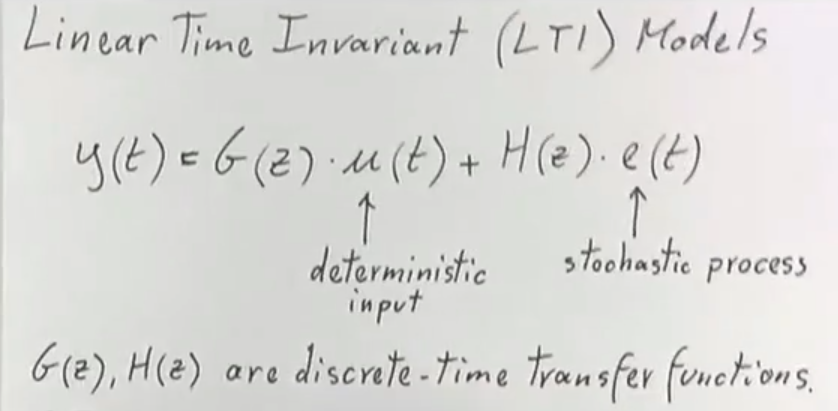
Linear Time Invariant (LTI) Models
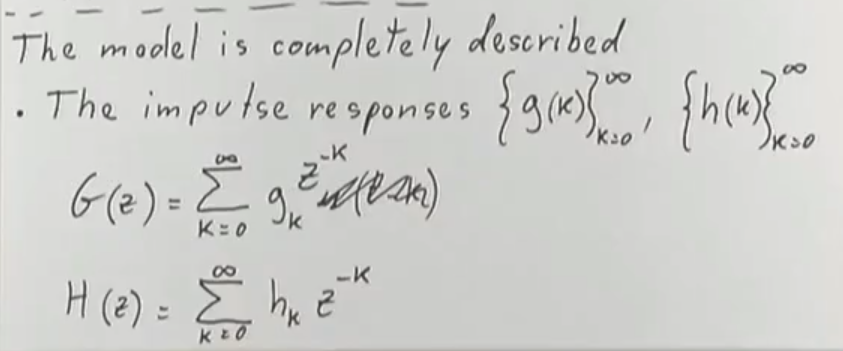
Knowing that:
Then:
- And by the probability density function of
Parametric System Identification
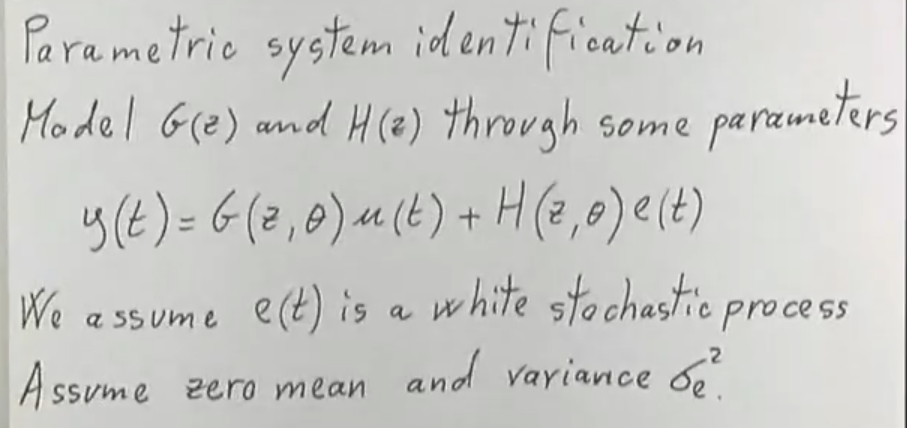
If we assume that the noise is Gaussian also the pdf is known.
ARX Model
Auto Regressive with eXoguenous inputs
 → Similar to an AR Model
→ Similar to an AR Model
Expect for this part:

NOTE: The AR model is defined as:
We define:
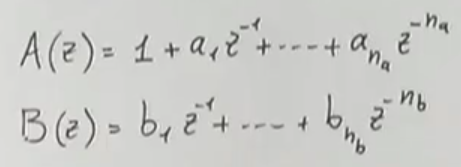
So the ARX Model can be re-written as:
And i can find that:
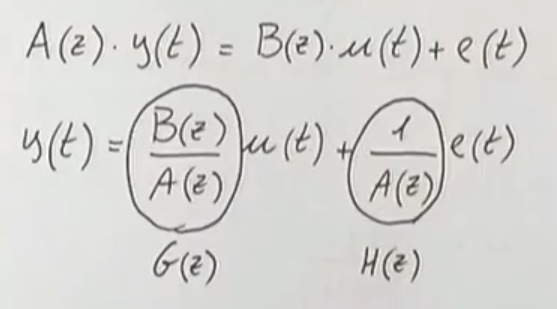
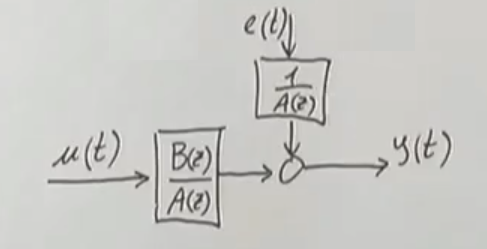
And I can represent the model as:
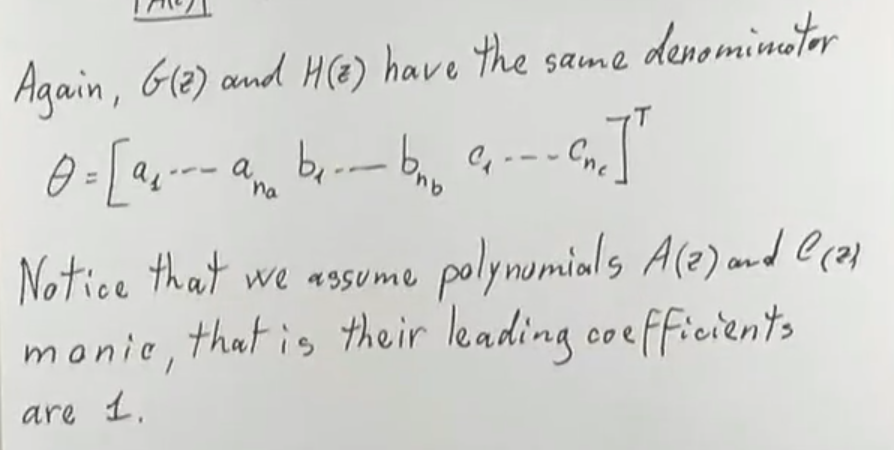
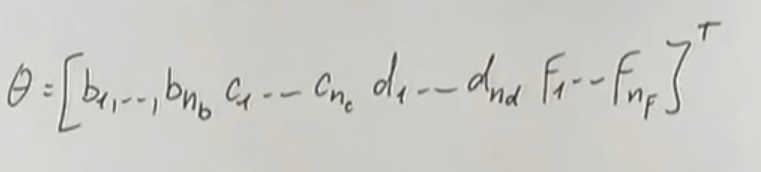
The parametric vector model is given by:
Of dimensions:
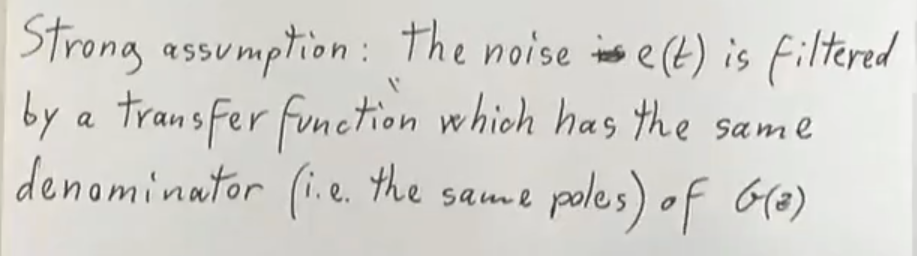 (This strong assumptions is difficult to motivate)
(This strong assumptions is difficult to motivate)
FIR Models
Finite Impulse Response
- Subset ofTODO [ARX Model]
Then the input/output response will be equal to:

Monic Polynomial
is defined as monic if it’s “leading coefficient” (the …) is and all the other coefficient are multiplied by , , , or (resulting in a polynomial of grade 0)
~Ex.:
ARMAX Model
TODO [Auto Regressive Moving Average] with eXtrogenous Inputs

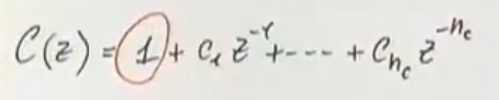
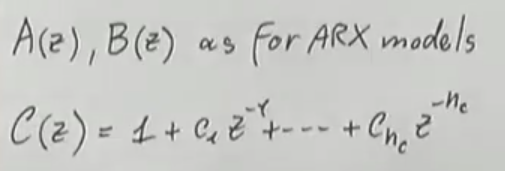
We define:
So:
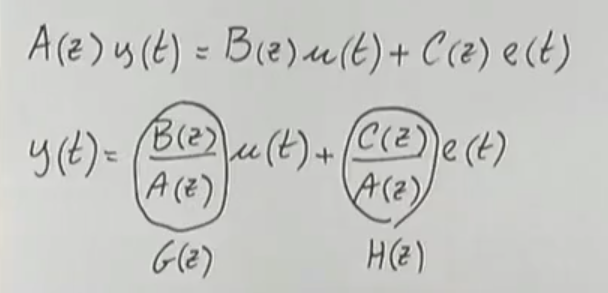
Model representation
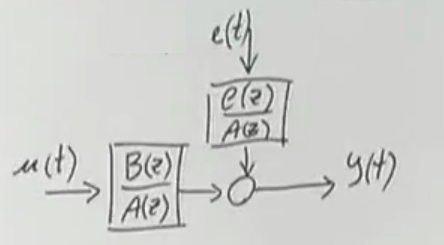
NOTE: is notTODO [monic] Because the system does not depend on the input at time : The input at time is just the noise
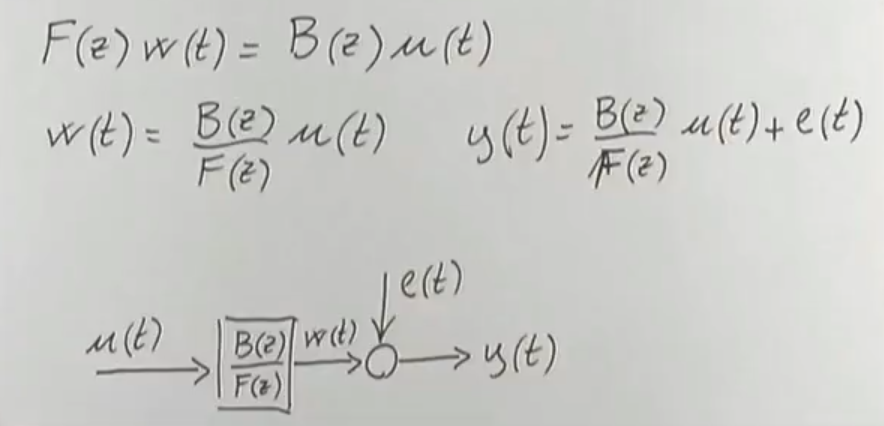
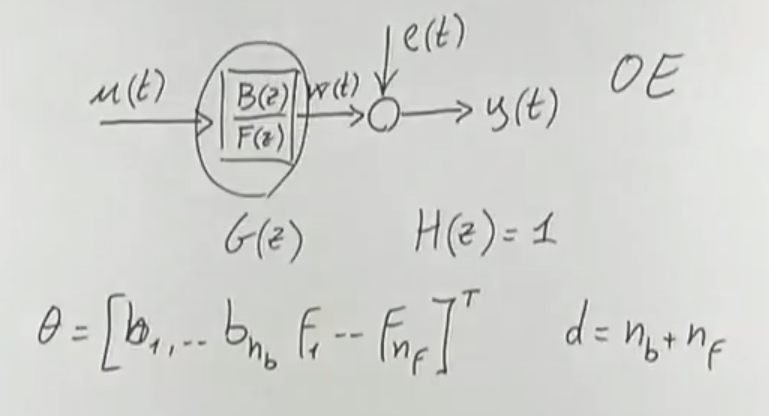
OE Model
Output Error
We assume that
Where is defined as:
 → Which is very similar to anTODO [ARMAX Model], except for the noise that is moved to the formula above
→ Which is very similar to anTODO [ARMAX Model], except for the noise that is moved to the formula above
We define:

So:
 → Which is different from anTODO [ARX Model] because the error is not filtered.
→ Which is different from anTODO [ARX Model] because the error is not filtered.
The structure of an OE model is defined as follows:
BJ Model
Box-Jenkins Model, the name of this model is given after the 2 surnames of the guys that firstly used this model.
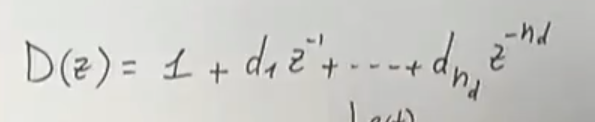
We define:
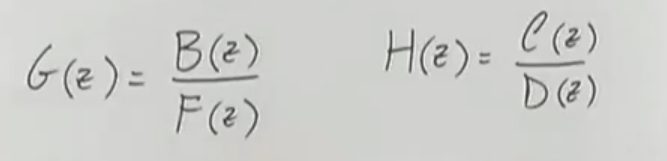
Where is aTODO [Monic Polynomial]:
The model structure is:
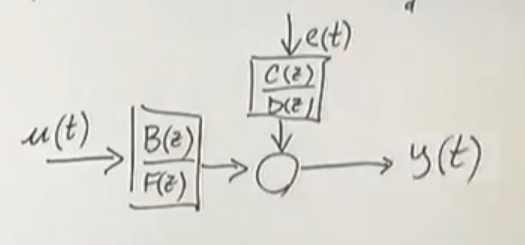
The parametric vector model is given by:
 → Differently from theTODO [OE Model] is that we have new parameters: and
This means having a more complex model, that results in:
→ More freedom
→ The identification process is more complex, so more prone to numerical errors
→ Differently from theTODO [OE Model] is that we have new parameters: and
This means having a more complex model, that results in:
→ More freedom
→ The identification process is more complex, so more prone to numerical errors
So for theTODO [Principle of parsimony] if I can represent well my system with a more simple model (in this case theTODO [OE Model]), I should do so.
General Model Class
Let’s group all the following model classes into one:
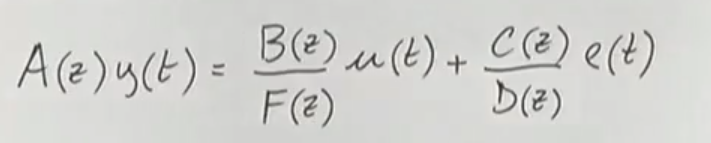
So for:
- → We obtain anTODO [FIR Model] (just )
- →TODO [ARX Model] ( and )
- →TODO [ARMAX Model] (, and )
- →TODO [OE Model] ( and )
- →TODO [BJ Model] (, , and )
NOTE: For theTODO [Principle of parsimony] if I can represent the general system with a more simple model (one from the list above), I should do so.
Delay in Input

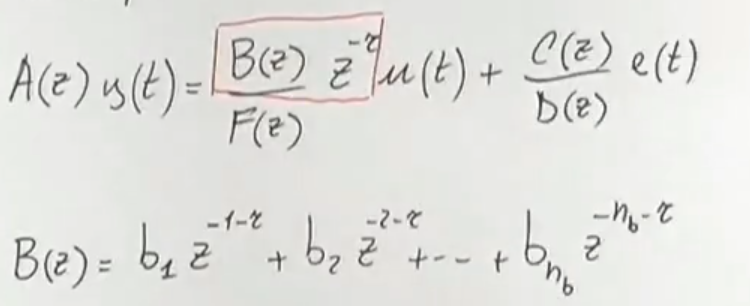
If we know the delay we the problem is the same asTODO [General Model Class]. Otherwise we have a new parameter to estimate, the delay .