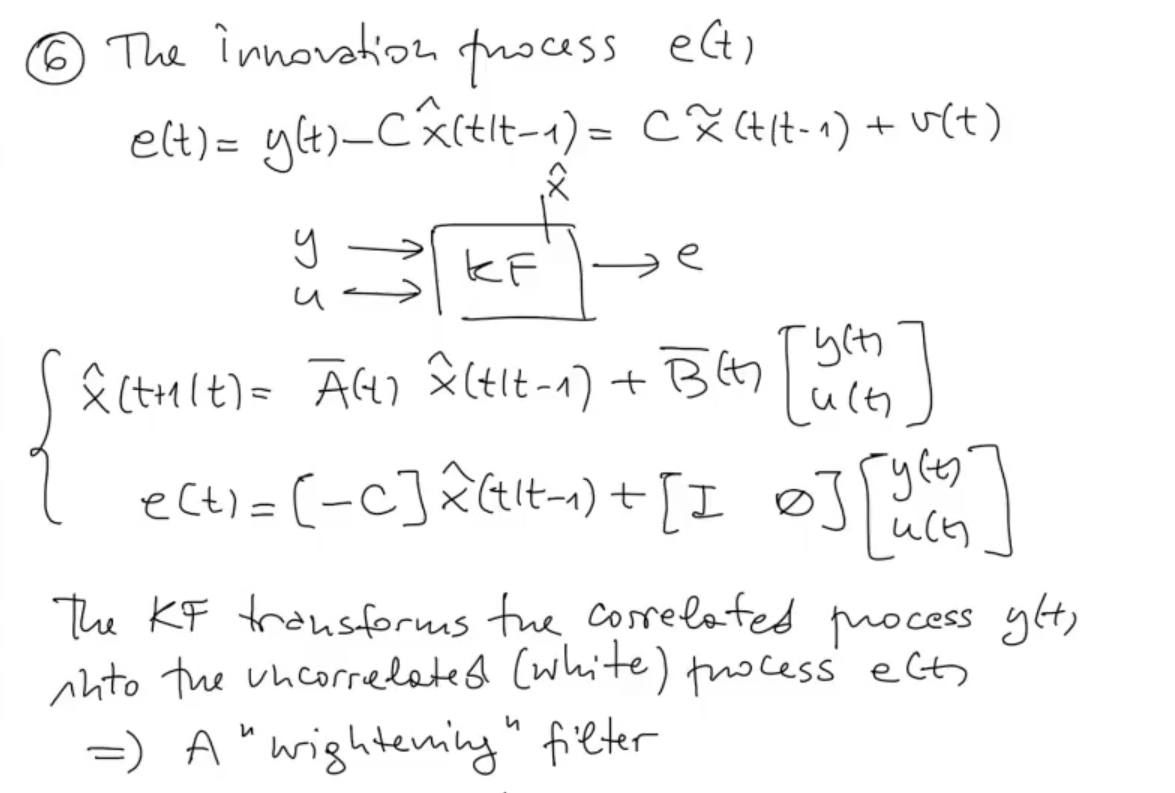 This uncorrelation is what allowed us to do a recursive correction step in the KF algorithm.
This uncorrelation is what allowed us to do a recursive correction step in the KF algorithm.