Summary
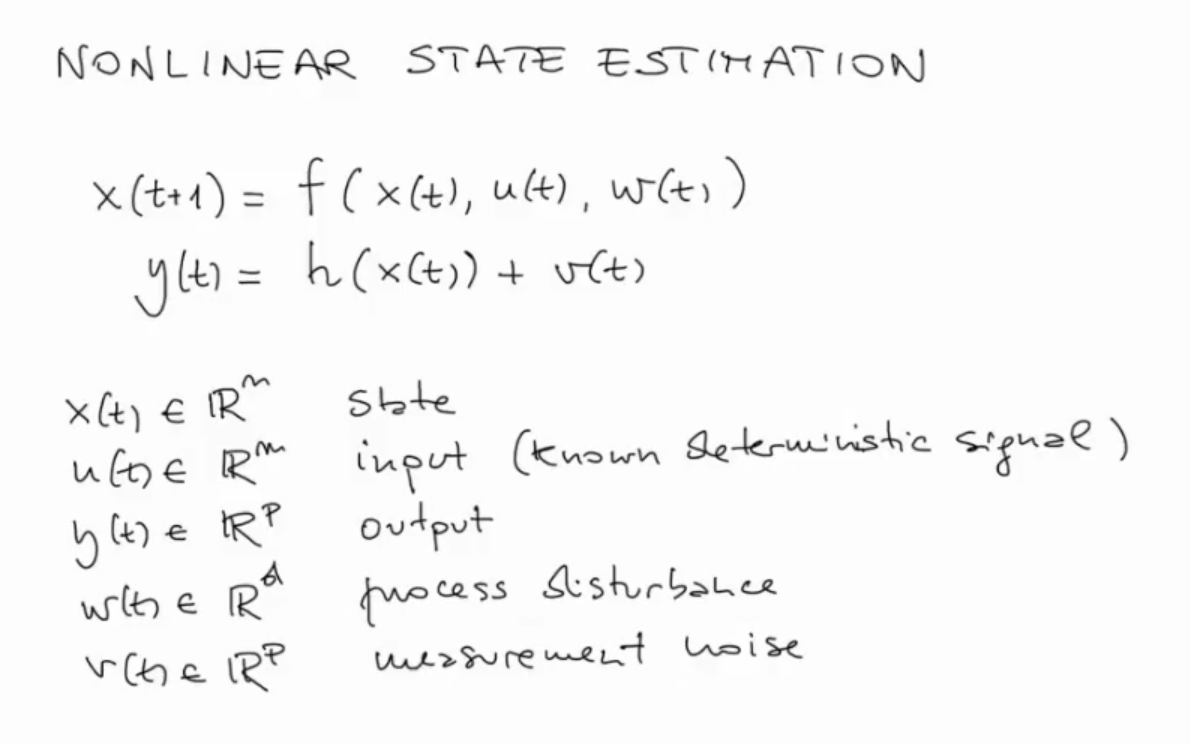
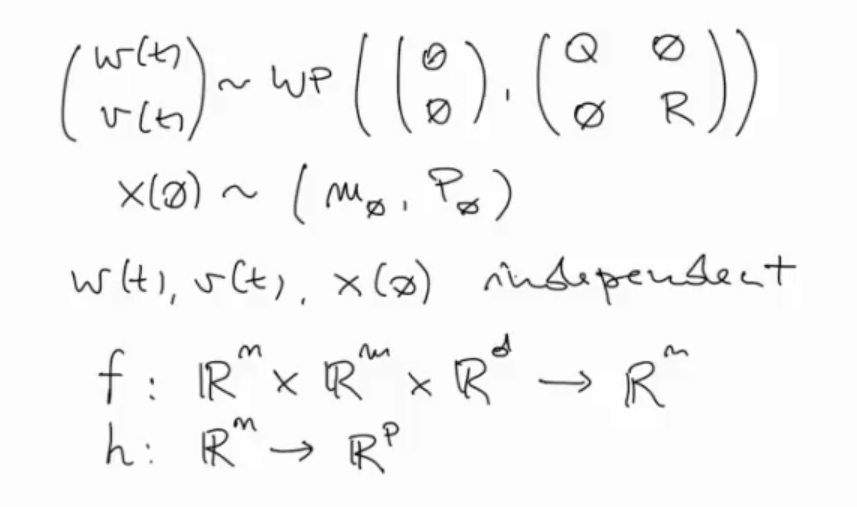
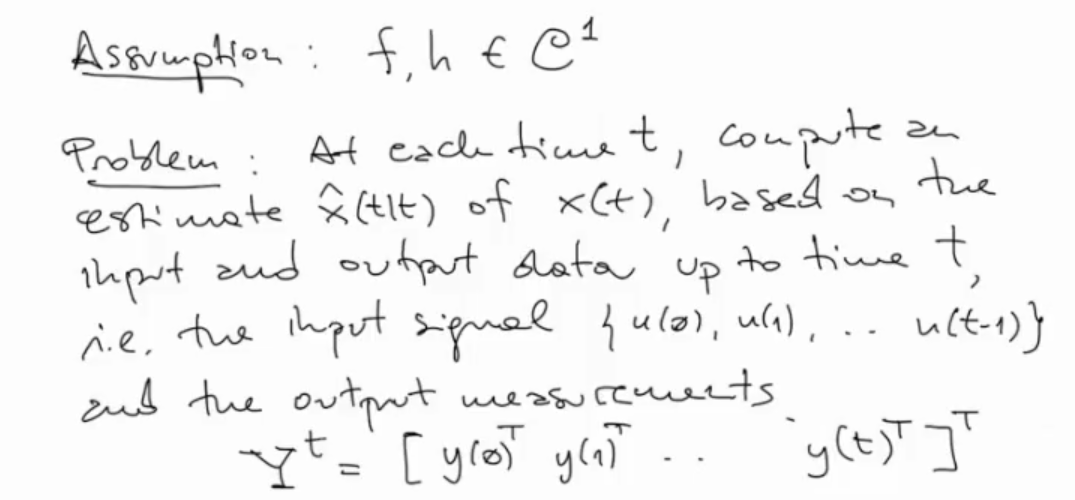
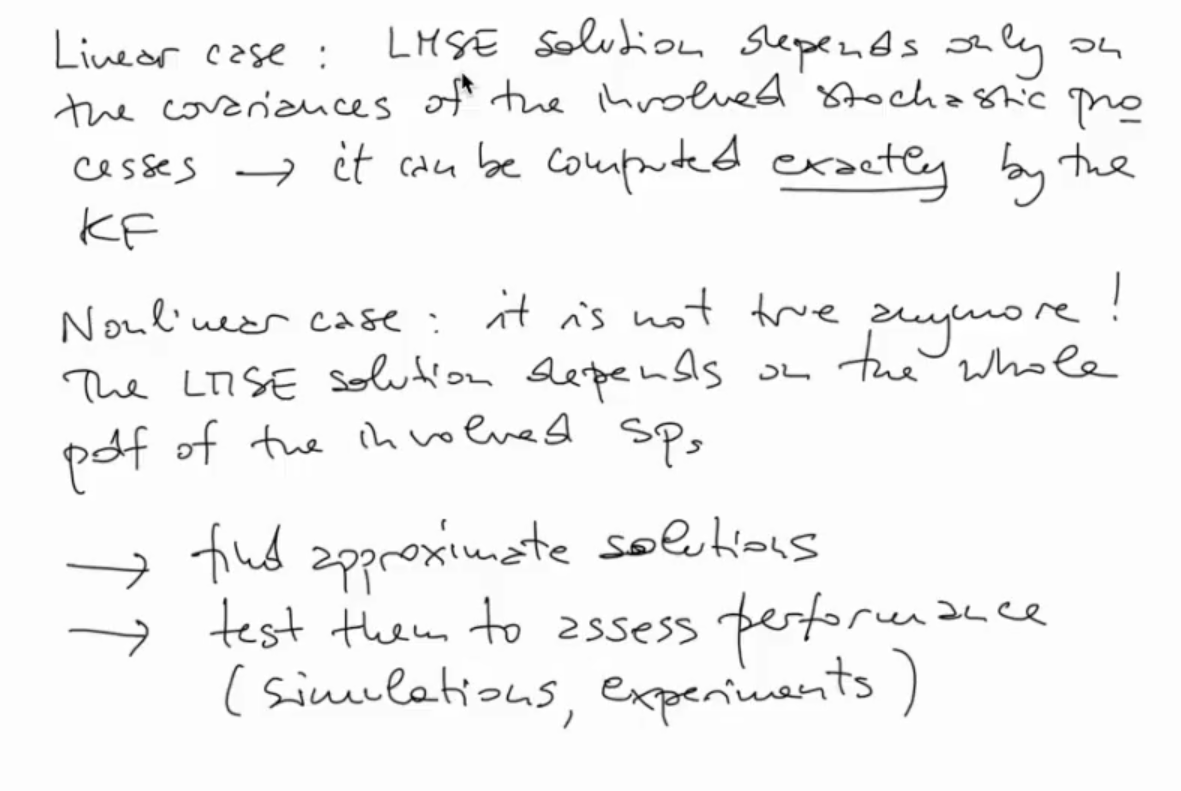
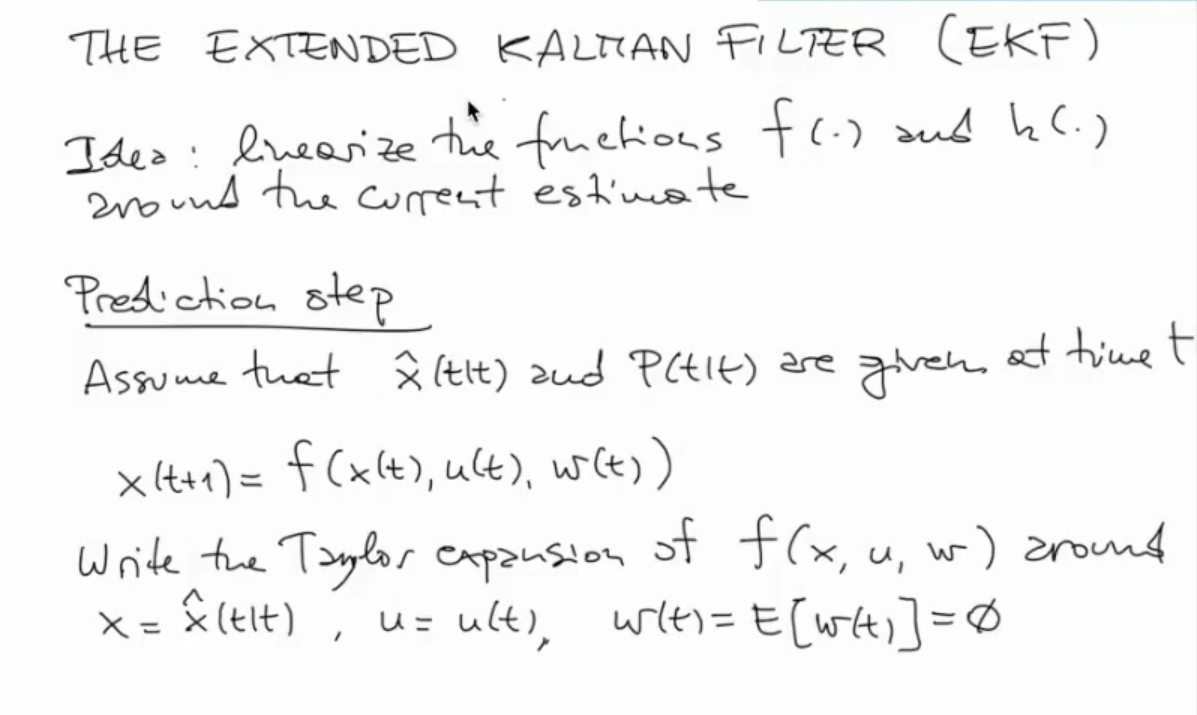
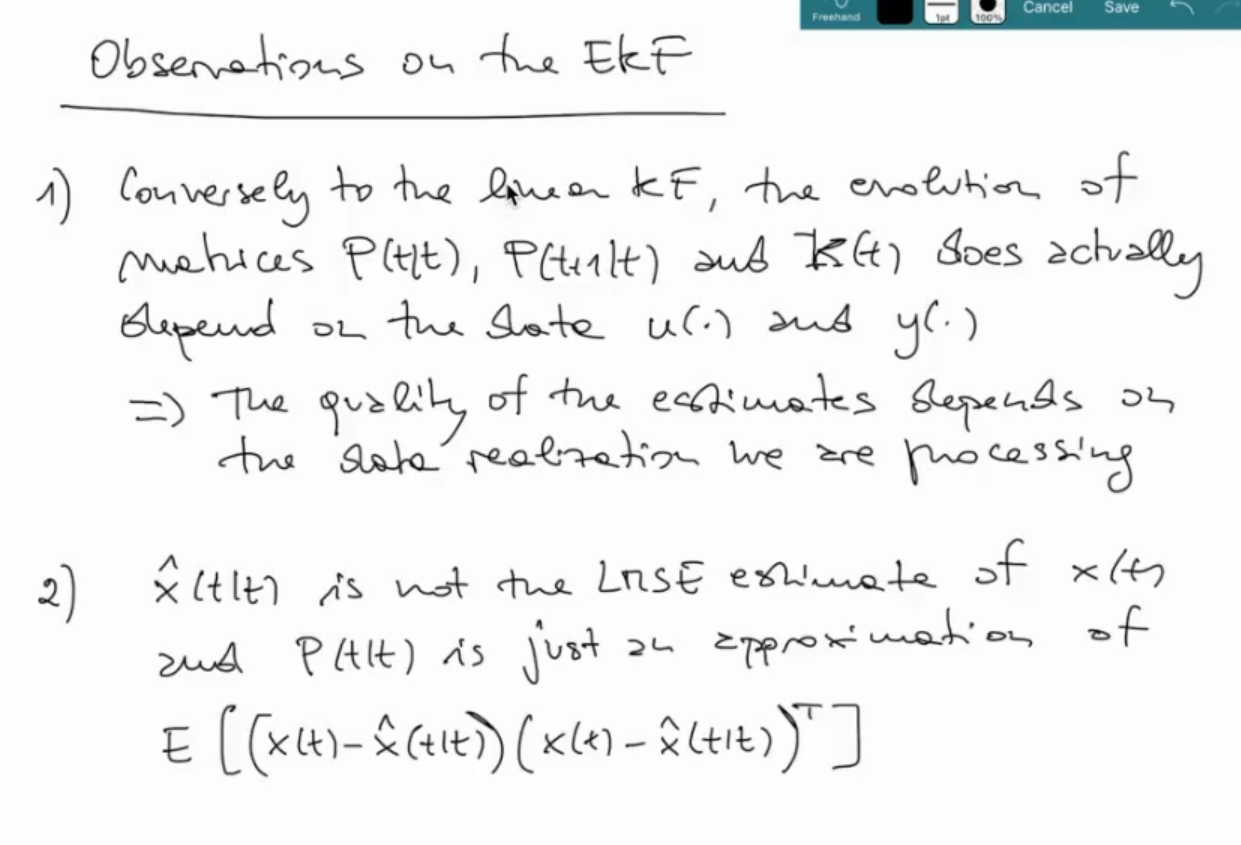
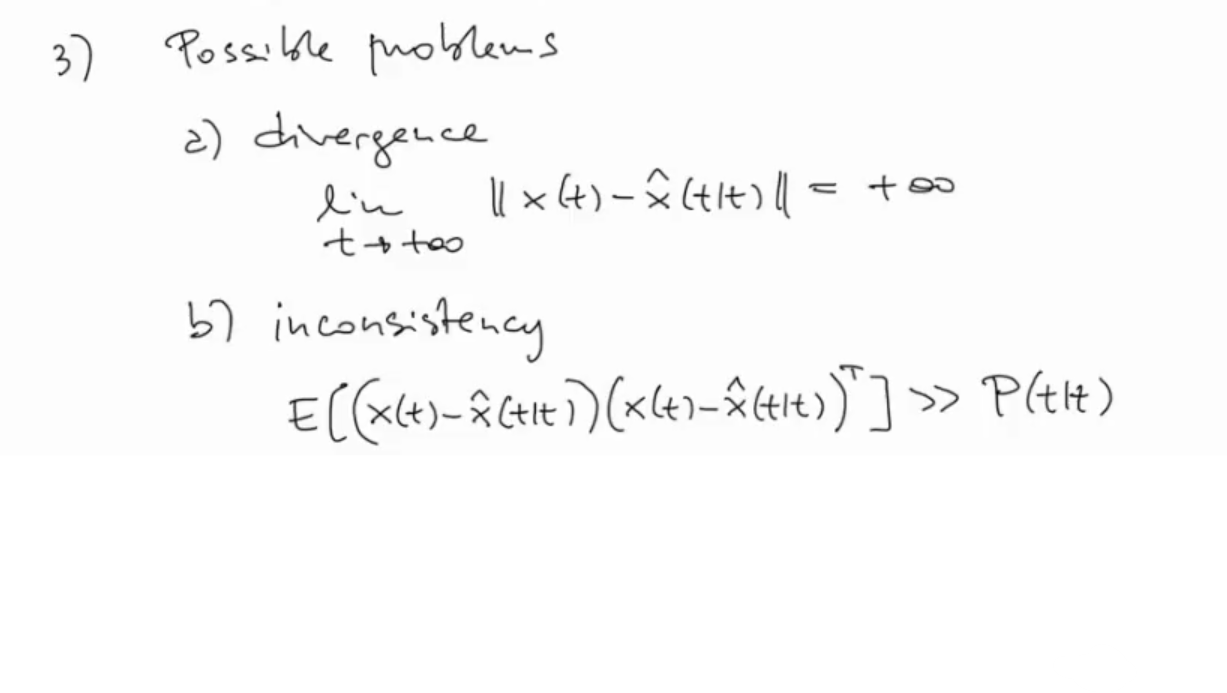
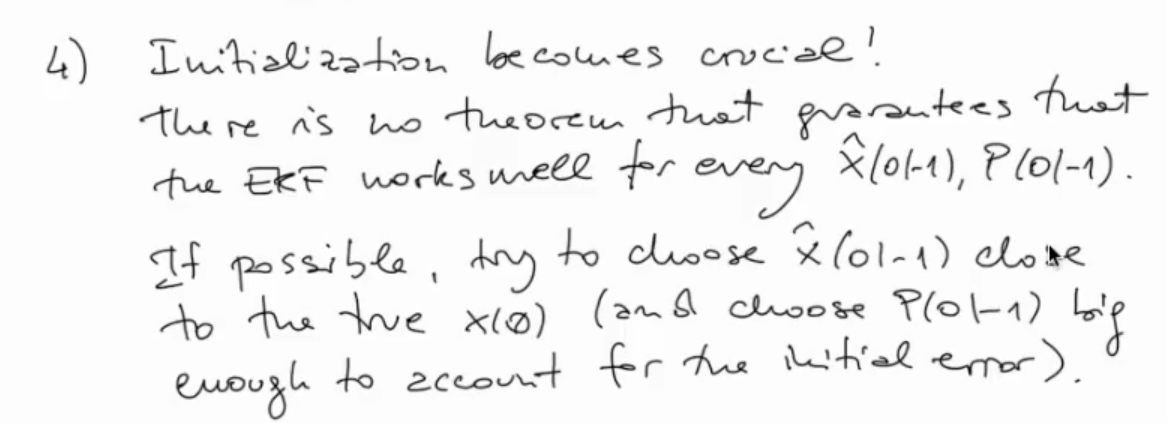
We want to apply the theory behind the Kalman Filter to non-linear system.
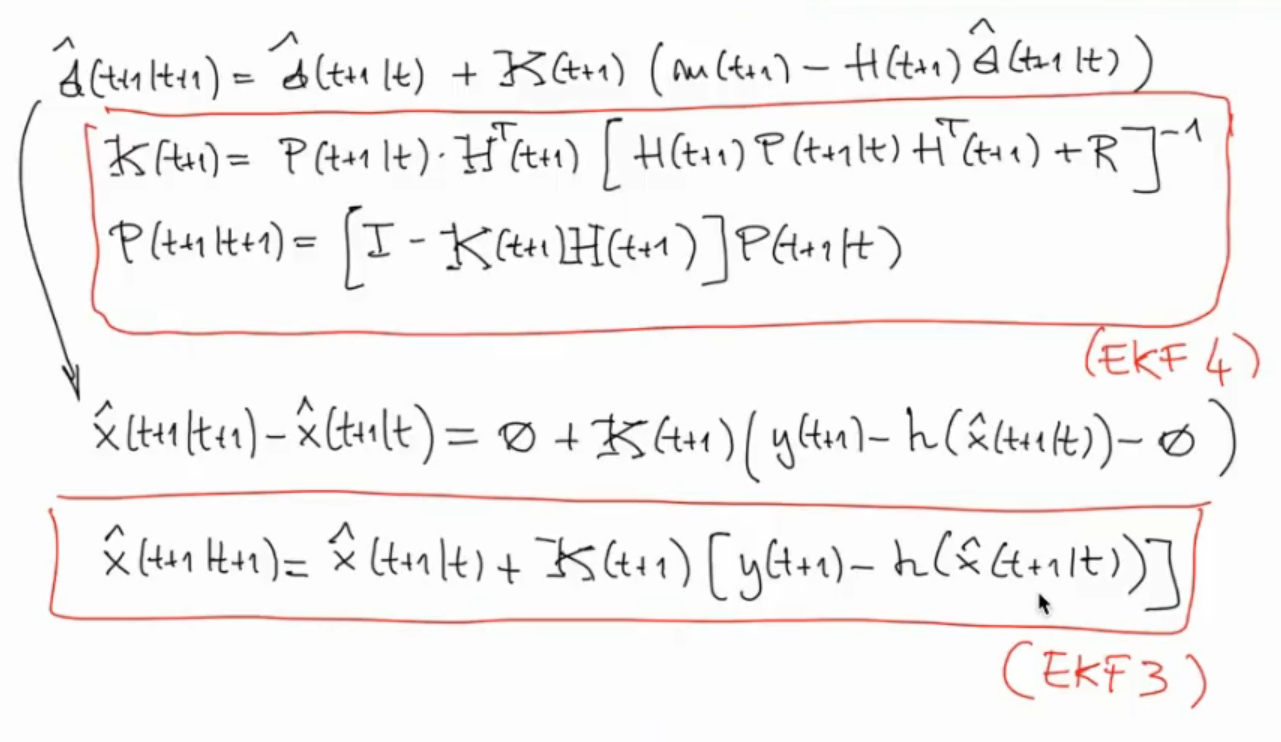
We can use the algorithm for the Extended Kalman Filter, that we can found here: EKF Algorithm (Wikipedia)
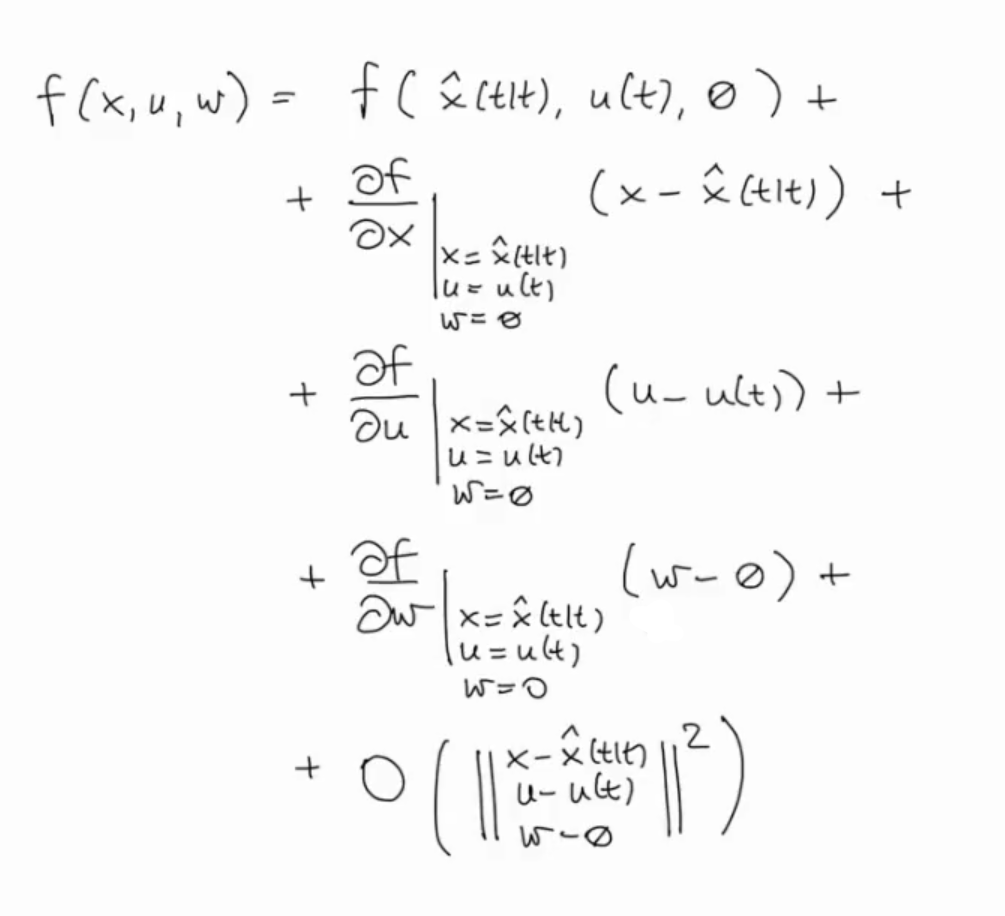
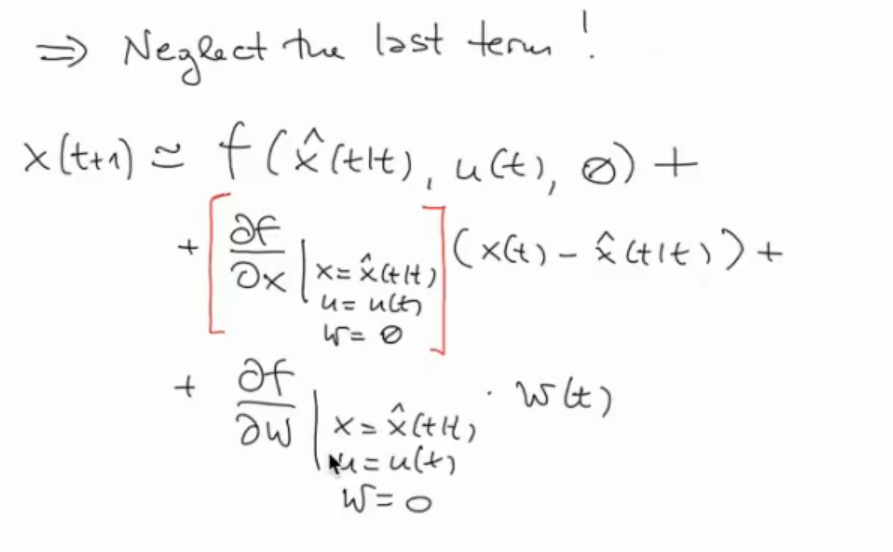
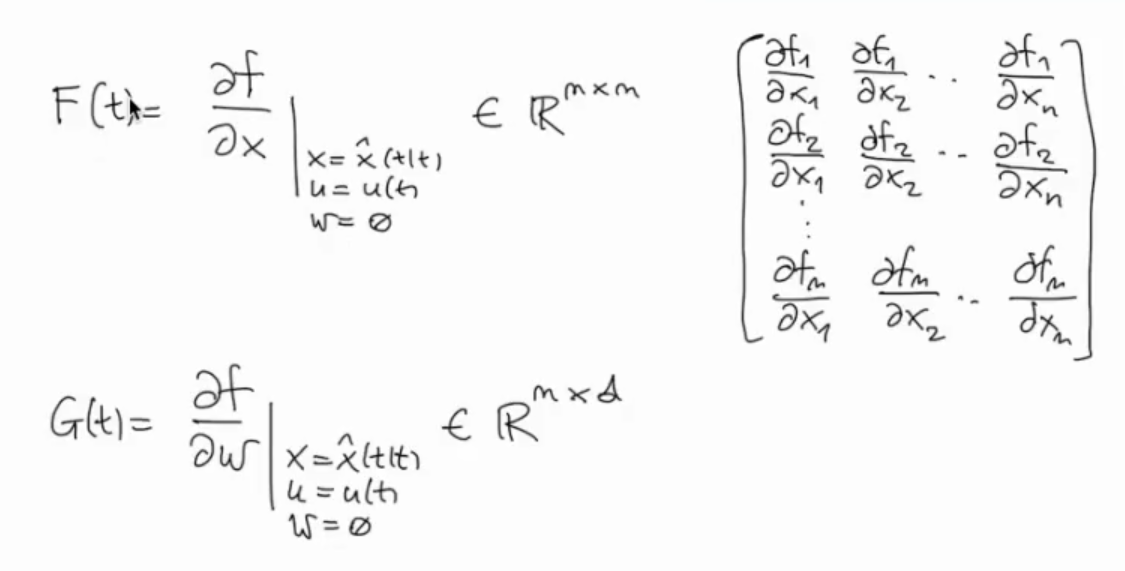
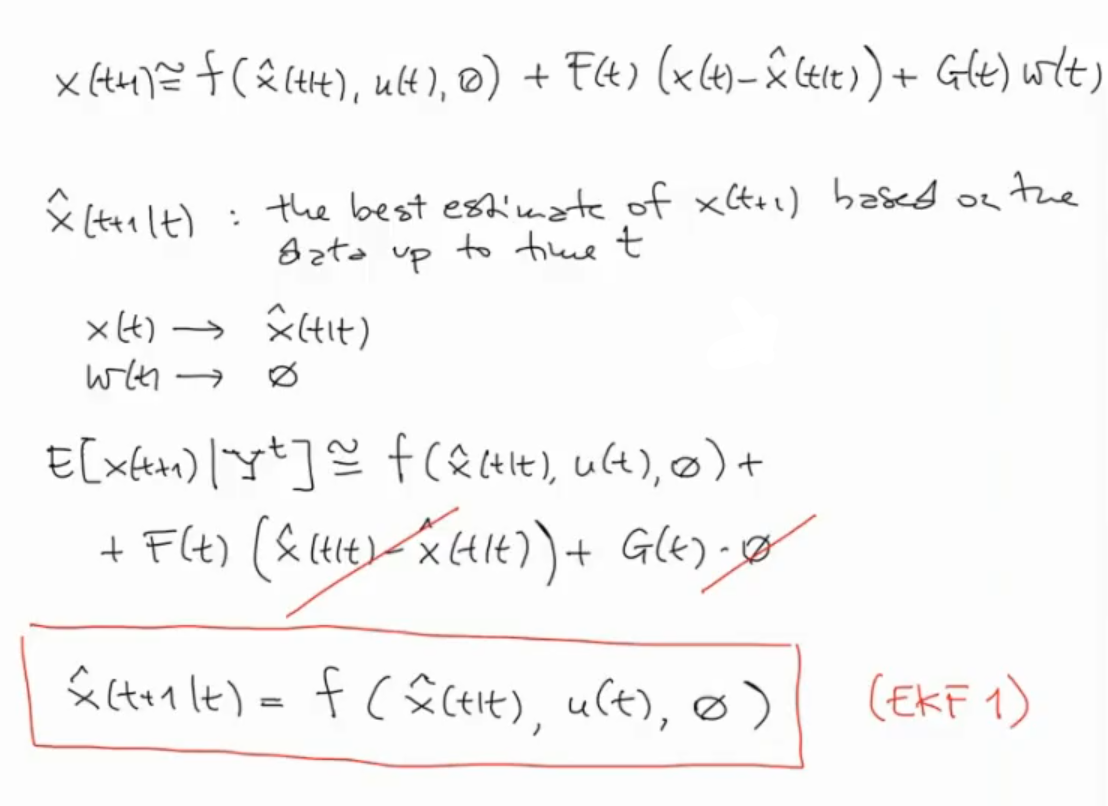
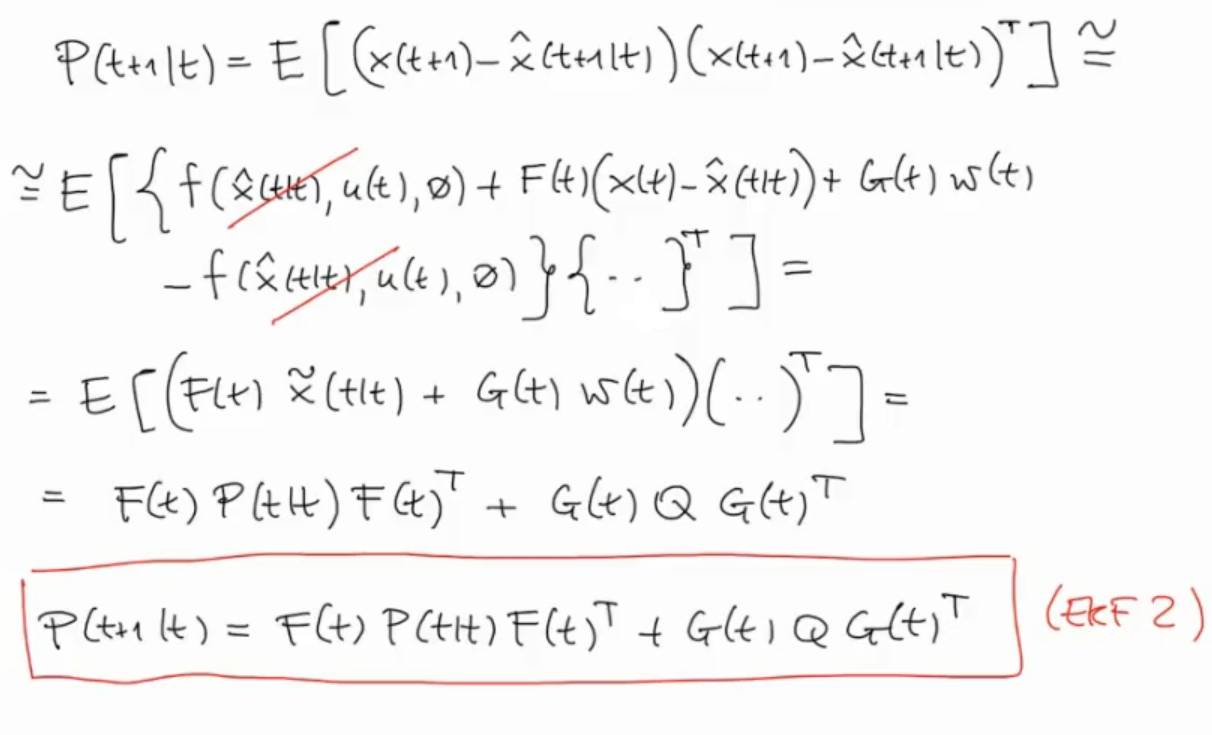
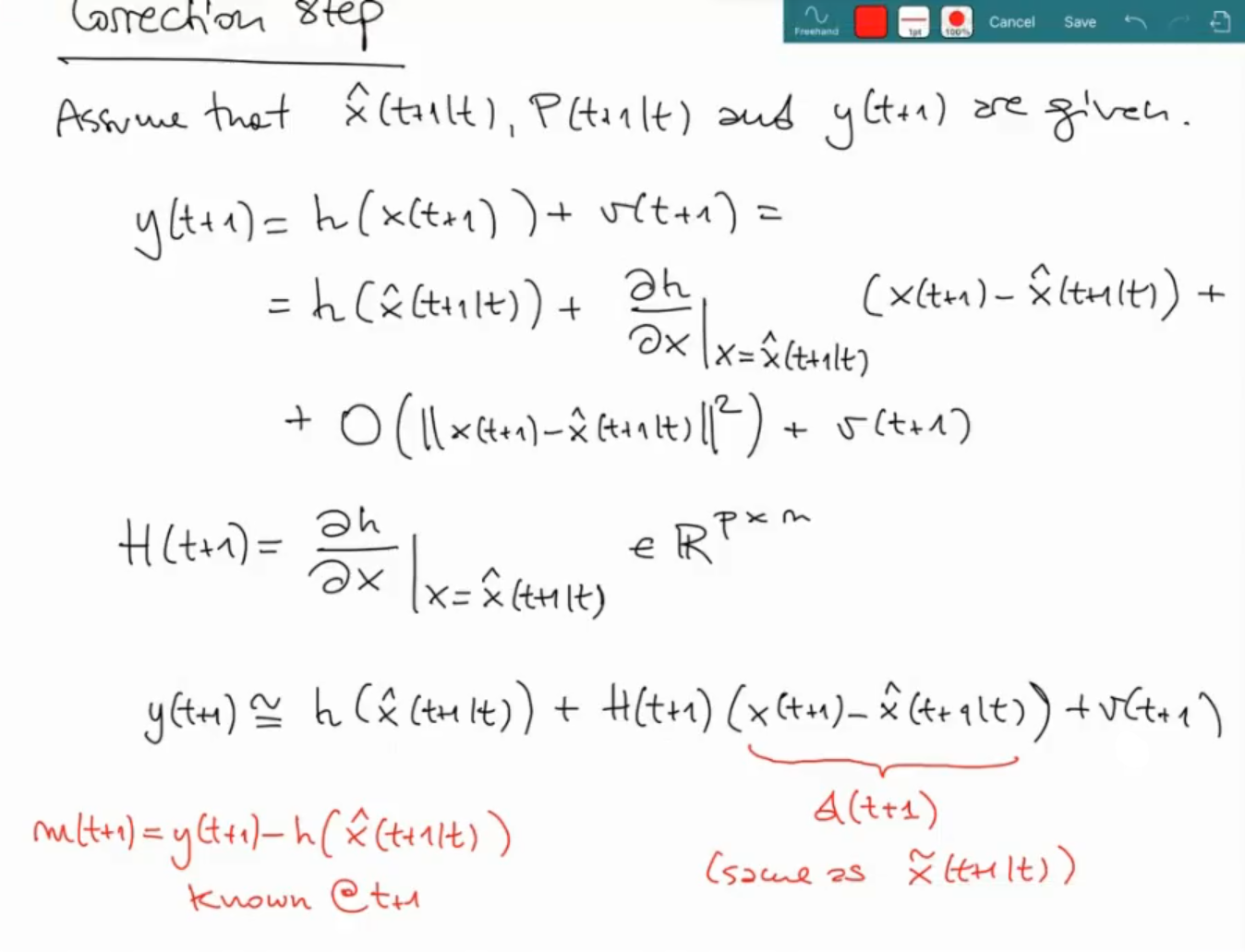
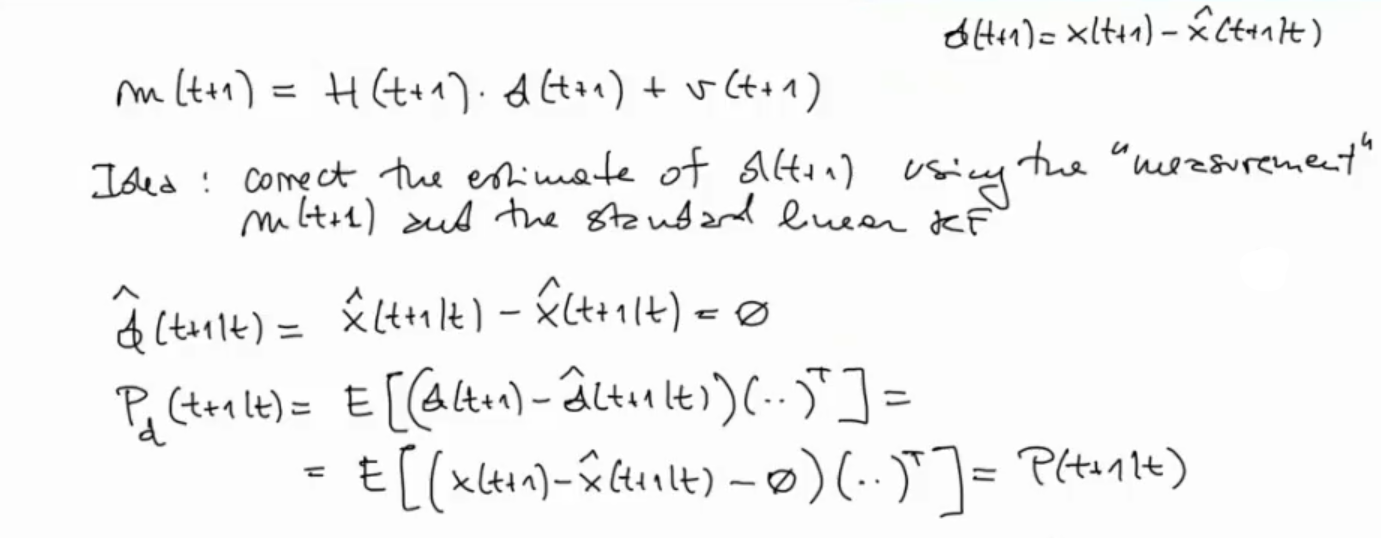
The Idea behind the EKF is to linearize the two functions and using their Jacobean Matrices (derived for , and ).