Summary
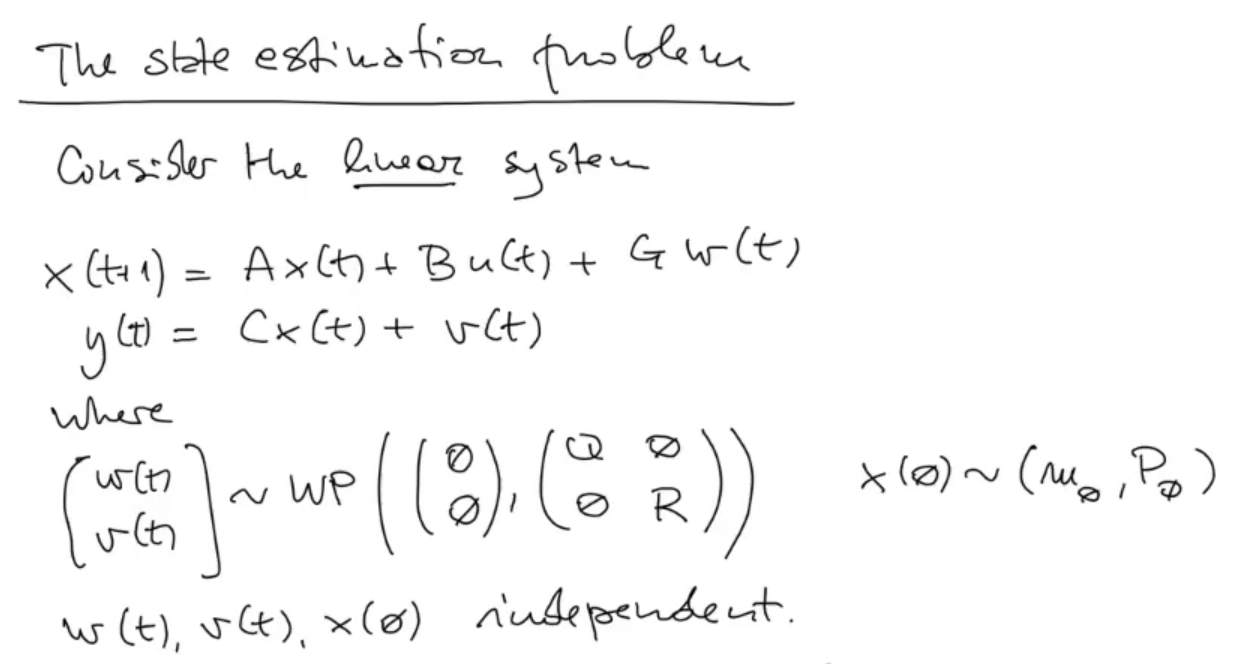
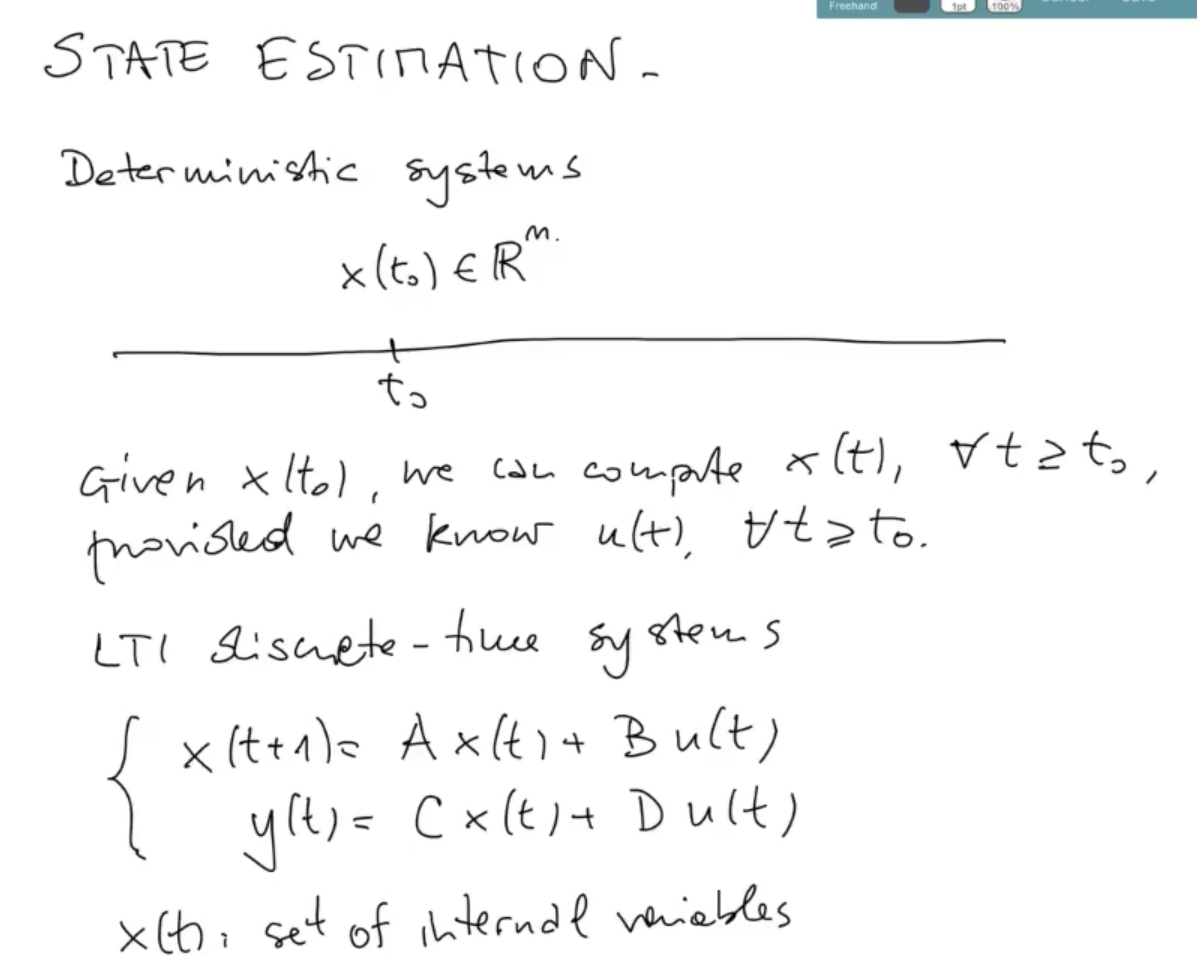
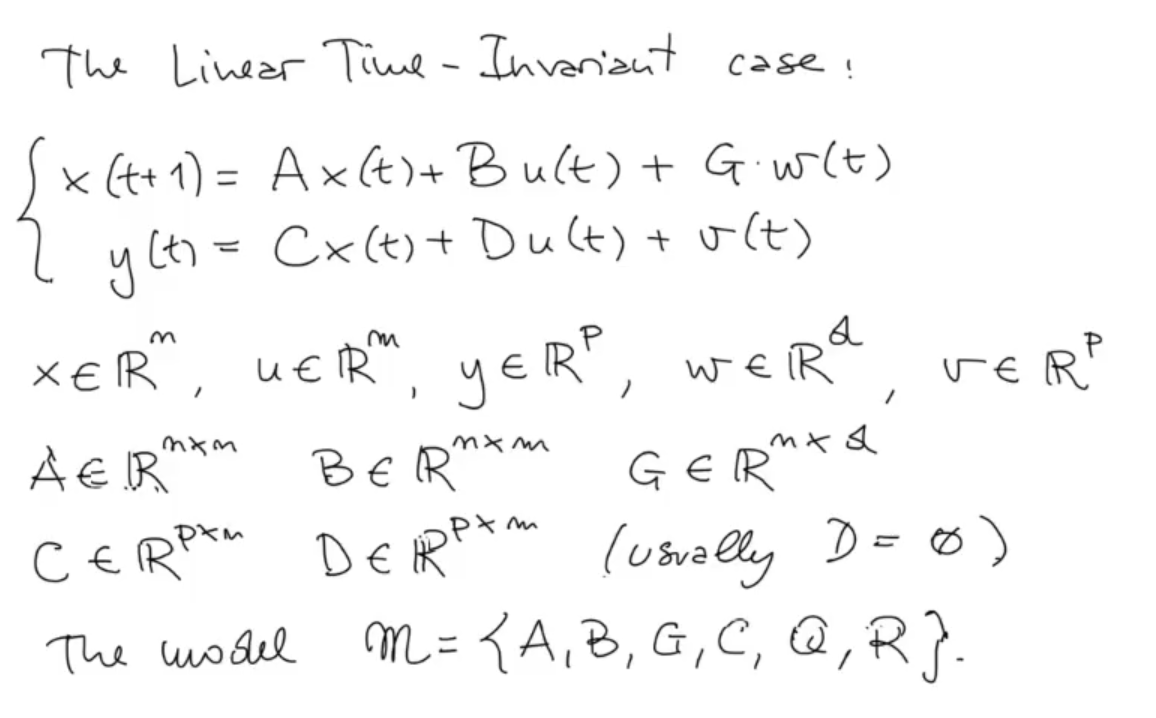
Introduction to the State Estimation problem, we have seen the linear case and defined the generic problem as:
where:
Where:
- is the state of the system
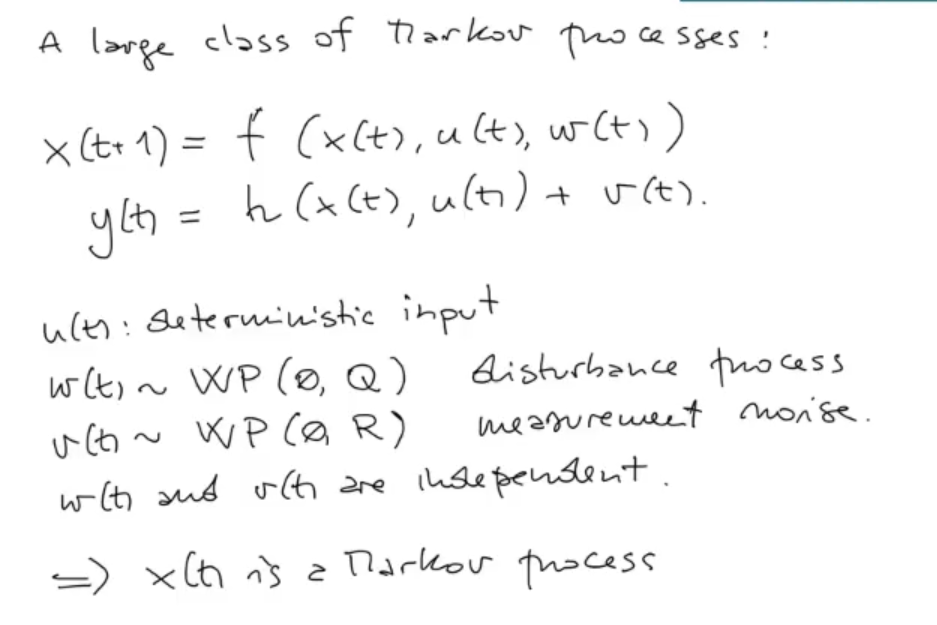
- is the deterministic input
- is the output of the system
- is the disturbance process, a stochastic term, which takes into account the discrepancies of the model, whit respect to the real system.
- is the measurement noise, a stochastic term
We have considered and will consider only the case in which the tre “stochastic sources” , and are independent (the initial condition for the state can be chooses at random). Also we have considered and White Processes as shown above.
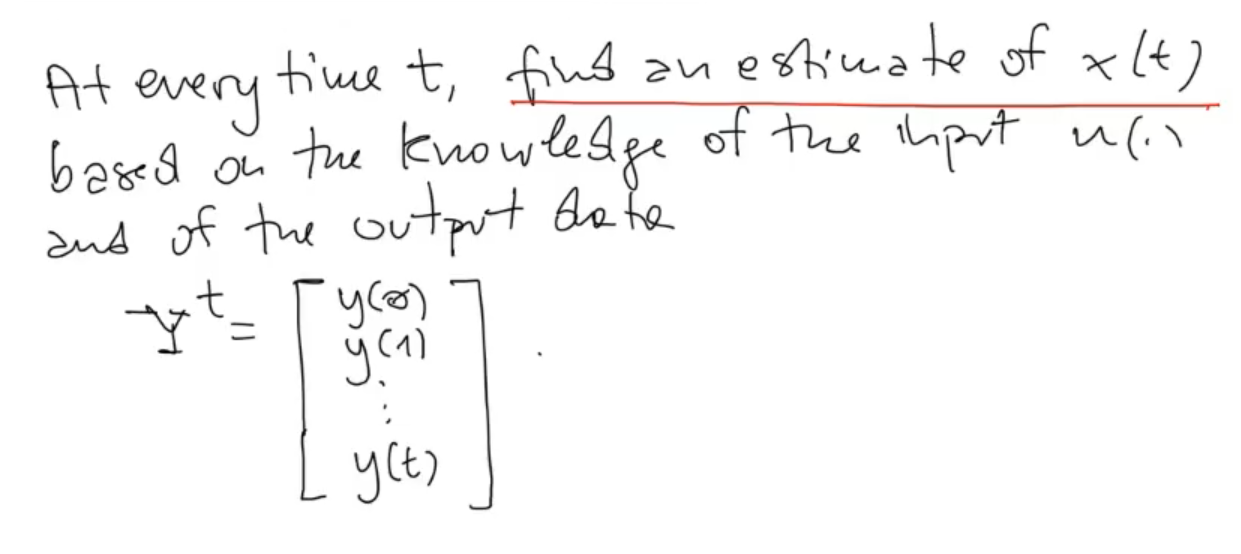
Our objective is to find at every time an estimate of , based on the knowledge of the input and the output data:
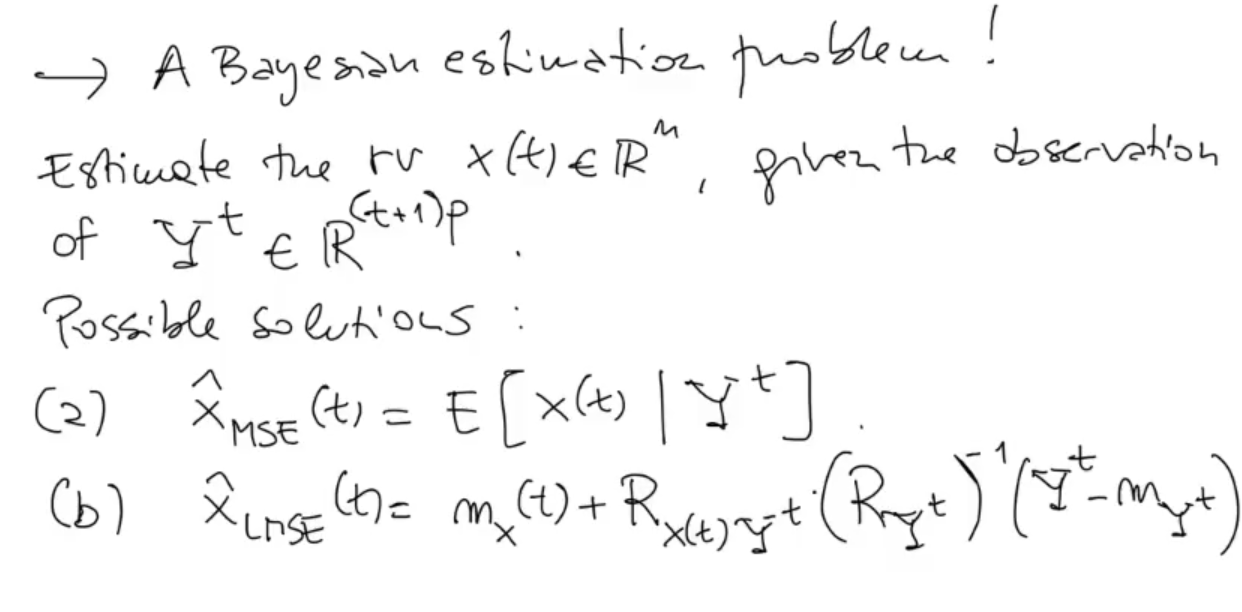
This is a Bayesian Estimation Problem, we want to estimate the random variable based on the observation of another random variable . So from Estimation Theory we know that there are 2 possible solution to minimize the MSE (Mean Square Error):
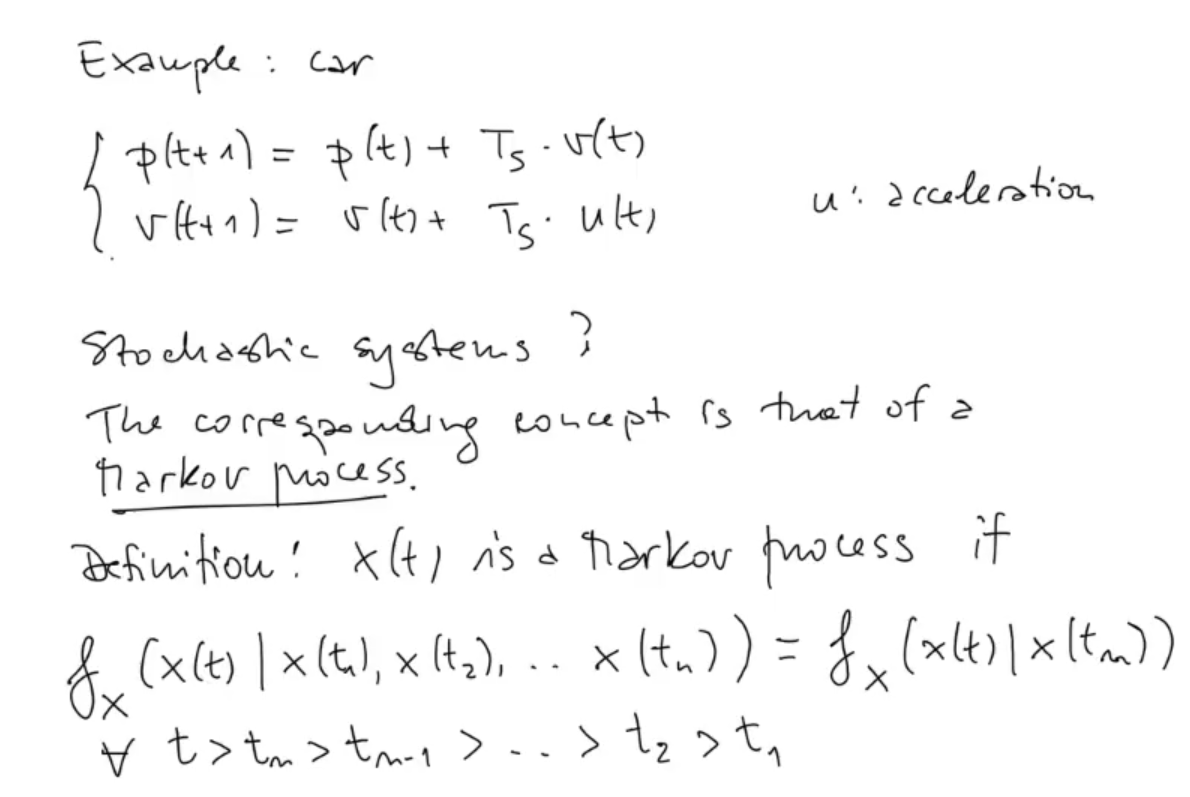 : position
: velocity
: acceleration
: position
: velocity
: acceleration


 #TODO Why ???
#TODO Why ???