Professor Notes
notes_system_identification.pdf
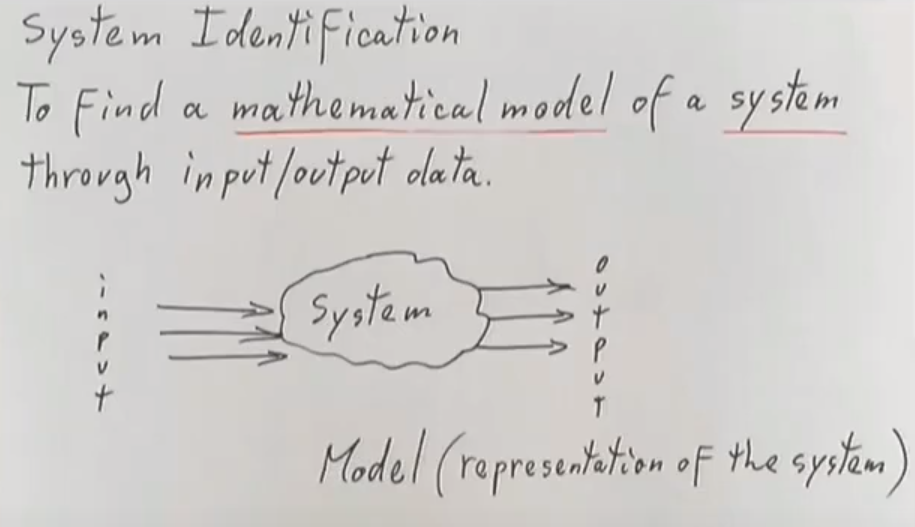
System Identification
Why do we need to find a model of the system? → Control the System → Prediction
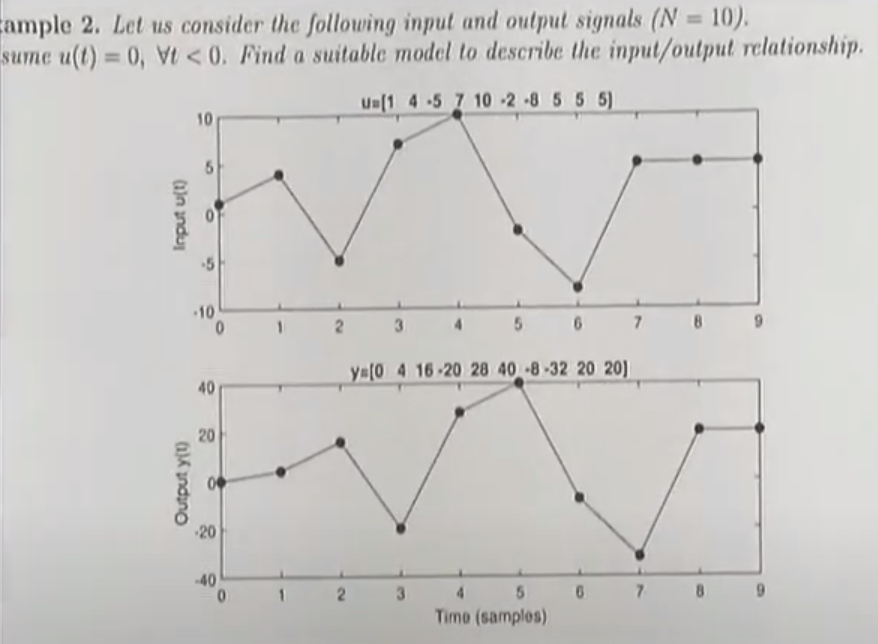
~Ex.:
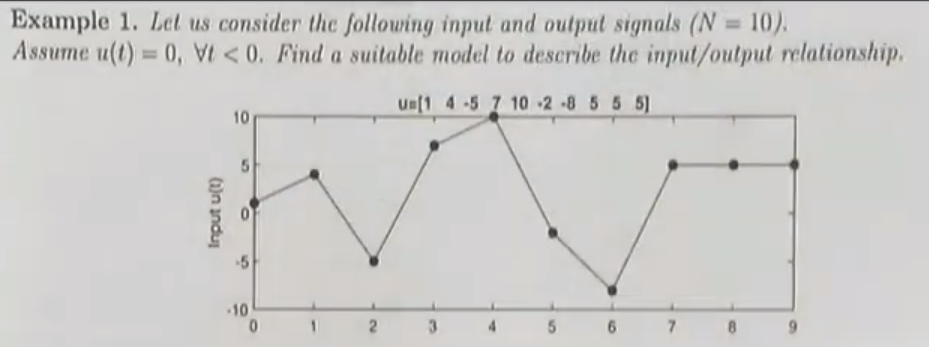
Given the input i obtain the following output
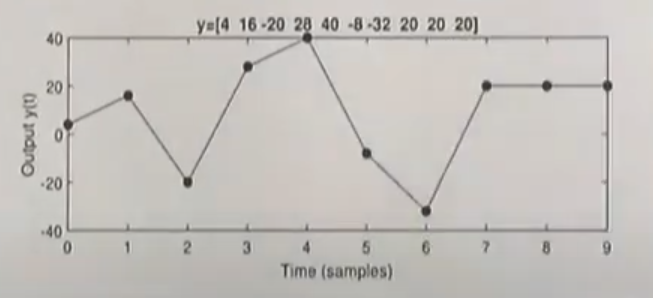
→ Model of the System
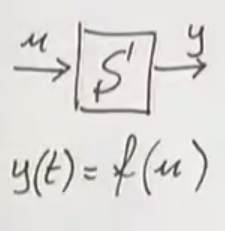
Will be something like: → f(u) =
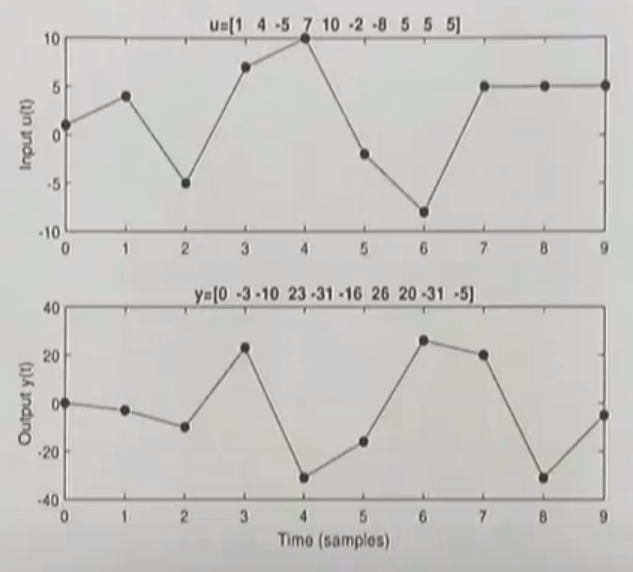
~Ex.:
Same input as before but the output is slightly different
 (There is a delay in the input/output response)
(There is a delay in the input/output response)
→
~Ex.:
Same input, another output, this time really different from the output.
The solution this time around is:
~Ex.:
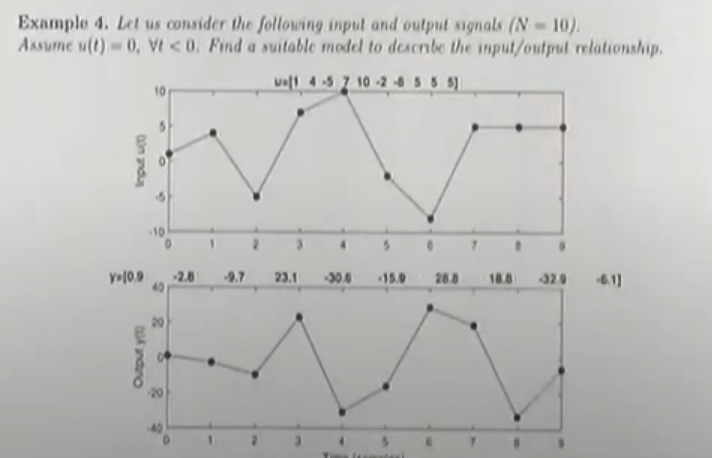
Strangely the solution is the same as before:
This happens because of the noise affecting the system
→ The first 2 examples where noise-free, while in this example there is a noise. → We don’t know the noise, it immeasurable.
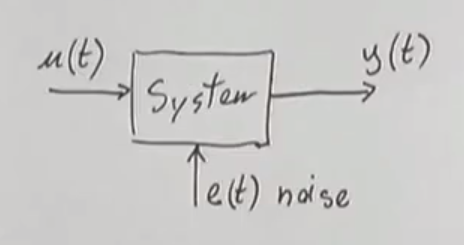
Noise
Assuming the noise is a Random Process that it’s affecting the output we can model the system as:
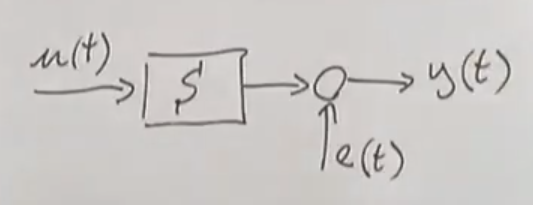 Where:
→ : input
→ : output
→ : noise
Where:
→ : input
→ : output
→ : noise
Main Elements of System Identification
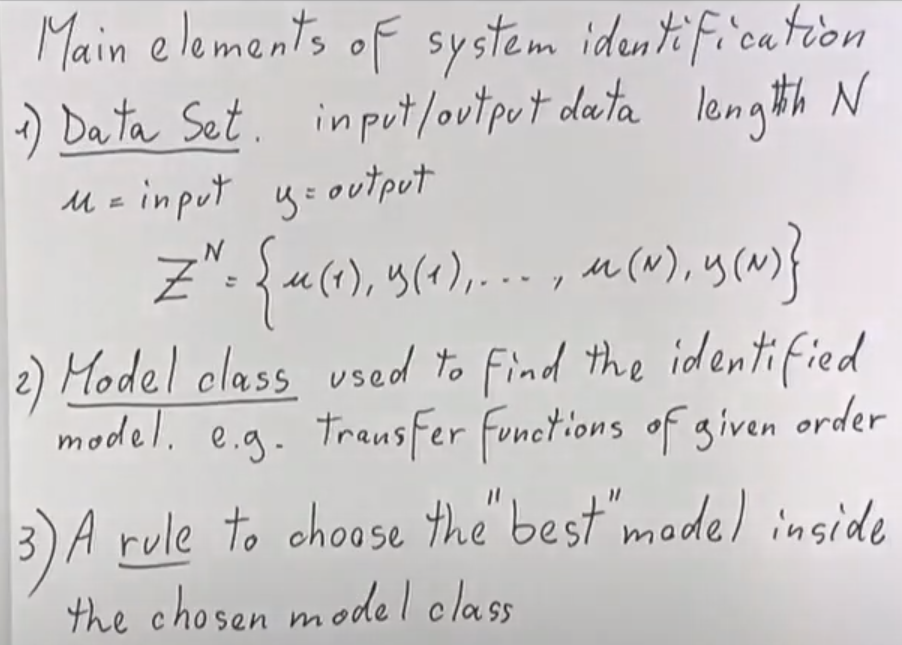
Data Set
Characteristic of the Data Set
- Data Set Domain: in this course we will consider input/output data in the time domain (another possibility could be the frequency domain)
- Length of the Data Set
- Sampling Time
The input can be chosen by the user or not. ~Ex.: in an electrical circuit i can choose the input voltage and current (can be chosen by the user) ~Ex.: the input of the system is given by a controller (cannot be chosen by the user)
The input must be as informative as possible
 → The second definition of the input is much more meaningful
→ The second definition of the input is much more meaningful
Model Class: Parametric System Identification
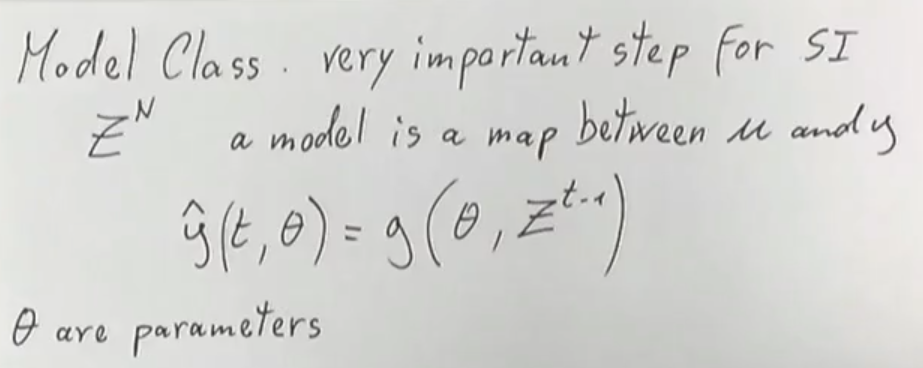
What we will see is a kind of system identification called Parametric System Identification, this technique has the scope of finding the parameters that define a given model:
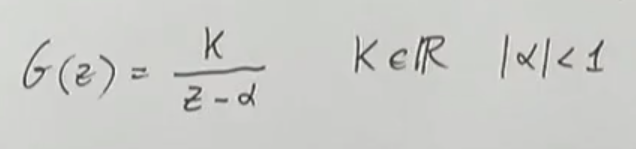
~Ex.: Family of Transfer Functions
Then i can say that the “parameter vector” :
 We want to find specific values of and , our parameters, we call this specific values the parameter vector.
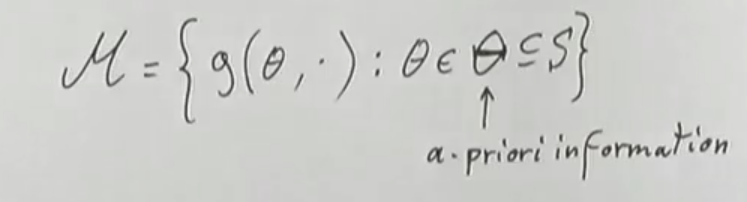
While the family of all possible parameter vectors in this case is called also called a priori-information.
We want to find specific values of and , our parameters, we call this specific values the parameter vector.
While the family of all possible parameter vectors in this case is called also called a priori-information.
Or i can say that:

Model Class: Non-Parametric Models
For example i want to identify a model by its impulse response Or maybe I’m interested in its frequency response
Model Class: Gray or Black Box Model
If we have some prior information on the system. ~Ex.: if we have some physical information about the system. Then we can use the “Gray Box Model”.
Else if we don’t have prior information we talk about “Black Box Model”.
~Ex.: Spring Dump Mass Model
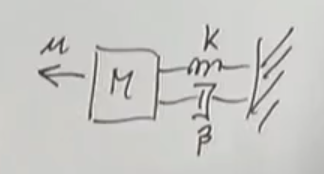
We know the formula of the spring and dump, also the first law of Newton so we can use the Gray Box Model.
NOTE: We can instead use the Black Box Model but we will throw away useful prior information, using only input and output response.
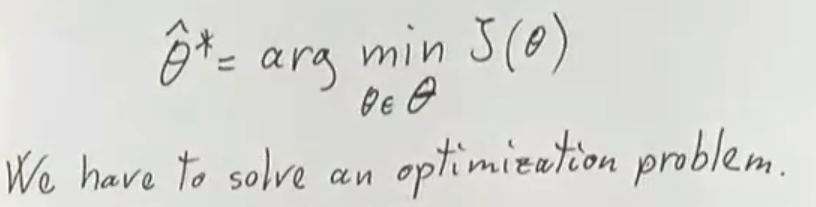
Choice of the ‘best’ model
We want to find which minimizes a given cost function
The complexity depends on various elements:
- : the function i want to minimize
- : how big is theta
Suppose you have a set of candidate models , then I want to choose a model inside such that its “distance” is minimum from the theoretical model given by the input-output model (given for example by a Black Box Model).
NOTE: We say this because often no model inside respects the input-output model, and remember we can only chose a model inside .
→ So given a set of model we need to validate them.
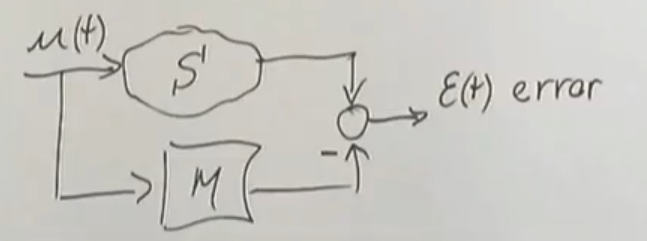
Model Validation
Assess the quality of the model and it capacity to satisfy the requirements. → It must be able to predict (or simulate) future outputs
Given a system and the model we want to minimize the error
Reasons to fail validation:
- Optimization process may not converge ~Ex.: due to numerical process (cannot find a feasible solution)
- Wrong choice of the cost function
- Wrong choice of the model class ~Ex.: System of second order, we choose a first order model class
- The dataset is not informative enough
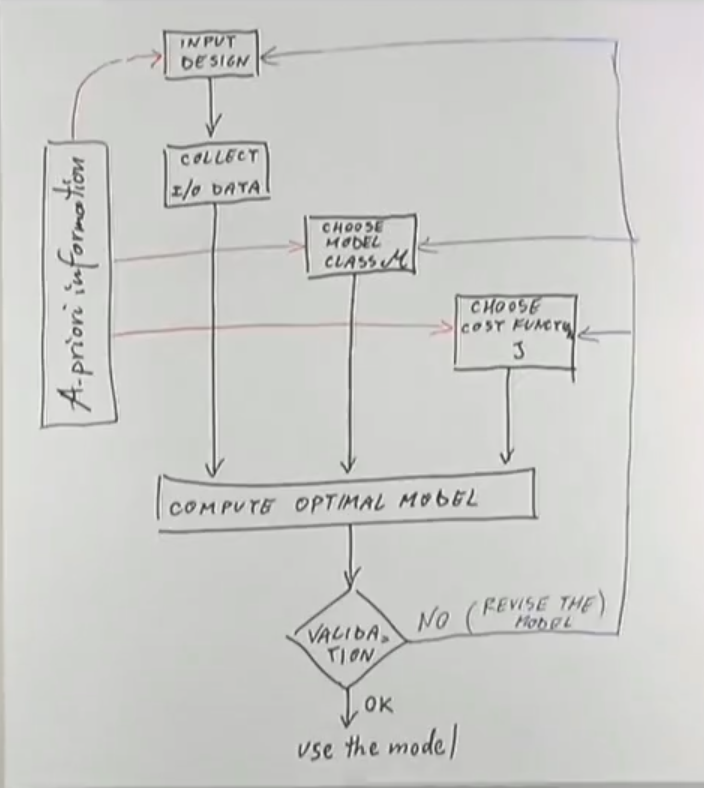
Identification Process
An iterative process that I need to repeat until I find a good model. → A good practice is also to iterate even if I find a good model at first try.
Principle of Parsimony
If i have 2 models that have same quality and same performance I prefer the simplest one.