Summary
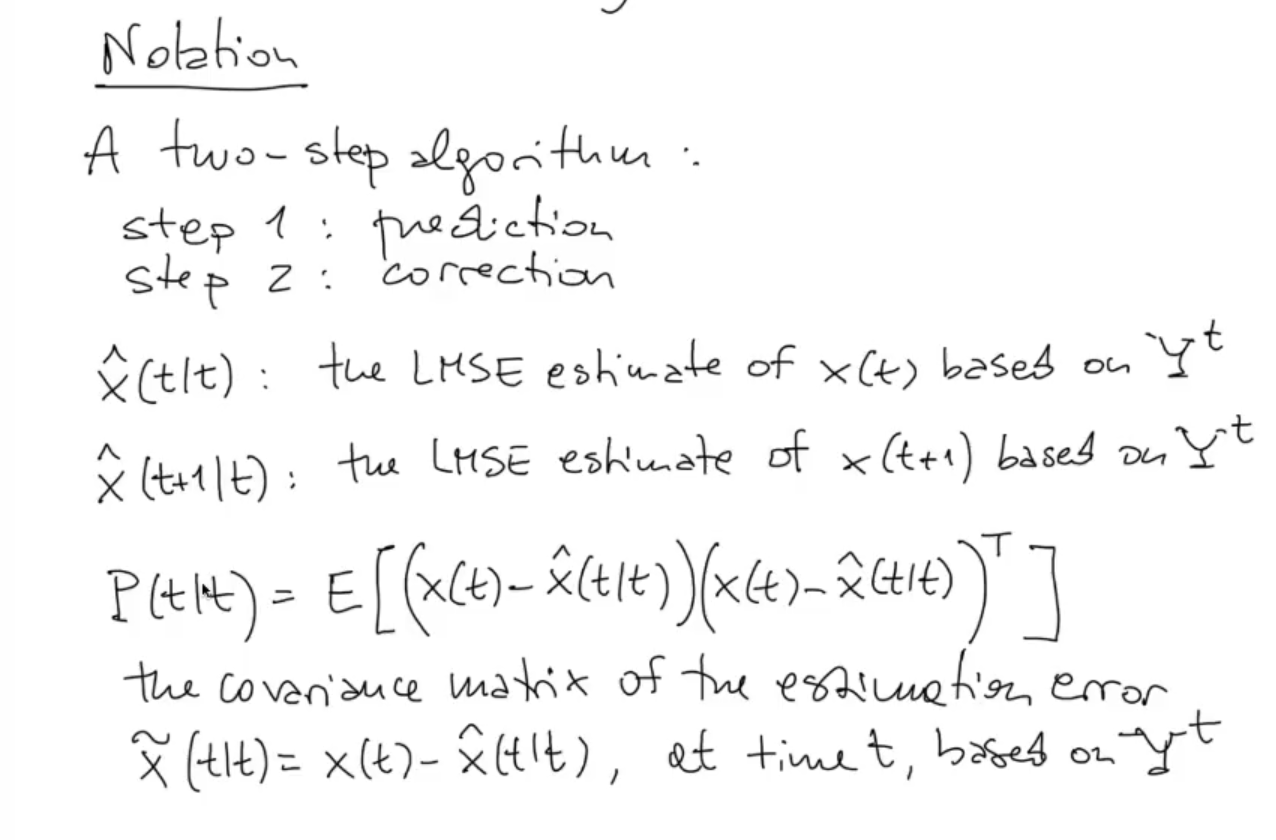
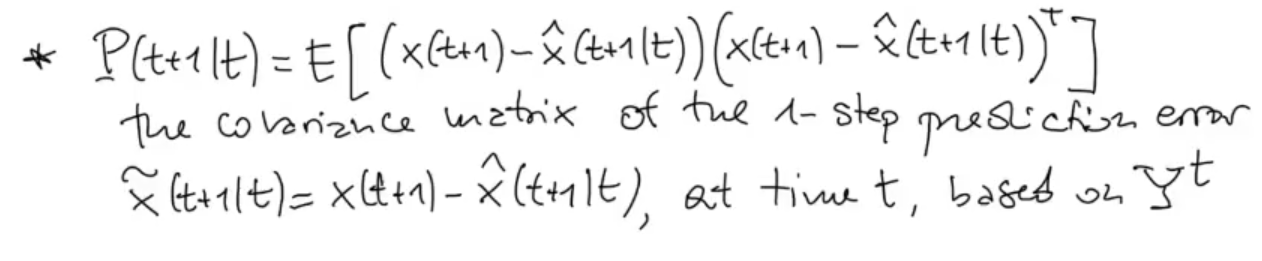
NOTE: Defined as “covariance matrix of the prediction error”.
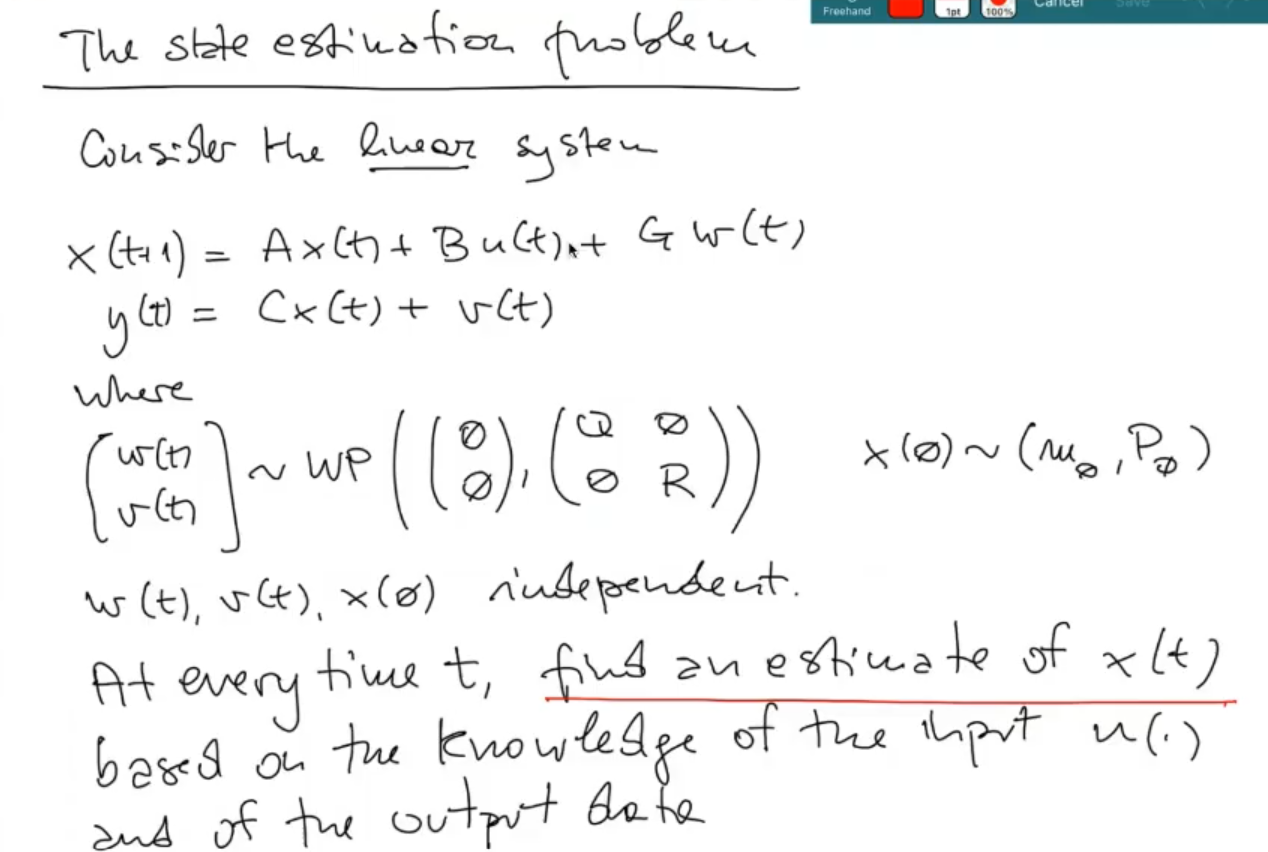
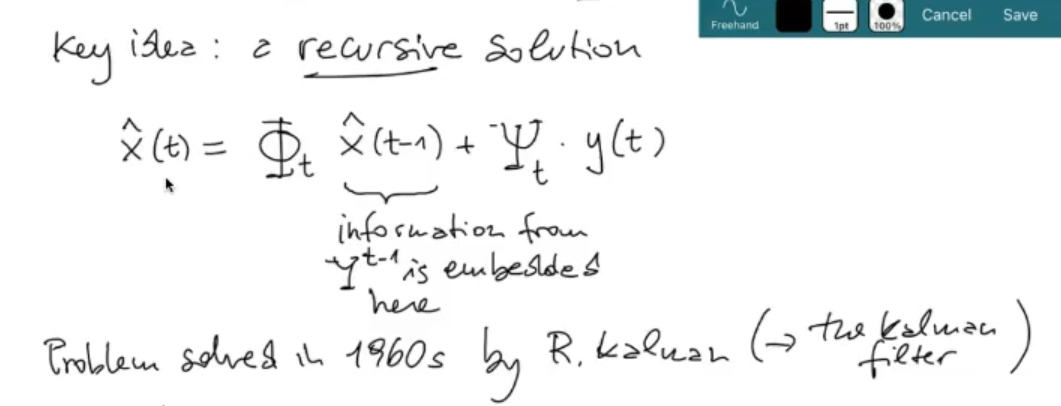
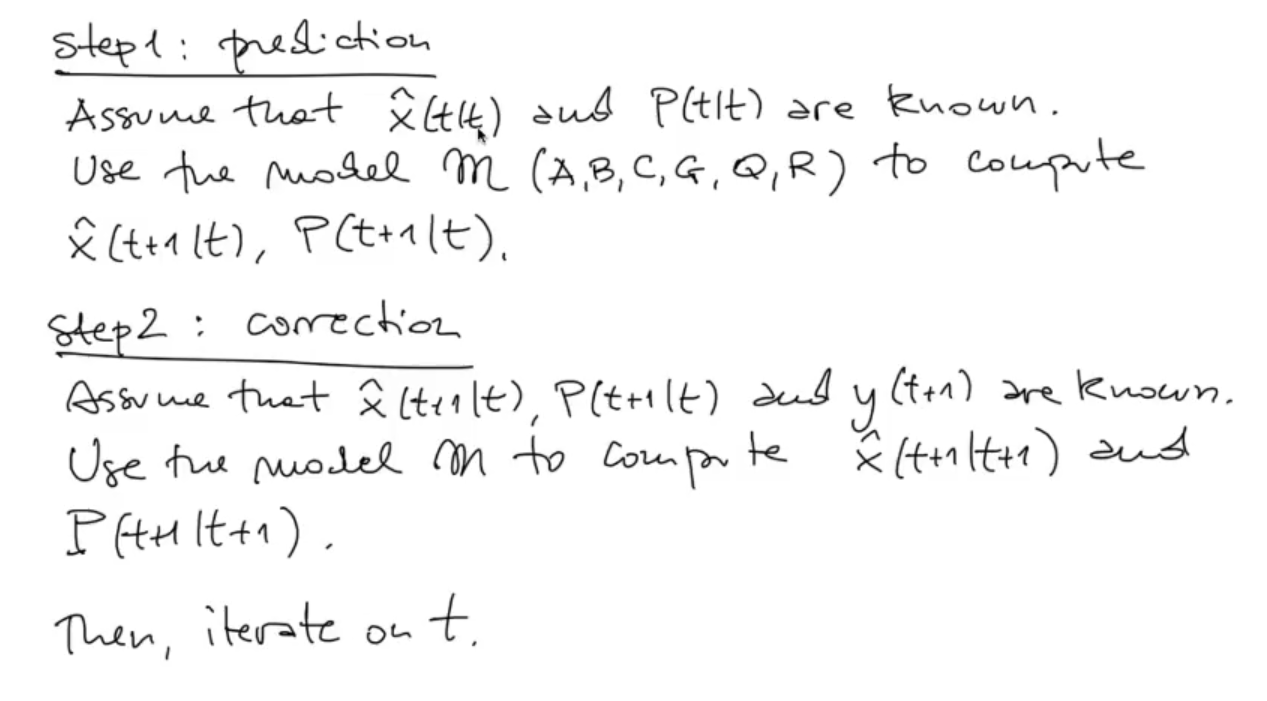
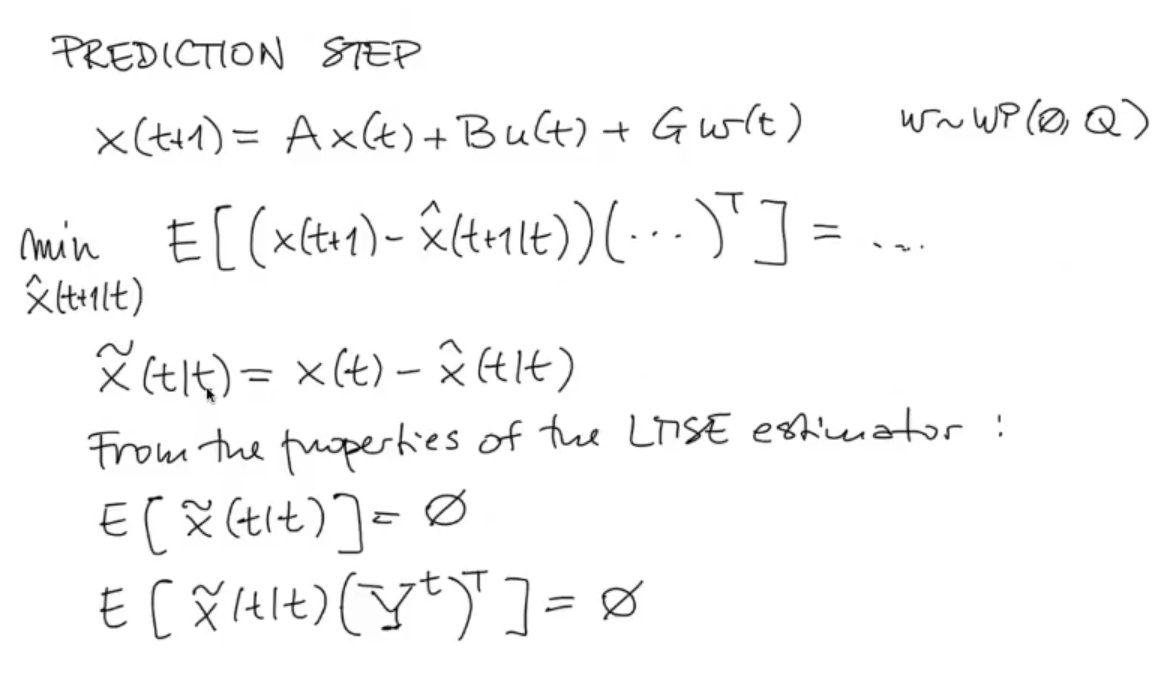
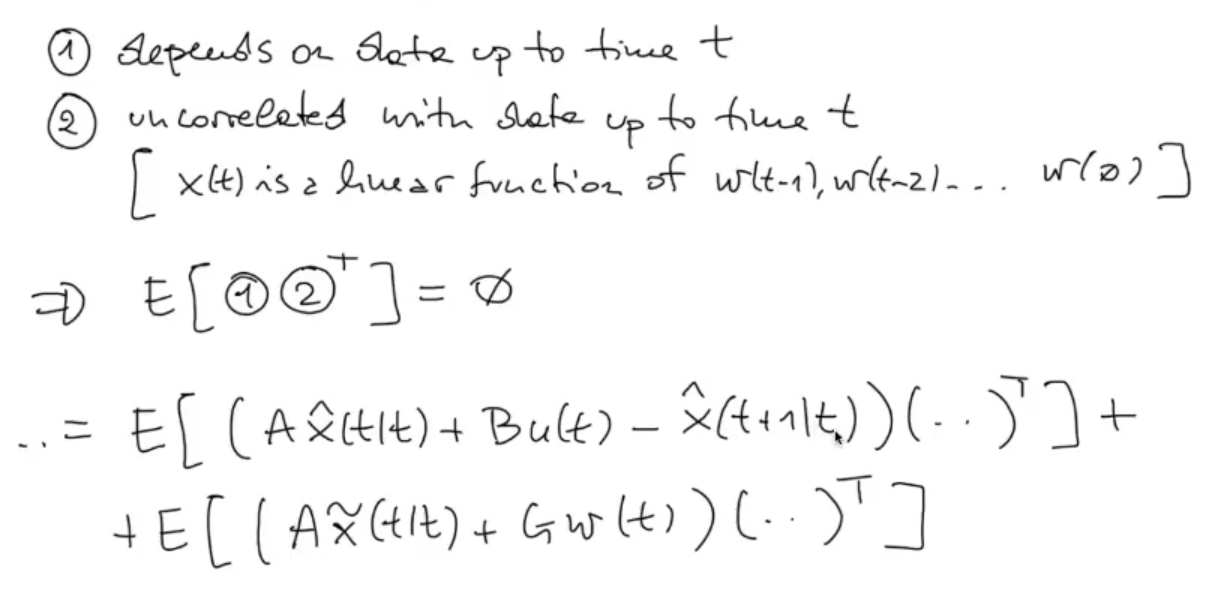
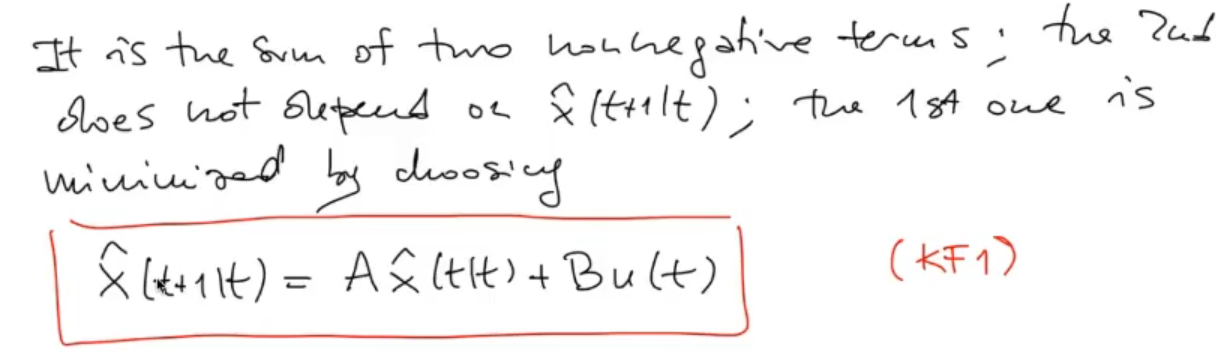
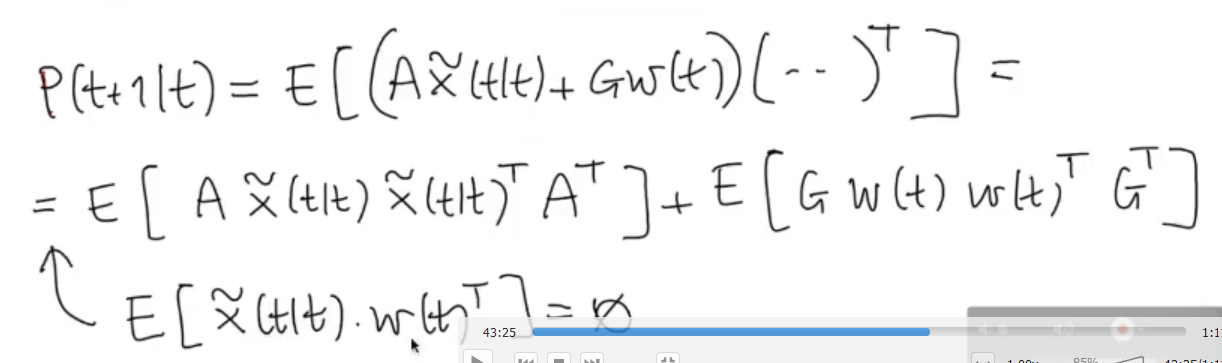
- PREDICTION STEP: we compute the one step ahead prediction of , and for the covariance of the prediction error , using the model .
- We then receive the measurement from the sensor at time : .
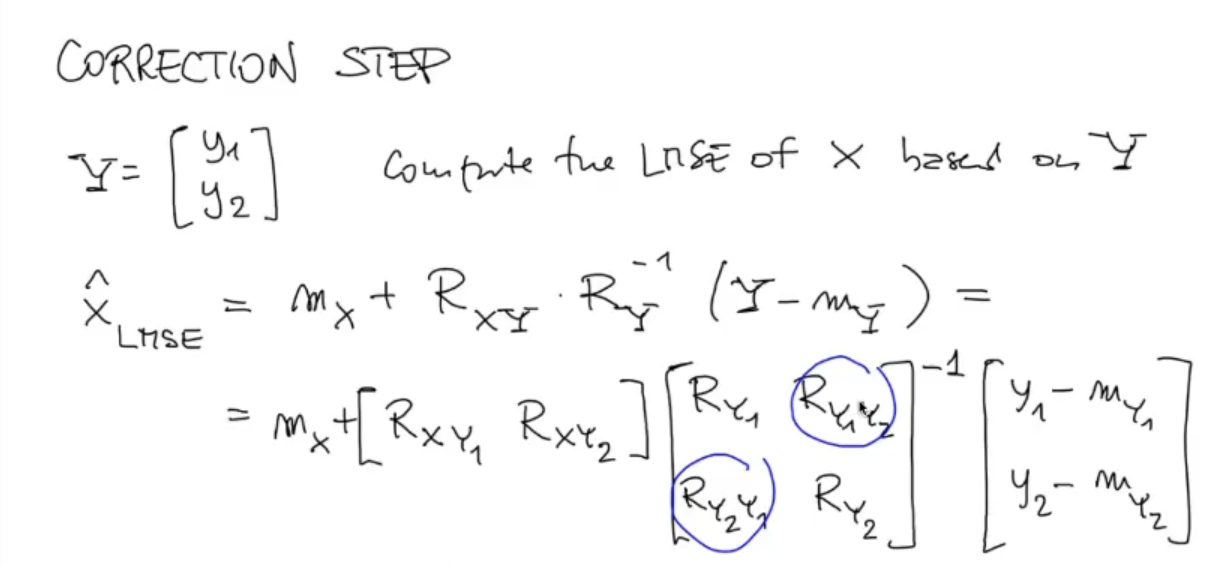
- CORRECTION STEP: with , the calculated predictions and , still using the same model we compute and .

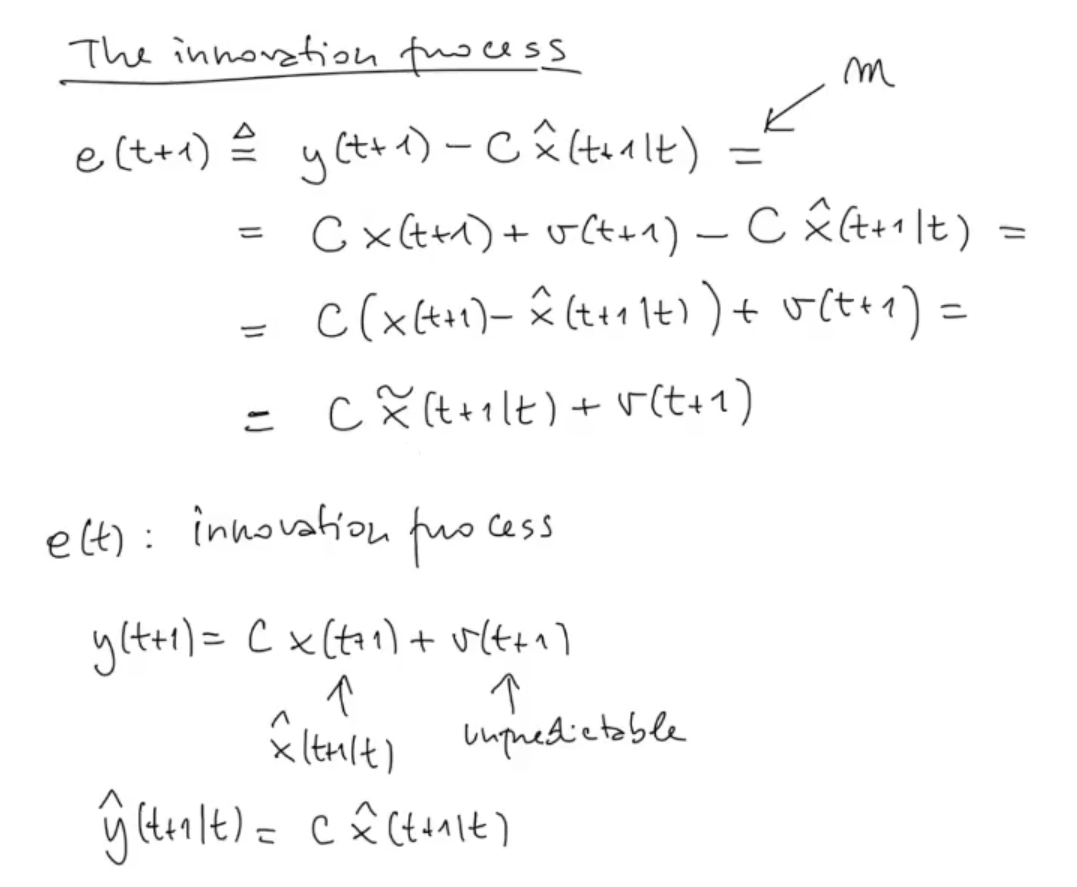 #TODO Is e(t+1) an error???
#TODO Is e(t+1) an error???
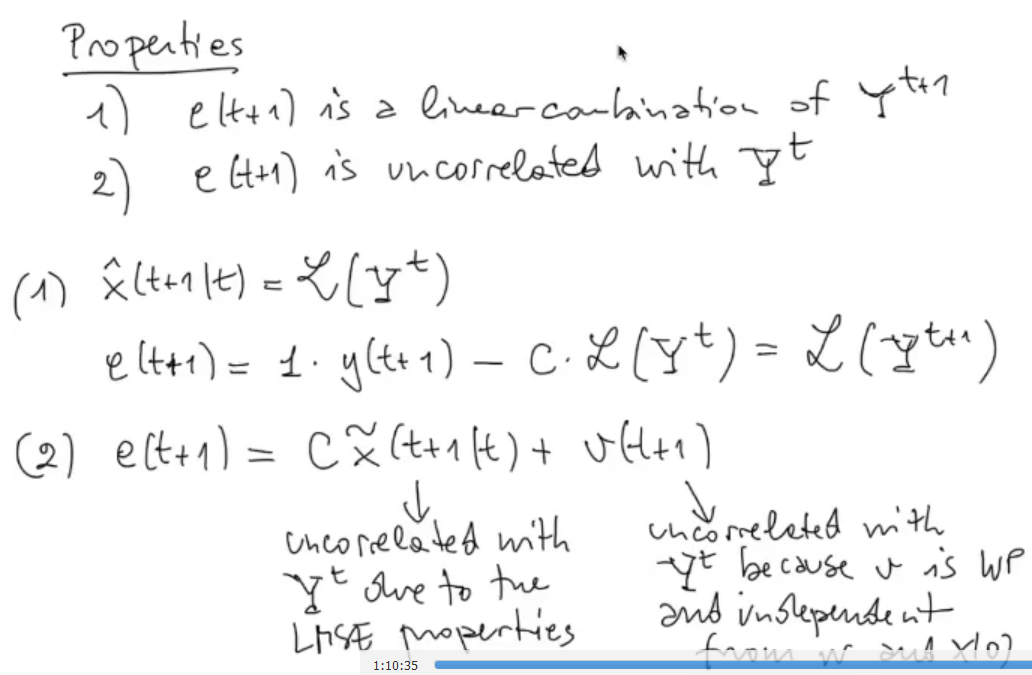
What’s ?
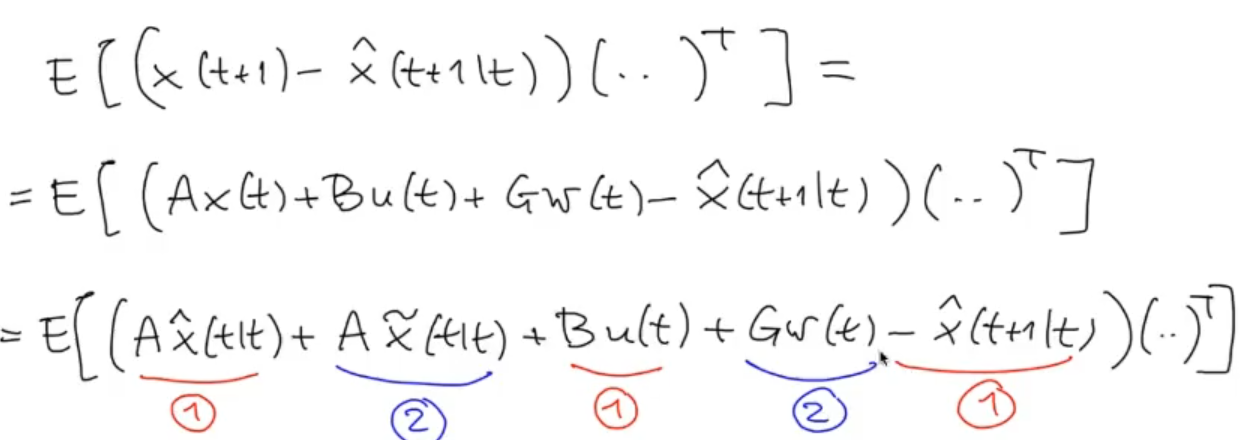
It means that is a linear combination of