Summary
If we know the lifetime of the events in a system, and they are deterministic (~ex.: event will happen @ 2:30, @ 2:45, @ 3:00, @ 4:20, …), then we can use a Timed Automata to describe the system.
A Timed Automata can be defined using 6-tuple ():
- () : the same as state automata.
- : Clock Structure (~ following the ex. before: {, , , , …})
- where: : lifetime of event
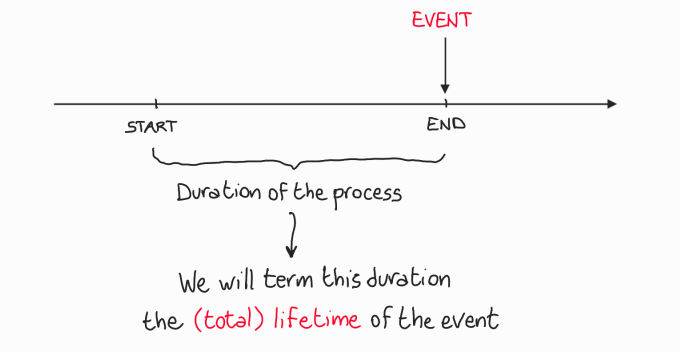
We define an event dependent on time as: Event the outcome of a process.
Event terminology:
- an event is activated, when the corresponding process is started.
- an event is paused, when the corresponding process is stopped temporarily.
- an event is resumed, when the corresponding process is restarted after a pause.
- an event is cancelled (or killed), when the corresponding process is stopped and will not be resumed.
- an event occurs when the corresponding process is terminated.
Score of an event how many times the event occurred.
Given a State Automata described by the 5-tuple (): Then we
Timed Automata
Expand the State Automata with the concept of time.
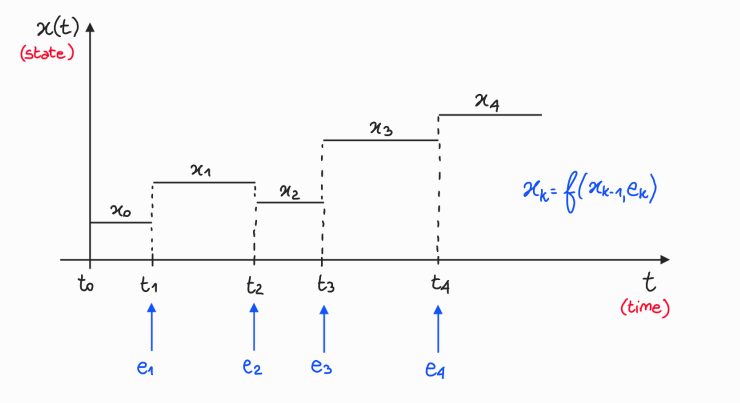
- Given a feasible event sequence, the State Automata returns the corresponding state (or output) sequence:
- No information about when events (and therefore state transition) occur
- Needed for example, to draw the sample path (or state trajectory) of the system:
We cannot simply add time at the sequence of events: Because for example if a processor that executes tasks has a FIFO scheduling policy, or a RR one we cannot establish a correct system without this information.
So the time instants when events occur are dependent variables of the DES, they are outputs of the timed models.
Example of a FIFO queue Example of a RR queue
Notice that:
- In the previous examples, execution times of each task were independent of the system (they were properties of each task, depending on the number of instructions each task consisted of).
- Conceptually, execution times are total durations of the execution process of each tasks.
- An event d (termination of the execution of a task) occurs at the end of the corresponding execution process.
Modelling assumptions:
- An event is the outcome of a process.
- The process is typically unspecified, and described only by its duration.
So we give this definition to Timed Automata
Terminology for events
We first introduce some terminology. We say that:
- an event is activated, when the corresponding process is started.
- an event is paused, when the corresponding process is stopped temporarily.
- an event is resumed, when the corresponding process is restarted after a pause.
- an event is cancelled (or killed), when the corresponding process is stopped and will not be resumed.
- an event occurs when the corresponding process is terminated.
Score:
Basic Example of Event Timing Dynamics
Note:
When writing an algorithm to simulate a system, we always have to tweak some part of it, NO GENERAL ALGORITHM CAN BE USED FOR SYSTEM SIMULATION.
TODO: Rules for transforming a clock structure (input) into a sample path (output):
The following rules define the event timing dynamics of a timed automaton.