Explanation of the Algorithm
~Example taken from Youtube
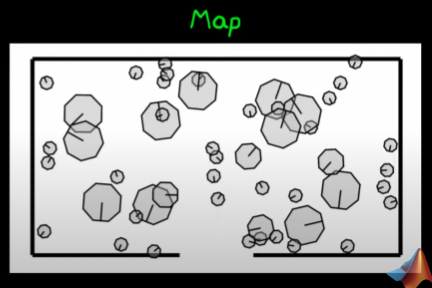
Given the map of a building an a robot with a laser sensor we want to estimate the position of the robot.
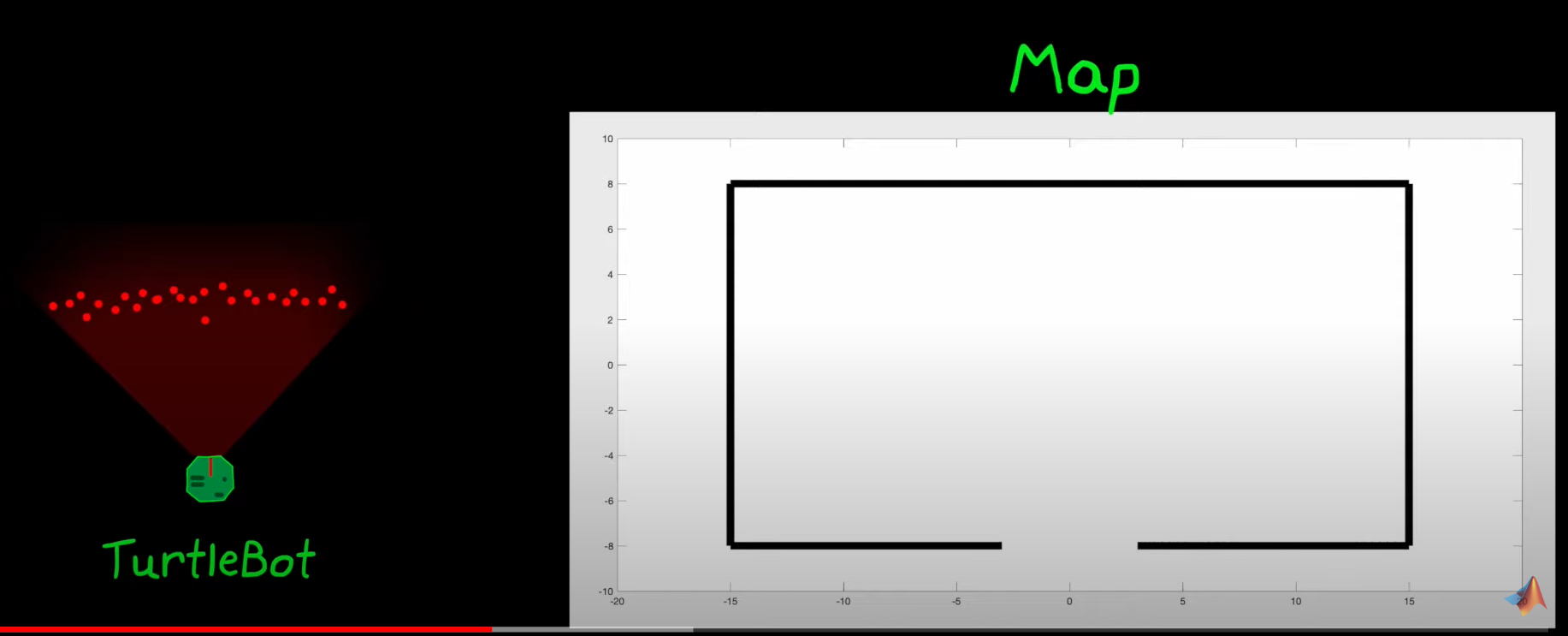
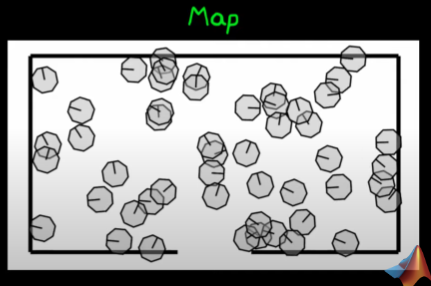
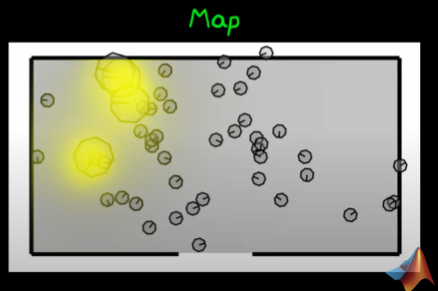
- The robot could be anywhere on the map, to do this I take a finite set of randomly taken bot (random position, random orientation) and put the in a simulated map:
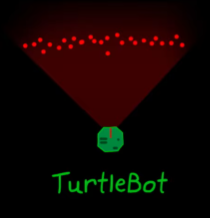
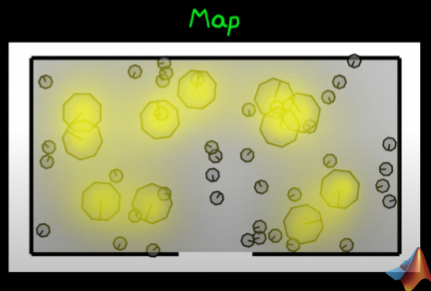
- I take the measurement of the bot:
- I estimate where the robot could be (considering a possible error in the measurements) and highlight the more probable simulated robots:
 New simulated pdf:
New simulated pdf:
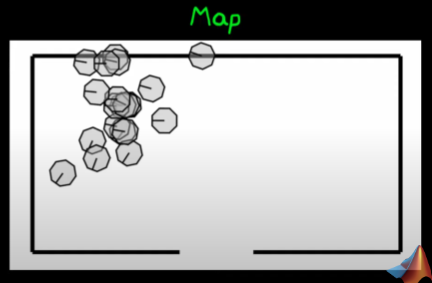
- Using the new pdf i re-randomize the simulated robots and their positions:
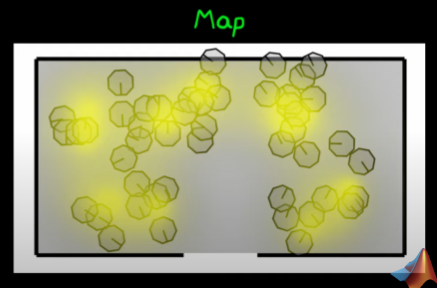
- I repeat the process:
- Measurement.
- Estimation of pdf.
- Randomize new simulated robots.
This Algorithm is also known as MCL (Monte Carlo Localization). A variant of this algorithm, the AMCL ( Adaptive Monte Carlo Localization) reduces the number of simulated robots at each iteration, to speed up the algorithm, it’s a little less precise, but much more quick.
Algorithm
- Initialization:
- We need to know the pdf: , , as well as the functions and .
- Generate particles according to the distribution
- Generate particles according to the distribution
- Which are the particles rappresentative of the distribution
- Generate a set of weights such that:
- Create a new discrete distribution function such that:
- Using the new restart from point (1.)